

机器人支撑相足端轨迹
描述
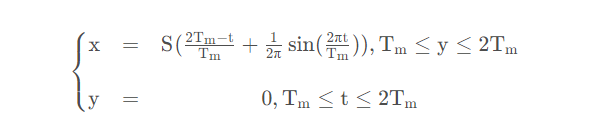
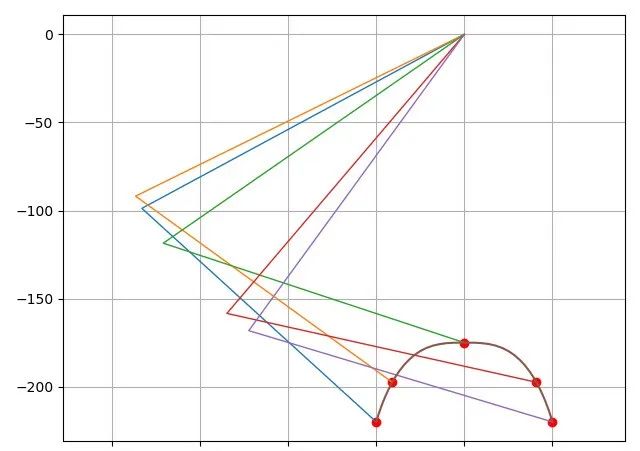
支撑相足端轨迹
相比于摆动相的足端轨迹,支撑相的设计就显得稍微简单。首先我们要知道两点:
支撑相水平方向上的位移曲线与摆动相的关于t = T m 对称。
竖直方向的位移适终为0,基于这两点,我们可以设计出如下曲线:
周期轨迹
定义步态周期为T TT,支撑相,摆动相周期均为T m ,则T = 2 T m
我们对时间进行周期化处理:
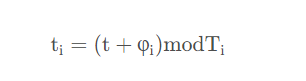
其中,t 为系统时间,t i为第i条腿的轨迹规划时间,以LF腿的相位为初始值,则φ i为各腿相位落后于LF腿的时间与步态周期的比值。
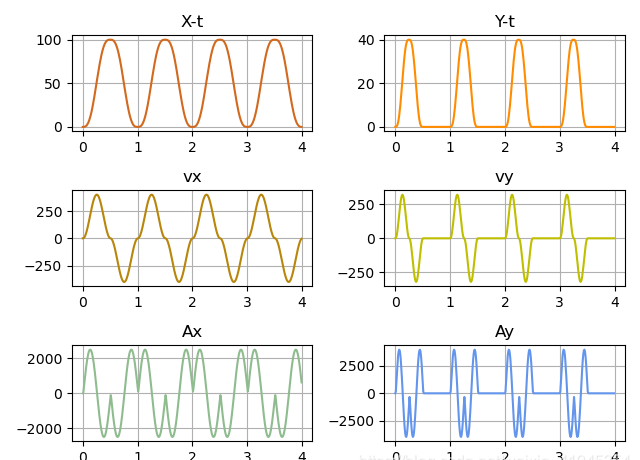

四、总结
通过对轨迹方程的改进及其图像的分析,我们最终得到了一个平滑,且冲击较小的复合摆线轨迹
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
怎么实现六足机器人的设计?2021-11-22 2474
-
如何完整的组装四足机器人?2021-09-24 3317
-
四足机器人的机构设计2021-09-15 2144
-
浅谈差速机器人的纯轨迹跟踪仿真2021-09-01 1593
-
求六足机器人的图纸2019-03-26 4048
-
四足机器人2018-09-29 10735
-
【NUCLEO-F412ZG申请】六足仿生机器人2016-11-14 3317
-
四足仿生机器人2016-08-19 6467
-
ColorSky双足机器人开源项目2016-04-21 10646
-
什么是龙人四足机器人?2016-03-24 9065
-
【Embedded Pi申请】六足机器人的创新研发2015-11-25 3133
-
stm32红外六足机器人2014-03-27 10625
-
双足机器人2013-11-25 3280
-
六足机器人2013-06-06 3867
全部0条评论

快来发表一下你的评论吧 !
