

什么是机器人最优控制和逆最优控制
描述
机器人在执行期望目标任务时,我们希望机器人能精确地达到人类所预设的目标,那么我们就来理解下什么是最优控制和逆最优控制。
因此,最优控制是期望最小化或者最大化目标。
很显然最优控制和逆最优控制是一种相反的关系:
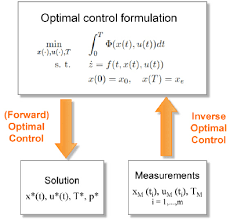
最优控制理论是数学优化的一个分支,它处理在一段时间内为一个动态系统找到一个控制,使目标函数得到优化。目标是找到目标控制律,使得优化目标函数。
而逆最优控制作为将生物运动传递给机器人的有前途的方法。逆最优控制有助于(a)理解和识别基于测量的生物运动的潜在最优标准,以及(b)建立可用于控制机器人运动的最优控制模型。
逆最优控制问题的目的是确定——对于给定的动态过程和观察到的解——产生解的优化准则。从数学的角度来看,逆最优控制问题是困难的,因为它们需要解决最优控制问题中的参数识别问题。
在最优控制中,总的来看,其本质就是让系统以某种最小的代价来让系统运行,当这个代价被定义为二次泛函,且系统是线性的话,那么这个问题就称为线性二次问题,设计的控制器(即问题的解)可以称为LQR(Linear Quadratic Regulator)线性二次调节器。
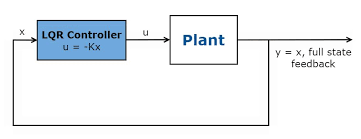
若被动系统是线性化表示,成本函数描述为二次泛函,那么这种问题就可以被认为是线性二次问题,求解此问题,即可以成为LQR问题!
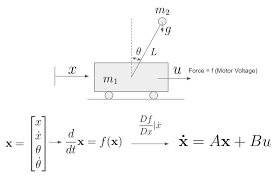
常见的模型为倒立摆模型:
寻找模型的最佳参数的问题被转化为一个 LQR 问题,该问题最大限度地减少了人力并优化了闭环行为。
LQR 控制器的系统具有良好的稳定性,并且在某个性能指标方面是最佳的。然而,当系统高度不确定时,LQR 控制不能保证鲁棒稳定性。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
LQR控制算法之最优控制2023-05-19 5939
-
直线二级倒立摆系统的H∞鲁棒最优控制2018-03-06 1439
-
基于Legendre伪谱法的空间机器人姿态运动的最优控制2018-01-31 932
-
基于最优控制的舰空导弹垂直发射技术_孙有田2017-03-15 1284
-
基于模糊控制的双馈风力发电最优控制策略_杨文焕2017-01-31 1232
-
单Buck型逆变器状态反馈线性化最优控制_陈江辉2017-01-07 1151
-
基于80C196MC交流电机V_F变化的最优控制2016-04-15 761
-
最优控制系统设计2016-04-13 451
-
0038《最优控制理论》科学出版社-2003.pdf(5M)2012-12-16 2412
-
最优控制在直流调速系统中的应用2011-06-15 751
-
状态时滞系统的输入多采样最优控制2009-08-10 847
-
大纯滞后对象的最优控制2009-06-15 837
-
主动队列管理建模及最优控制策略2009-05-25 707
全部0条评论

快来发表一下你的评论吧 !
