

3d激光SLAMLIO-SAM框架介绍
描述
LIO-SAM的全称是:Tightly-coupled Lidar Inertial Odometry via Smoothing and
Mapping
从全称上可以看出,该算法是一个紧耦合的雷达惯导里程计(Tightly-coupled Lidar Inertial
Odometry),借助的手段就是利用GT-SAM库中的方法。
LIO-SAM 提出了一个利用GT-SAM的紧耦合激光雷达惯导里程计的框架。
实现了高精度、实时的移动机器人的轨迹估计和建图。
本篇博客重点解读LIO-SAM框架下IMU预积分功能数据初始化代码部分
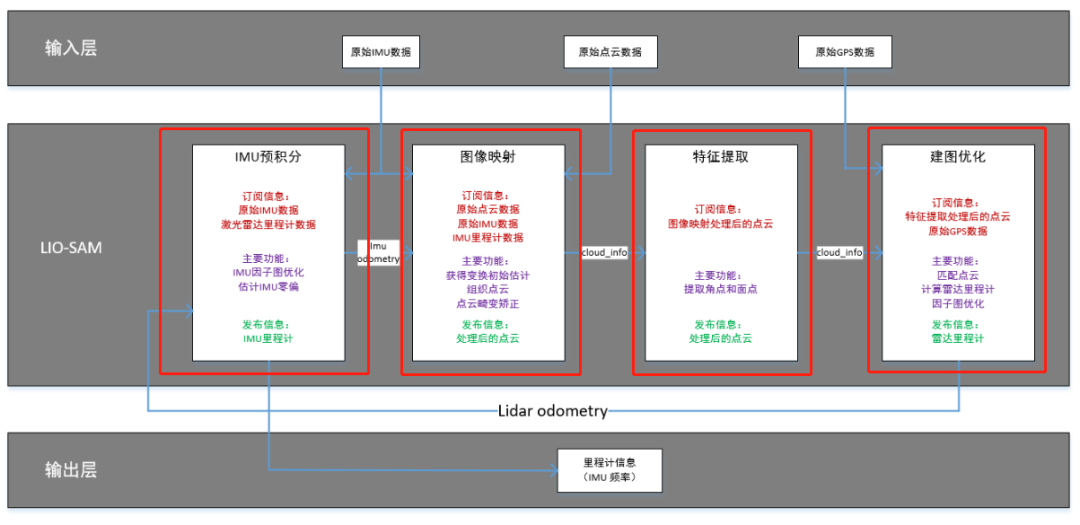
LIO-SAM 的代码主要在其主目录内的src文件夹下的四个cpp文件,分别是:
featureExtraction.cpp
imageProjection.cpp
imuPreintegration.cpp
mapOptmization.cpp
每个cpp文件是一个独立的ROS节点,对应着下图的四个模块
lio-sam的所有文件即对应功能在下面做了如下总结:
lio-sam:│ CMakeLists.txt #项目工程配置文件,可以知道作者用了哪些第三方库及cpp生成了什么执行文件
│ LICENSE #软件版权
│ package.xml #ROS包配置文件
│ README.md #项目工程说明文件:文件构成、依赖、运行等
│ ├─config│ │ params.yaml #参数文件
│ │ │ └─doc #存储效果图、流程图、论文等
│ │ │ └─kitti2bag #将kitti数据集转换成bag格式
│ kitti2bag.py│ README.md│ ├─include│ utility.h #参数服务器类,初始化参数;各类公用函数
│ ├─launch│ │ run.launch #总运行launch文件
│ │ │ └─include #分模块运行文件
│ │ module_loam.launch│ │ module_navsat.launch│ │
module_robot_state_publisher.launch│ │ module_rviz.launch│ │ │ ├─config
#存储rviz参数文件和机器人坐标系参数
│ │ rviz.rviz│ │ robot.urdf.xacro│ ├─msg│ cloud_info.msg #自定义ROS数据格式
│ ├─src #源文件
│ featureExtraction.cpp #提取雷达线面特征,发布雷达点云
│ imageProjection.cpp#订阅提取的雷达点云、IMU数据和IMU里程计数据,对雷达做畸变矫正,进行雷达前端里程计位姿粗估计的发布(以IMU频率)
│ imuPreintegration.cpp#IMU预积分,订阅雷达里程计和IMU数据,估计IMU偏置,进行雷达里程计、IMU预积分因子的图优化,输出IMU里程计。
│ mapOptmization.cpp #订阅雷达前端信息、GPS信息,进行点云配准,进行雷达里程计、全局GPS、回环检测因子的图优化。
│ └─srv save_map.srv
本篇主要解读 IMU预积分部分代码,也就是
imuPreintegration.cpp#IMU预积分,订阅雷达里程计和IMU数据,估计IMU偏置,进行雷达里程计、IMU预积分因子的图优化,输出IMU里程计。
-
3D测量使用的labview框架2015-06-04 19654
-
【LeMaker Guitar申请】3D激光扫描仪2016-01-18 3341
-
3D混合制造技术介绍2019-07-08 2252
-
自制低成本3d激光扫描测距仪激光雷达2020-05-27 4639
-
自制低成本3D激光扫描测距仪(3D激光雷达)2021-03-04 7031
-
3D激光测量技术的发展及其应用2012-01-10 2423
-
3D打印与激光制造的介绍及其关键技术与核心装备的分析2017-10-09 1474
-
关于3D激光相机的工作原理2020-08-31 33597
-
3D打印的MINI激光雕刻机资料合集免费下载2020-11-06 1815
-
3D激光雷达和相机校准是如何考虑传感器之间误差的?2021-05-26 6683
-
3D激光雷达SLAM技术的应用趋势2022-03-21 6580
-
3D打印mini激光雕刻机2022-06-01 1026
-
3D Flash 激光雷达测绘和手势识别2023-01-05 2633
-
基于LeGo-LOAM框架的3D激光SLAM技术2023-06-29 1622
-
3D三维激光扫描机的原理和特点2023-08-29 4540
全部0条评论

快来发表一下你的评论吧 !
