

N32L40XCL-STB开发板模块评测之CAN测试案例
描述
模块介绍
CAN 是控制器局域网络(Controller Area Network)的简称,它是由研发和生产汽车电子产品著称的德国博世(BOSCH)公司开发的,并最终成为国际标准, CAN 总线协议已经成为汽车计算机控制系统和嵌入式工业控制局域网的标准总线。
近年来,它具有的高可靠性和良好的错误检测能力受到重视,被广泛应用于汽车计算机控制系统和环境温度恶劣、电磁辐射强及振动大的工业环境。
国民技术的N32L40XCL芯片系列拥有1个CAN 2.0A/B总线接口,本次实验使用N32L40XCL-STB开发板平台进行评测CAN总线使用。
开发环境搭建
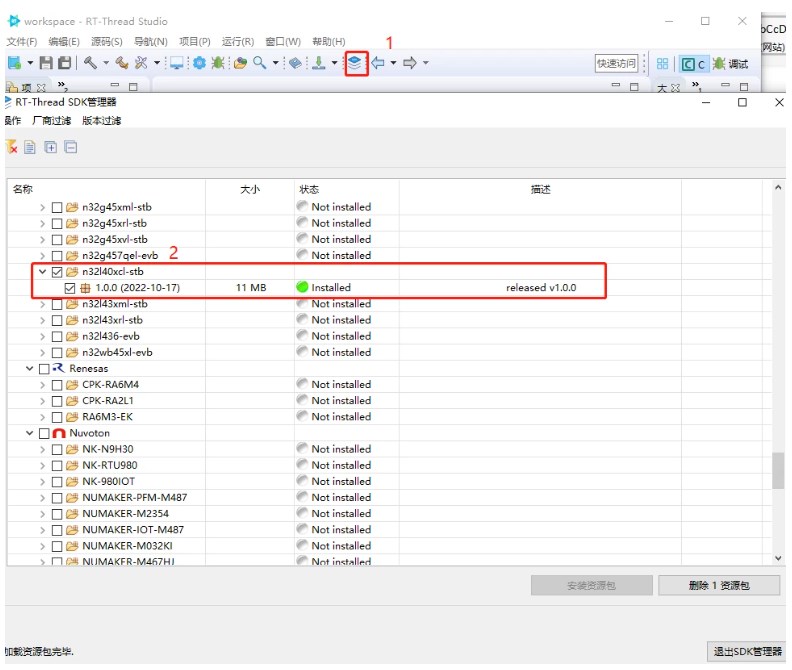
1、打开RT-Thread Studio在工具栏选择SDK Manage图标,下拉选择安装N32L40XCL-STB
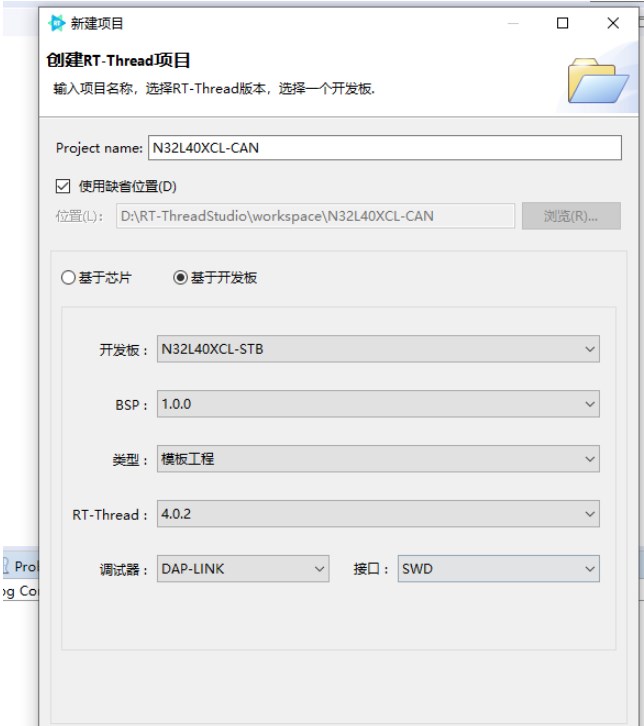
2、确认安装完毕支持包后返回首页,开始创建测试项目:文件->创建RT-Thread项目

3、在创建项目里面填写配置工程名称为:N32L40XCL-CAN。创建完成后,可以看到工程目录applications文件夹下的main.c已经帮我们创建
循环点亮LED PB5

4、创建CAN测试程序
首先我们在工程的RT-Thread Settings配置打开CAN外设

最后在applications文件夹下创建app_can.c文件

初始化can名称为”bxcan”,默认的名称可以在 drv_can.c文件里面找到

最后我们调用自动初始化接口初始化CAN测试程序INIT_APP_EXPORT(app_acn_init);
代码验证
编译成功后烧录到开发板,由于本人的CAN逻辑分析仪快递没有到,所以这里使用了逻辑分析仪查看CAN芯片发送的数据。可以看到是正确的。
初始化时候发送数据:

逻辑分析仪观察可以看到接收的数据是一致的

总结
本次评测国民技术的N32L40XCL-STB开发板中,使用RT-Thread Studio软件开发。工作量很少,基本不用编写太多代码,其他的驱动都写好。自己尽管调用即可。N32L40XCL的CAN总线非常不错,使用方便,评测通过收发数据。后续做产品可以切入使用。
-
N32L40XCL-STB开发板模块评测任务大挑战-测试CAN2023-08-16 2397
-
【N32L40XCL-STB开发板评测】I2C接口测试2023-08-11 1289
-
N32L40XCL-STB开发板模块评测任务大挑战之UART2023-08-09 1918
-
N32L40XCL-STB 开发板模块评测任务大挑战2023-03-28 1872
-
N32G45XCL-STB (LQFP48) 开发板2022-11-10 525
-
国民技术N32G45XCL-STB开发板资料2022-11-07 664
-
N32L40XCL-STB开发板硬件使用手册2022-11-02 931
-
国民技术N32G45XCL-STB_(LQFP48)开发板2022-10-18 649
全部0条评论

快来发表一下你的评论吧 !
