

国内4D毫米波雷达厂商名录
电子说
描述
4D毫米波雷达(也被称为4D成像雷达)可以实现类似于激光雷达的成像功能,而在成本方面只有激光雷达的10%-20%。那么,4D毫米波雷达在汽车自动驾驶领域是最理想的传感器吗?
传统毫米波雷达可以检测物体的水平方位角(Azimuth)、距离(Range)和速度(Velocity),在此基础上,4D毫米波雷达还能够处理俯仰方位角(Elevation)信息,即四维数据,可以说4D毫米波雷达是强化的毫米波雷达。
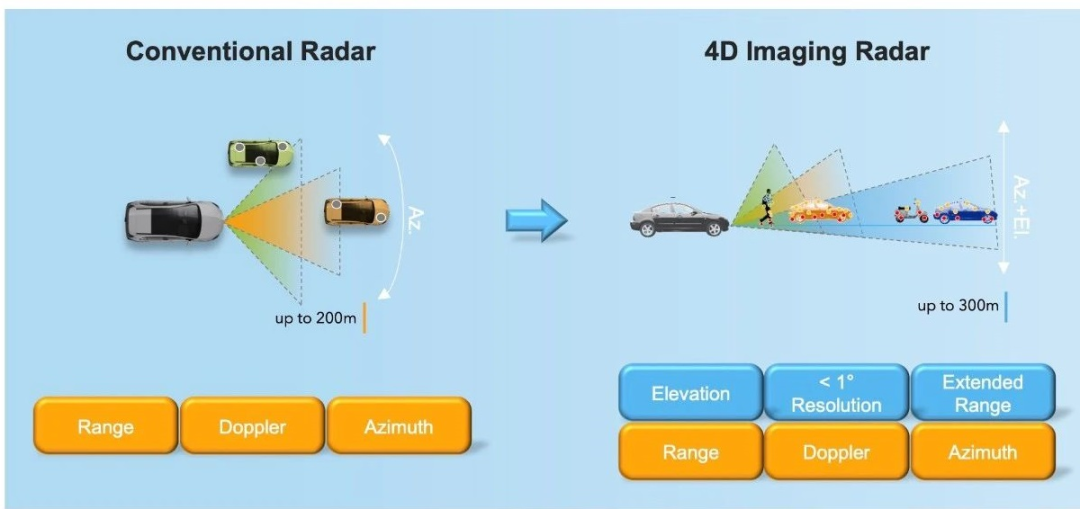
图注:4D毫米波雷达与传统雷达的区别(图片来源:NXP)
在汽车应用场景中,由于缺乏高度信息,传统雷达在视角上只有一个平面,无法区分目标物体是在“路上”还是在“空中”,这使得毫米波雷达无法有效发挥作用,尤其是在静态物体识别方面。4D毫米波雷达可以捕捉汽车周围目标的空间坐标和速度信息,还能计算目标的俯仰角信息,进而提供汽车周围的环境信息,规划出逼真的行驶路径。为了实现这一技术,通过增加实际或虚拟天线的数量,有效提高角分辨率,生成更多的点云(点云指的是某个坐标系下所有点的数据集),并进一步对目标物体的基本轮廓和形状进行成像。此外,经过深度学习,4D毫米波雷达可以区分不同的目标,例如行人、自行车、汽车、卡车等。既然4D毫米波雷达具备上述优势,那么它是否可以取代激光雷达呢?取代激光雷达?激光雷达(LiDAR)或4D毫米波雷达能否成为智能驾驶汽车的主要传感器,取决于具体场景,根据不同功能和需求开发不同的解决方案。
(1)从技术角度来看,4D毫米波雷达与激光雷达相比,不是一个数量级,前者无法取代远距离高性能激光雷达。
从点云应用来看,4D毫米波雷达虽然也具备成像功能,但在点云密度和质量方面仍无法与激光雷达的性能相提并论,难以满足高水平自动驾驶的感知需求。
