

IGBT认识:电力系统的开关死区的原理、意义和计算
电子说
描述
一、死区时间定义
死区时间,也称为互锁延时时间(互锁:即互相掣肘,对开关管来说就是Q1开通时候,Q2通过结合Q1控制逻辑必须关闭),是指高侧(桥臂上管Q1)和低侧(桥臂下管Q2)功率晶体管同时处于关闭的时间段。Q1和Q2的任何重叠导通将导致大电流流过功率管。即我Q1还没有关断,你Q2就来了(开通了),这岂不是很危险的事。
二、死区时间的意义
死区时间是保证一个桥臂(上管Q1和下管Q2)不会直通的保障条件,这个死区时间一定是根据正常工作条件下得到的最严酷的值而且会认为添加裕量。
采用IGBT器件的电气设备,为了保证可靠地运行,应当避免桥臂直通。桥臂直通将产生不必要的额外损耗,甚至引起IGBT发热失控。其结果将可能导致IGBT器件和整个电气设备的损坏。
三、死区时间设定的原理
原理还是从这句话开始,“ 我Q1还没有关断,你Q2就来了(开通了),这岂不是很危险的事 。 ”
波形表示:如果没有死区,Q1没有关断,Q2随即开通,必定导致一个桥臂上Q1和Q2同时导通,发生直通,出现大电流,引起极端过热,极大可能损坏IGBT。
1 、控制死区时间公式的原理
控制死区时间指加入在控制算法中以使得器件获得足够有效的死区时间。设置控制死区时间的目的是为了确保有效死区时间总是足够的。 计算控制死区时间总是基于最坏的情况考虑 。计算控制死区公式:
S是安全裕量系数**,通常可选1.5,这样死区时间的安全裕量为50%,其它参数参照下面定义。**
上式中,死区时间的定义,包含两部分参数,其中一部分是IGBT开关特性决定的,也就是我们测试系统的双脉冲得到的参数;另一部分则是代表IGBT驱动器特性,是你选择的驱动器决定的。
那么为什么会有如下这样包含开关特性参数的一个式子?
2 、情况分析
我们接着从下面举例波形看, Q1我可以存在关断最快的情况,那么相对Q2你可以开通快一些 ,这也说明我的系统死区可以很小。但是实际状况中,最恶劣情况就是Q1也会存在关断很慢,那么Q1开通就要慢一些,并且是在最慢的情况,就是我Q1关断后,你再来, 那么Q1何时来对于Q1和Q2直通风险最大,当然是你Q2开通最快,也就是开通延时最小的情况下 ,那么系统预留的最小死区就是如下的差值,如下图示意“灰色”和“红色”
当tdon_min延时为零时,这个值达到最大, 也就需要我们预留的控制死区越大 。
至于tf,是指(电流)下降时间,这个对IGBT模块,尤其是感性负载,这个值就较大,看实际定义波形,关断时,由于感性负载相对于VCE下降的滞后性,加之IGBT的拖尾电流,死区也要考虑这个值。下图是几个时间的清晰定义。
所以,这个式子是根据实际的一种推导,并非是无根据的。
3 、参数定义说明
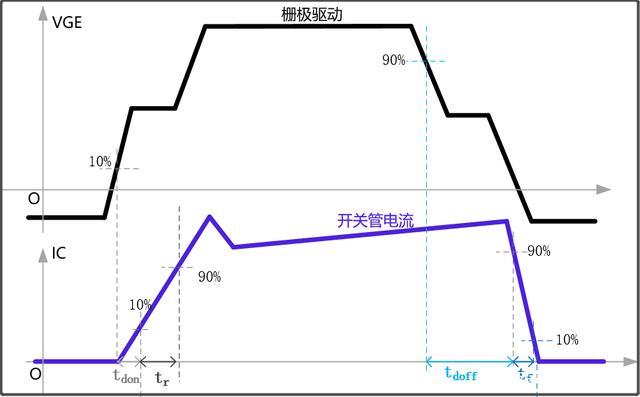
上面我们提到死区是开关特性和驱动器特性共同的结果,首先第一部分式子是IGBT开关特性参数,如下图定义,这个定义是开关管在感性负载下的定义,可见IGBT模块手册说明。
还是搞清楚这几个时间参数的意义,下面我们加以文字解释
**tdon:**开通延时,由栅极电压VGE的10%到集极电流的10%
tr :上升时间,由集极电流Ic的10%到Ic的90%
tdoff :关断延时,由栅极电压VGE的90%到集极电流的90%
tf :下降时间,由集极电流Ic的90%到Ic的10%
手册中的参数测定:
以上参数定义图也是根据IEC-60747-9-2007对开关特性的定义,这里是感性负载下对时间开关特性的定义
关断特性参数定义
开通特性参数定义
:
**tdon:**开通延时,由栅极电压VGE的10%到集极电流的10%
tr :上升时间,由集极电流Ic的10%到Ic的90%
