

影响视觉识别与定位系统的关键因素
工业控制
描述
机器视觉在生产制造中主要用在视觉引导,尺寸测量,产品检测,物体识别等几个领域。 在这几个领域中,一个最基本的算法就是产品识别和定位,比如视觉引导机器人,要在图像中识别出要抓取的产品,并定位出坐标,才引导机器人到的产品位置。尺寸测量,产品检测等也是一样的,在测量和检测之前,首先要知道有没有产品,产品的位置在哪里,才可以应用后续的各种分析工具。 因此,产品识别和定位是一个基本问题。
01
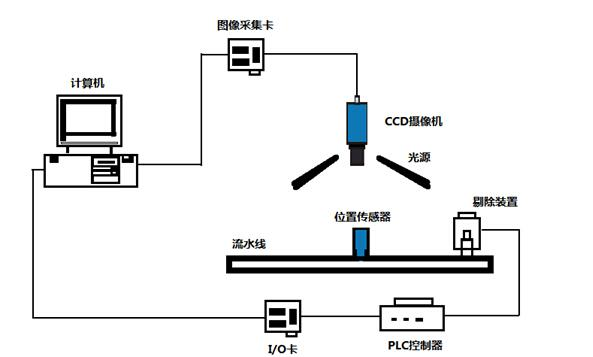
视觉定位系统组成
依托机器视觉的机器人定位系统包含摄像机系统和控制系统。 其中摄像机系统中包括计算机(具有图像采集卡)、摄像机,主要收集视觉图像,并应用机器视觉算法。控制系统包含控制箱和计算机,对计算机末端具体位置完成控制。 工作区利用CCD摄像机进行拍摄,并使用计算机识别图像,得到跟踪特征,完成数据的计算和识别,借助逆运动学方式获取机器人每一位置的误差,再对高精度末端执行模块进行控制,科学调整机器人的位置和位姿。
02
视觉定位系统关键因素
在工业生产领域,尤其是工业机器人的应用中,视觉识别定位系统显得尤为重要,在实际的生产中,我们要关注的不仅是能不能准确抓取,同时还要关注到其速度问题,而这一块一直是行业内的问题,我们经常遇到的工业机器人抓取通常速度是比较慢的。而一旦将速度提升上来,抓取的精度便会产生问题。 这也是视觉识别定位系统的难题,接下来我们跟随小矩来一起了解下吧。 首先是数据量,在较为复杂的生产环境中,系统需要准确找到需要识别定位的产品; 其次是速度,如何在一些标准的生产线将速度提升到ms级别,过往的算法虽然可以在普通发挥作用,但是随着算法不断发展,深度学习算法往往需要搭载更加理想的GPU来实现; 然后便是问题的核心,定位精度,在深度学习系统中,我们看到的图像都是有一定的缩放,我们需要整个系统在原图达到像素精度的匹配; 剩下的就是识别的准确性,在很多情况下,我们能能到的学习数据很少,在这种状态,如何来进一步提高识别的准确性!
04
视觉定位 面临挑战
如果要设计一个可行的产品识别和定位的算法,需要克服几方面的困难:
1、快速的指定产品 工业产品千差万别。因此,对于每一个具体的应用,需要从几张,甚至一张图像上,快速指定需要查找的产品,比如当前产线需要定位铆钉的位置,拍一张照片并进行相应的学习,就可以在后续的图像中进行搜索定位。
2、快速的搜索产品 对于一张200万像素的图片,通常要求在几十毫秒的时间可以识别和定位出产品的位置。
3、高精度的定位 工业生产对精度和公差有严格的要求,因此产品的定位就要力求准确。现在普遍要求识别定位算法可以达到一个像素级别的定位精度,甚至可以达到亚像素级别。
4、可以适应产品缺失、遮挡、脏污等的影响 如果一个产品被遮挡,导致产品在图像中缺失一定比列,需要依然可以识别定位到物体。反之,如果产品表面发生脏污,导致表面的特征发生变化,需要依然可以识别定位。
5、可以适应光照亮度不均匀的影响 如果产品的亮度发生变化,比如一半亮一半暗,需要依然可以识别定位。
6、可以识别旋转的产品 产品通常可能在360度范围内旋转。
7、可以识别多个产品 一张图像中可能有多个产品,需要分别识别定位。
8、可以准确识别接近对称的物体 接近对称的物体很容易别识别成错误的方向,需要进行相应的设计。
9、可以应对物体的极性翻转 比如学习的产品是白底黑字,但是实际上产品图像有可能是黑底白字,需要可以识别。
编辑:黄飞
-
设计 PCB 时有许多关键因素应该考虑2018-06-07 4121
-
RF测量仪器的发展关键因素介绍2019-07-25 1696
-
决定SMT锡膏印刷精度的关键因素2019-07-27 2632
-
什么是UART串口WiFi模块进入智能家居市场的关键因素2021-01-04 2233
-
拉丝张力是决定光纤性质的关键因素是什么?2021-05-27 1710
-
电信级视频监控系统的关键因素有哪些?2021-06-01 2105
-
请问影响固态硬盘寿命的的关键因素是什么?2021-06-18 2098
-
【原创视频】白话讲解ADC&剖析影响ADC结果关键因素-22021-06-23 3601
-
机器视觉系统中影响图像质量的因素有哪些?2019-05-04 14735
-
云技术的关键因素及关键技术2020-05-06 2382
-
AN-349: 延长CMOS寿命的关键因素2021-03-21 871
-
视觉定位系统关键因素及挑战2022-11-30 1387
-
电池使用寿命是影响物联网设备的关键因素2023-07-14 2270
-
视觉定位系统组成、关键因素及面临的挑战2023-11-21 2590
-
pcb板弯曲的7个关键因素2023-12-27 2224
全部0条评论

快来发表一下你的评论吧 !