在自动驾驶场景中,对前向检测精度的要求极高。当汽车向前行驶时,必须能够准确检测和识别前方物体信息,包括大小、距离、方向和速度等,任何误报或漏报都可能导致事故。LiDAR可以通过扫描周围环境,形成3D图像模型,并且可以在水平视场中每秒产生数百万个点云,其点云密度足以满足不同级别自动驾驶的感知需求。
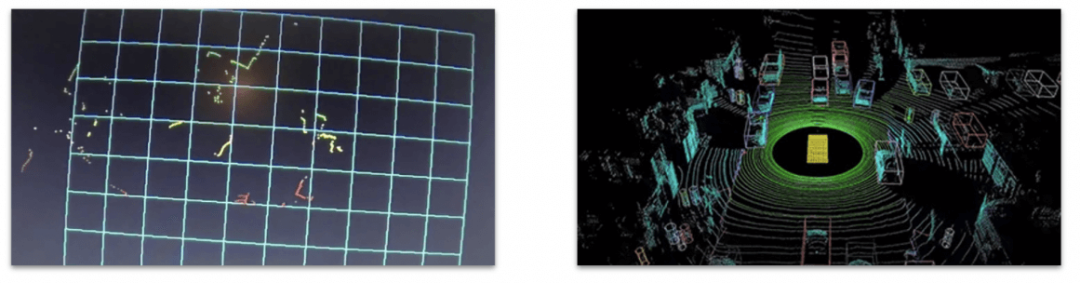
图注:点云数据被用于成像,反映汽车周围的环境(图片来源:thinkautonomous.ai)
(2)从成本角度来看,此前有一种观点认为,4D毫米波雷达未来可能会取代low-beam激光雷达,主要是成本驱动,但是在价格方面,一些4D毫米波雷达的价格并不比Flash LiDAR便宜,而且,单片4D毫米波雷达仍处于早期市场拓展阶段。
(3)而且,建立一个标准化、量产化的产品可能需要3年甚至更长时间。4D毫米波雷达比较有可能取代的应该是传统毫米波雷达,而不是激光雷达。预计4D毫米波雷达将首先以侧雷达的形式搭载到汽车上。
无论怎样,4D毫米波雷达具有潜力,根据IEEE资料,4D毫米波雷达在自动驾驶(AD)系统中显示出作为独立或辅助传感器的巨大潜力,提高动态交通环境下的感知准确性,因为它具备“在极端环境中的鲁棒性以及出色的速度和远程测量能力”。该项研究同时表明,4D毫米波雷达除了需要在点云方面增强,还需要在算法、实时性能、数据集等方面进行提升。
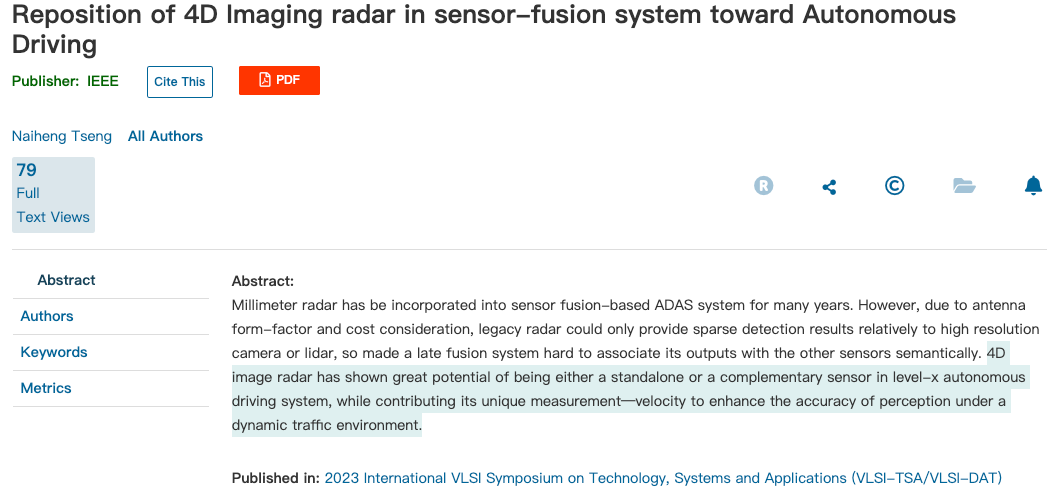
图注:研究表明,4D毫米波雷达在自动驾驶(AD)系统中可提高动态交通环境下的感知准确性(来源:IEEE)
对于自动驾驶来说,没有任何一种传感器是完美的,只有同时使用多种传感器,才能获得自动驾驶所需的精度和准确度,因此,传感器融合(fusion)或者传感器套件(suit)更为常见。那么,什么样的传感器配置符合当前L2或者L2+级别自动驾驶的需求?
