

力传感器行业专题研究:国内企业正逐步替代外资
描述
01
力传感器是力控的关键部件,六维力传感器测量最为全面精准
1.1 六维力传感器是维度最高的力觉传感器
力觉传感器,顾名思义就是感知并度量力的传感器。按照测量维度,力觉传感器 可以分为一至六维力传感器。能测几个维度,它就是几维力传感器。最常见的是 一维、三维和六维力传感器,二维和五维的力传感器较少。
(1) 一维力传感器:如果力的方向和作用点是固定的,此时可以选择用一维 力传感器进行测量。我们可以通过安装定位,使被测量力 F 的方向完全 与标定坐标轴(OZ 轴)重合,这样就可以对力进行精确测量。代表产品 有称重传感器、压力传感器等。当力的方向与传感器的测量轴线平行但 不重合,此时传感器的测量结果将会出现较大的误差。
(2) 三维力传感器:如果力 F 的作用点 P 始终与传感器的标定参考点 O 保持 重合,力 F 的方向在三维空间中随机变化,那么用三维力传感就能完成 测量任务。因为被测量的力可以分解为三维力传感器标定坐标系下的三 个正交分量(Fx、Fy、Fz),三维力传感器的三个测量单元可以分别对 其进行测量。当力的作用点远离传感器,这个力在经过正交分解并平移 至三维力传感器的校准中心后,传感器既要承受力 Fx/Fy/Fz 三分量的作 用,又要承受 Mx/My/Mz 三个弯矩的作用,这种情况下,三维力传感器 的测量结果将会出现较大偏差。
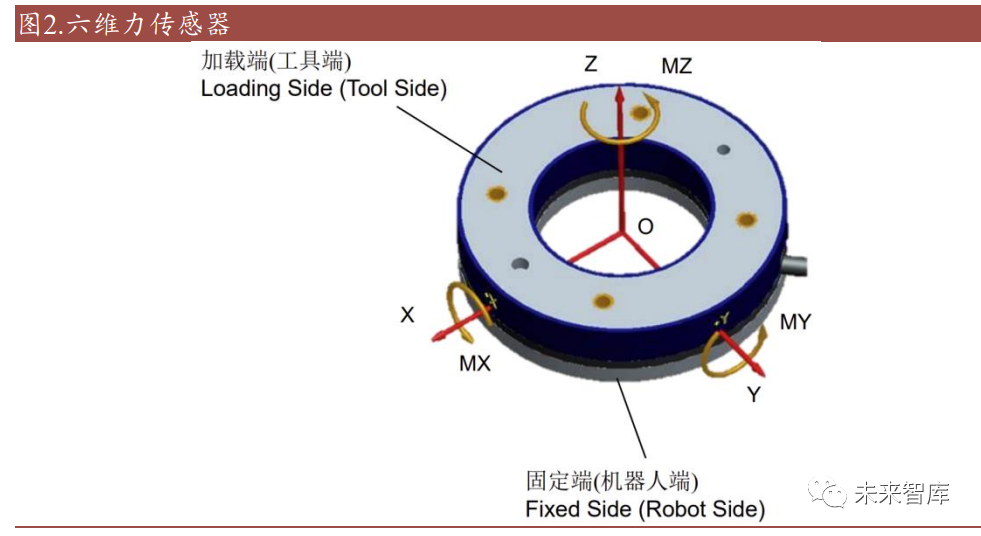
(3) 六维力传感器:如果力的方向和作用点都在三维空间内随机变化,此时 应该选择用六维力传感器进行测量。因为空间中任意作用点上的力可以 在六维力传感器的标定坐标系内,分解为沿标定坐标轴的三方向分力 (FX、FY、FZ)和绕标定坐标轴的三方向力矩(MX、MY、MZ)。这 类传感器更适用于参考点的距离较远,且随机变化情景,测量精度要求 较高。
六维力传感器是维度最高的力觉传感器,它能给出最为全面精准的力觉信息。六维力传感器,又叫六维力/力矩传感器、六轴力传感器、F/T 传感器,是一种特 殊的力传感器,能够同时测量中性坐标系(OXYZ)内的三个力(FX、FY、FZ) 和三个力矩(MX、MY、MZ)。六维力传感器一般分成固定端(机器人端)和 加载端(工具端),传感器的内部算法会解耦各方向力和力矩间的干扰,使力的 测量更为精准。
根据传感元件的不同,六维力/力矩传感器主要分为: 应变片式、光学式以及压 电/电容式。目前,市场应用的六维力/力矩传感器大部分是基于应变式的测量。基于压电、电容和光学等原理测量的传感器有一定的理论研究和实验,下游尚未 得到广泛应用。每种类型的六维力传感器都具有其独特的优点和适用范围,随着相关研究的不断深入,不同测量机理的传感器将会发挥自身优势被应用到各种场 合,进而推动六维力传感器向多元化方向发展。