tdoff :关断延时,由栅极电压VGE的90%到集极电流的90%
tf :下降时间,由集极电流Ic的90%到Ic的10%
驱动电路参数 ,通常通常脉冲变压器形式的IGBT驱动器,下式中差值基本接近零,可以忽略而对于光耦形式的驱动器,这个值差异会大一些,因为一个驱动器通常Q1和Q2是对称的,这两个差值依旧表示上管Q1和下管Q2的差值,我们还是把“ 我Q1还没有关断,你Q2就来了,这岂不是很危险的事 ”,而这里特指由驱动引起的死区时间。
驱动电路常用构架,信号经过电子器件传输后,总会存在延时和失真,并且上升和下降的延时和失真总是不太一样。 驱动器不带IGBT工作的情况,称为驱动器空载 。
例如,如下是某脉冲变压器传输信号的IGBT驱动器参数,这里tPHL_max是驱动器的关断延时tdoff,tPLH_min是指驱动器的开通延时tdon,具体定义见后面解释。
如下是某光耦传输信号的IGBT驱动器参数,如果只给了典型值,那么对评估死区时间意义并不大
其实光耦传输信号的驱动器,延时值的大比重是由光耦引起的,tPHL是指输出低电平的时间,这个其实就是关断延时
P:代表延时“Propagation”
H:代表高电平“High”
L:代表低电平“Low”
PHL可以表示为H→L,就高电平向低电平变化,这个也表述信号由高变低的过程,正好类似关断延时,只不过驱动器或者光耦定义就用tPHL定义了,同理tPLH则相反,如下是某正逻辑光耦的定义图。
正逻辑光耦:输入和输出电平保持一致,通常是输入高电平,输出就是高电平
常见正逻辑光耦:HCPL-3120和HCNW2211
tPHL:逻辑低电平输出传输延时
tPLH:逻辑高电平输出传输延时
反逻辑光耦:输入和输出电平相反,通常是输入高电平,输出就是低电平
常见正逻辑光耦: HCNW2611、6N137、PC817等
四、死区计算举例
某驱动器参数
IGBT模块手册数据
不同结温下的死区时间:
25 ℃**情况下的死区时间:**td=[(0.87-0.20+0.2)+(0.5-0.1)]*1.5=1.9us
150 ℃**情况下的死区时间:**td=[(0.97-0.21+0.23)+(0.5-0.1)]*1.5=2.1us
为了保证系统可靠,选大死区的一种结果
五、总结
(1)死区的来源是有依据可循的,掌握“ Q1还没有关断, Q2就不能开通的原则 ”死区针对上下管桥臂的直通问题。
**(2)**死区时间是多个参数的共同结果,因为开关参数本身就是器件结温、母线大小和通过电流的变量,需要熟读器件数据手册。
(3)死区时间,不仅关注实际开关特性,同时也要关注你选择的驱动器特性。
(4)结合实际死区的意义理解开关特性参数的定义。
-
电力系统方向性电流保护为什么有死区?死区由什么决定?2024-02-18 5255
-
电力系统潮流计算有哪些意义呢2021-10-26 4847
-
对电力系统计算机应用存在问题及解决方法进行了探讨2021-09-10 2199
-
基于Matlab计算程序的电力系统运行分析2021-09-02 1676
-
单相和三相电力系统潮流计算的认识 精选资料推荐2021-07-09 2287
-
基于Matlab的电力系统潮流编程如何去计算?2021-07-07 1692
-
基于matlab电力系统潮流计算相关资料分享2021-07-06 2441
-
基于Matpower的电力系统潮流计算原理及仿真设计2021-06-30 1831
-
电力系统对称短路计算的设计2020-12-28 2316
-
电力系统潮流计算的GUI2012-12-13 8209
-
开关死区对SPWM逆变器输出电压波形的影响2009-07-10 3850
全部0条评论

快来发表一下你的评论吧 !