“图像传感器+4D毫米波雷达”组合或将更加普遍多数汽车OEM厂商在其ADAS/AD传感器套件中,将4D毫米波雷达与图像传感器、LiDAR和其他雷达一起使用。机构Frost & Sullivan预计,“图像传感器+4D毫米波雷达”的组合可能会在大众市场的汽车中变得普遍;昂贵的LiDAR传感器被用于高档汽车以及具有L3和更高自动驾驶能力的汽车。在2025年之后,当LiDAR成本降低,才有可能与4D毫米波雷达在大众市场形成竞争。
配备L2/L2+自动驾驶功能的汽车越来越受欢迎,并需要具有成本效益的传感器提供足够准确的点云数据,将误报率降至最低,4D毫米波雷达将在这一领域表现出色。体现在性价比、可扩展性,及其技术进步的提高。目前4D毫米波雷达拥有从多个芯片组和传感器,到兼具短程、中程和长距离检测能力的单芯片解决方案,这将提高其采用率,并有可能降低ADAS传感器套件成本。
Frost&Sullivan预测,到2030年,北美和欧洲的乘用车成像雷达市场将达到约370万台。从用于L3的1到2个远程和短程成像雷达,发展到L4和L5汽车的多达5个,成像雷达可以取代传统的短程雷达(SRR)和远程雷达(LRR)。
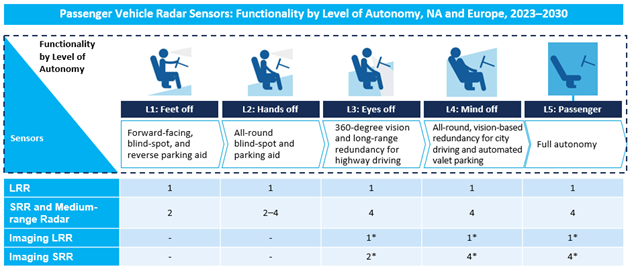
图注:2023-2030年不同级别自动驾驶使用的毫米波雷达数量(图片来源:Frost & Sullivan)
雷达传感器的主要厂商和产品1、NXP:提供完整的雷达传感器解决方案今年5月,NXP宣布蔚来汽车将部署其雷达技术,包括其4D毫米波雷达解决方案。NXP提供完整的雷达传感器解决方案,可实现汽车周边360度感知。可扩展的传感解决方案套件涵盖汽车制造商日益多样化的用例和架构,从角雷达到高分辨率4D毫米波雷达。
NXP S32R系列提供安全可靠的雷达处理能力,产品组合适用于角雷达、前雷达和4D成像雷达等用例。NXP提供4D成像雷达开发板包括4个TEF8232雷达MMIC芯片,分别可以接出12根发射天线和16根接收天线,信号在完成发射、接收、混频和采样后,通过MIPI CSI接口传输到S32R45雷达MCU上进行处理,实现一个完整的4D成像雷达检测解决方案。
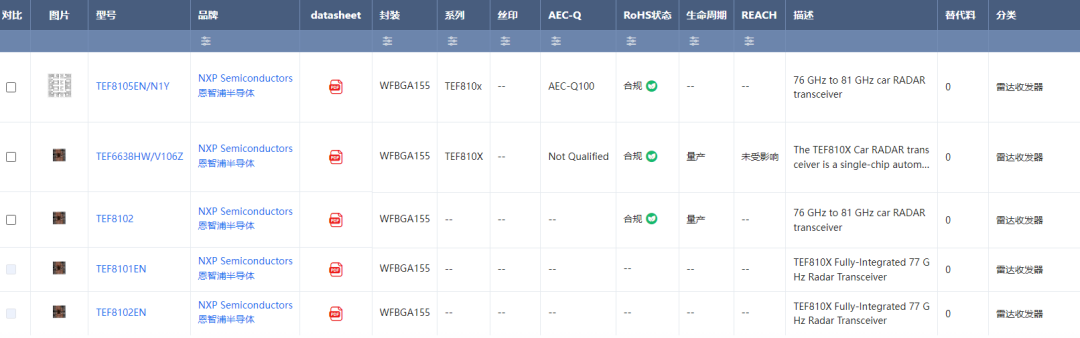
图注:NXP雷达收发器(图片来源:芯查查SaaS)
2、瑞萨电子:兼具4D毫米波雷达、ADAS SoC等简化雷达系统设计
瑞萨电子去年10月收购的Steradian是一家提供4D毫米波成像雷达解决方案的fabless公司。瑞萨电子计划依托汽车雷达市场提供的高增长机遇,借助Steradian的雷达技术扩展其汽车产品组合,并扩大其在雷达市场的影响力。由此产生的汽车雷达解决方案将结合新的汽车雷达产品、瑞萨电子用于处理雷达信号的ADAS SoC(片上系统)、电源管理IC(PMIC)和计时产品以及用于物体识别的软件,这些解决方案将简化汽车雷达系统设计,并有助于加快产品开发。产品方面,瑞萨电子SRIR256-V2是一种实时4D成像雷达系统,基于SVR4414高性能CMOS雷达收发器IC。