经过对稳定性、刚度、动态特性、成本与信噪比五个维度的比较,硅应变传感 器综合性能优异。硅应变片的稳定性、信噪比、动态特性要好于金属应变片,刚 度上两者差异不大,成本上金属略优,但这几年硅应变片的工艺有了提升和改进, 综合成本也在大幅降低。
六维力/力矩传感器的研发难度非常大。它不是三个一维力传感器和三个扭矩传 感器结构的简单叠加,它的非线性力学特征明显,要考虑多通道信号的温漂、蠕 变、交叉干扰、数据处理的实时性,再加之六维联合加载标定的复杂性 ,六维 力传感器的技术难度可谓是一维力传感器难度的六次方。
六维力传感器面临两个关键技术问题:全方位机械过载保护和动态性能。机械 过载保护是指作用到传感器的力超过某一数值时,为避免传感器损坏而增加的一 种附属结构。国内外学者也提出了基于不同结构的机械过载保护装置,但由于保 护装置结构复杂且加工精度要求较高等限制,生产出具有全方位机械过载保护装 置的六维力传感器的成熟产品仍有难度。传感器性能指标包括静态性能指标和动 态性能指标。在实际的力测量过程中,被测信号大多是动态信号,如机器人打磨 抛光时的接触力、物体高速运动过程中的称重和炮弹发射过程时的后座力等信号, 这些信号属于快速时变信号,动态性能较差的传感器很难跟踪测量这些信号,所以必须在充分了解传感器的动态性能后方能选择合适的传感器来进行测量。
除了优化自身结构、形状等方法提高动态性能外,一些国内外学者利用动态补偿滤波 器、遗传算法、神经网络算法等智能算法来提高传感器的动态性能,取得了良好 的效果。国外对六维力/力矩传感器的研究起步较早。国内外学者对六维力传感器结构都 做了大量的研究与改进,目的是提高传感器的灵敏度和抗过载能力,减少维间耦 合误差,改善动态性能,从而更好地辅助机器人实现智能化控制。
1.2 力传感器是机器人实现主动柔顺控制的核心部件
六维力测量技术属于平台型技术,根据应用场景的环境、载荷、安装、通讯、算 力、动力学特性等需求不同,在不同的应用领域,六维力传感器的产品形态和技 术特点也有较大区别。目前,六维力传感器主要应用于汽车行业的碰撞测试、轮 毂、座椅等零部件测试以及航空航天、生物力学、医疗领域、科研实验、机器人 与自动化等领域。
在汽车领域,六维力/力矩传感器被广泛地用在汽车部件和系统级测试、发动机 和动力总成测试、车辆和试验厂测试、总装和最终测试。它们在确定新车和部件 设计的完整性和优化方面都能发挥重要作用,同时还有助于保证效率、安全性和 正确的功能。航空航天领域是六维力传感器最早的重要应用领域之一,可用于测量风洞试验、 飞机、卫星、火箭等飞行器各种运动状态下的六维力信息,通过这些信息,飞行 器可以更加准确地感知环境,控制姿态,完成各项任务。随着航空航天技术的不 断发展和应用的深入,六维力和力矩传感器还可以用于飞机制造、飞行器着陆和 起飞过程的监测、机械臂控制、结构健康监测等领域。六维力传感器的应用能够 提高航空航天系统的性能、安全性和可靠性。