SRIR256-V2通过级联4个SVR4414收发器,每个收发器具有4个独立的发送通道和4个独立的接收通道,采用多输入多输出配置(MIMO),实现了一流的空间分辨率。这种16个发射和16个接收器组合的布置产生了256个虚拟通道,用于对前方的水平和垂直空间进行采样。LRR模式的SRIR256-V2可以将多个独立的发射通道同相组合,最大限度地扩大范围,这有助于在远距离应用中检测250米以外的目标。
3、经纬恒润:4D毫米波雷达2024年量产
经纬恒润在研项目包含4D毫米波雷达,围绕下一代多片级联高性能毫米波雷达架构,融合MIMO阵列信号处理、雷达链路自校准、基于深度学习的目标识别等新技术,开发4D毫米波雷达,为实现L3平台毫米波雷达传感器奠定基础。预计经纬恒润的4D毫米波雷达将在2024年达到量产状态。其研发的高性能4D毫米波雷达产品采用Arbe的方案,适合于使用4D毫米波雷达替代16线激光雷达,或降低对激光雷达数量要求的客户。经纬恒润表示,部分客户可能只是想要弥补视觉方案的缺陷,这种情况下客户对于4D毫米波雷达的要求会相对较低一些,因此经纬恒润考虑研发完成48发48收、24发12收的毫米波雷达之后,再去研发相对低性能的版本。小 结目前自动驾驶从L2/L2+向L3演进,4D毫米波雷达在这个过程中具有重要的应用价值。随着进一步优化算法、降低成本以及与其它传感器进行深度融合等方面的努力,其技术优势将得到充分发挥。本文讲述了4D毫米波雷达在自动驾驶中的潜力,表明其在当前主流L2/L2+自动驾驶的传感器融合中的作用日益突显,随着供应商的产品组合增强,汽车OEM对该项技术的采纳,技术格局有可能改变。
-
本周纳瓦电子4D毫米波雷达收到主机厂定点函!2023-10-30 1899
-
对比ZF和特斯拉的4D毫米波雷达设计,国产4D毫米波雷达迅速崛起2023-07-07 3240
-
采埃孚4D毫米波雷达结构拆解分析2023-05-25 4143
-
4D成像雷达专栏 | 4D高分辨毫米波雷达概述2023-05-21 9089
-
4D毫米波雷达市场技术盘点2023-05-09 1305
-
4D毫米波雷达发展到哪一步了?国内18家供应商技术盘点2023-05-06 1697
-
什么是4D成像毫米波雷达?4D成像毫米波雷达作用解析2023-03-20 5000
-
什么是4D毫米波雷达?4D毫米波雷达与传统雷达有何区别?2023-03-13 17365
-
特斯拉确认搭载4D毫米波雷达!它为何备受车企追捧?2023-02-23 5171
-
4D毫米波雷达加速了4D成像系统的可能性2023-01-04 2457
-
什么是4D毫米波雷达?2022-07-14 14751
-
漫谈车载毫米波雷达历史2022-03-09 12074
-
拥抱自动驾驶,4D成像毫米波雷达已悄然崛起!2022-01-12 9314
-
剖析如何做好一款4D高分辨毫米波雷达2021-04-05 9592
全部0条评论

快来发表一下你的评论吧 !