在医疗手术和康复领域,手术机器人的力感知可作为力反馈的依据以提升手术的 安全性。根据临床场景的不同,手术机器人主要分为腔镜机器人、骨科机器人、 穿刺机器人、经自然腔道机器人、泛血管机器人等五类机器人。目前,协作机械 臂+六维力传感器的组合已广泛应用于血管介入手术机器人、外科手术机器人、 医疗检测机器人及远程操控机器人等;中国手术机器人行业处于早期发展阶段, 增长潜力较大。根据 GGII预计,未来 3-5年,骨科机器人和泛血管手术机器人将 占手术机器人市场的 20%以上。随着技术的不断进步和应用的深入,六维力传感 器在医疗领域的应用前景将会更加广阔,六维力传感器产品将逐渐成为类似应用 场景中的刚需。
柔顺控制可解决很多传统位置控制难以解决的问题,有利于扩展机器人的功能。在许多交互任务中需要机器人与对象或环境发生接触,两者接触时,会在接触面 之间产生相互作用力,只靠位置控制可能导致很大的误差。由于采用位置控制的机器人可通过结构化环境的设置,依靠快速、精准的位置控制预设编程完成“固 定轨迹”的任务。而在执行接触任务时,末端执行器与规划轨迹之间的微小偏差 就可能导致机械臂与物体表面脱离接触或在接触面上施加过强的压力;对于机器 人的高刚性结构,微小的位置误差可能会导致非常大的作用力甚至灾难性的后果。所以为了实现交互任务,机器人需要表现出柔顺性。柔顺力控主要是从力传感器 获得力信号,再将其转化为机器人的控制信号,使机器人响应此信号而动作。
人机协作要以机器人的柔顺控制作为前提。当与机器人产生交互的外界环境发生 改变,机器人应对这种改变产生顺应性变化,这就是所谓的柔顺性。如让机器人 末端执行器在受到环境扰动时能保持与环境的恒定接触力,或是机器人顺应操作 人员施加的外部牵引力,以运动到操作人员期望的位置。柔顺控制主要分为主动柔顺控制和被动柔顺控制。被动柔顺控制主要依靠一些机 械装置(如减震器、弹簧等)使机器人表现出对环境的柔顺特性,主动柔顺控制 依靠控制策略令末端产生需要的刚度、阻尼或力作用以达到柔顺的目的。在实际 应用中,仅有少数的机器人在与环境接触中具有非常有限的主动柔顺能力。
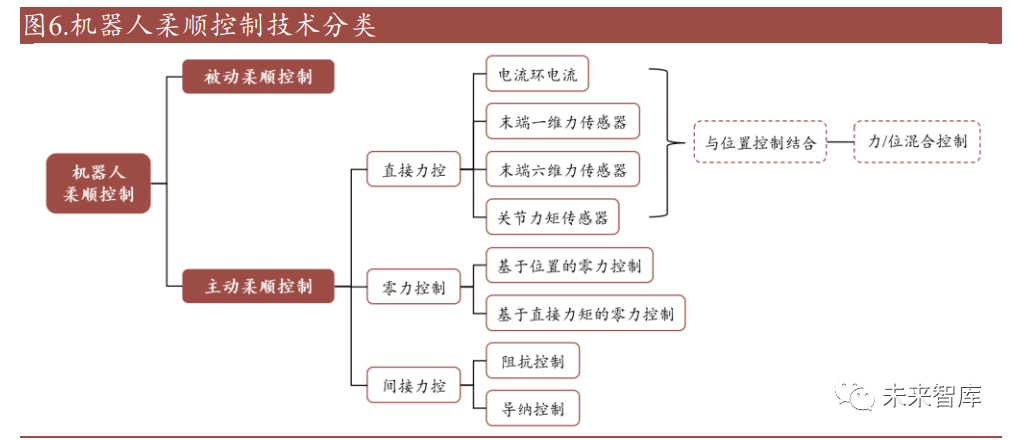
(1) 被动柔顺控制:借助某些机械装置的物理上的柔顺性,对接触力产生被动 的适应。如弹簧、阻尼等构成的柔顺装置,可以靠弹簧形变吸收或者阻尼损 耗机器人与环境产生接触时产生的能量。但当前被动柔顺控制方法在应用效 果上仍存在着多种不足,如结构刚度降低、机器人关节的重量增长、结构的 复杂性增加。在此背景之下,主动柔顺控制则成为了现今研究者们开展柔顺 控制研究的首要方式。
(2) 主动柔顺控制:需要机器人获取对力信息和位置信息的反馈,利用力与位 置的反馈信息结合相应算法去主动控制机器人运动或者作用力。机器人实现 主动柔顺控制的方式主要有力/位混合控制、零力控制和阻抗控制这三种控 制理论。
力/位混合控制:这种理论模型有位置反馈环和力反馈环,机器人在进行任 务的过程中,可以把机器人末端执行机构的工作空间分解为位置、力两个相 互正交且独立的子空间。在力空间内,通过力控制方法确保实际接触力最大 程度的接近期望接触力;在位置空间内,通过位置控制方法保证机器人能够 沿期望轨迹运动,通过力和位置控制策略协同作用实现机器人对末端作用力 的主动柔顺控制过程。
零力控制:直接示教又称拖动示教是目前人机协作的主要方式之一,即人 类操作者直接通过手动拖动机器人来进行示教任务。而零力控制便是实现机 器人拖动示教的最核心技术。目前零力控制主要有两种实现方法:基于位置 的零力控制以及基于直接力矩控制的零力控制。
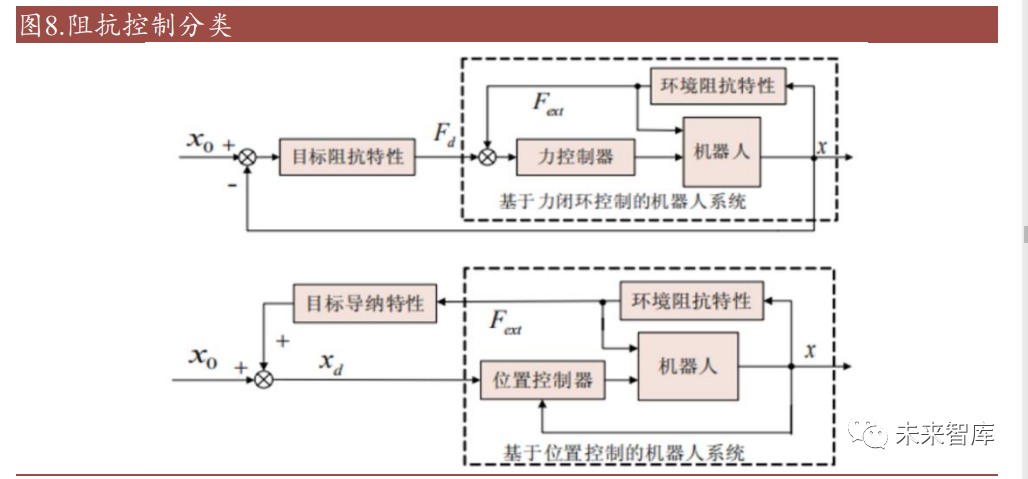
阻抗控制:根据机器人末端执行器的位置(或速度)和接触力之间的对应 关系,通过控制器调整位置(速度)误差或刚度系数来控制机器人末端执行 器的接触力。阻抗控制理论根据控制原理可以分为基于位置的阻抗控制(导纳控制) 和基于力的阻抗控制。
六维力/力矩传感器是机器人实现柔顺化、智能化操作的关键传感设备。只具有 位置反馈将难以满足柔顺控制的需要,在机器人控制中加入力反馈环节势在必行。机器人力觉传感器是模仿人类四肢关节功能的机器人获得实际操作时的大部分力 信息的装置,是机器人主动柔顺控制必不可少的,它直接影响着机器人的力控制 性能。在机器人力控解决方案中,目前应用最为广泛的力觉传感器就是六维力传 感器。
目前,六维力传感器主要用于检测、预防、控制、示教、测量、保护等场景,通 常安装在机器人的底座或者末端,可以提供应用过程中的力交互信息,对于下游 客户而言有效且可靠的数据至关重要。
未来,人形机器人力控技术的发展将呈现出多信息融合(触觉、力觉和视觉等), 主要通过配备(AI、视觉、力觉传感器等)传感器得以实现,尤其在手腕、脚踝关 节等处更适用六维力矩传感器,这将为六维力传感器在人形机器人领域的应用 带来巨大的发展空间。
1.3 力传感器与电流环的区别
目前市面上绝大部分执行器的力控方式分为两种:一为电流环力控,一为传感 器闭环力控。电流环力控是一种比较容易实现的常规力控方式,主要通过调节电 机内部电流大小实现力控,实现难度较低,可以实现 5%-15%精度范围内力控;但其运动速度慢,不能反向传动,无法满足一些精度要求更高的场景需求,使用 一段时间后,机械磨损会带来误差,精度进一步降低。电流环适用于直驱电机 (Direct DriveMotor) 或者带小减速比 (Reduction Ratio 《 10)的应用场景,诸如小型 阻抗控制的人机交互的机械臂和小型四足等。
电流环以提高电流的稳定性能来提高系统性能,是一种将输出电流采用正反馈 或负反馈的方式接入处理环节的方法。环路间相互作用,对信号进行汇总、分析、 修正,实现精准的运动控制。当力矩来到减速器端并尝试推动减速器反向转动时,由于静摩擦力的作用,减速 器无法转动。因而需要继续增大外力矩直至超过减速器的最大静摩擦力,减速机 转动并推动电机转子的运动,此时电流环才感知到外力矩。进一步,电流环通过 电流反馈和辨识的动力学模型估计外力。
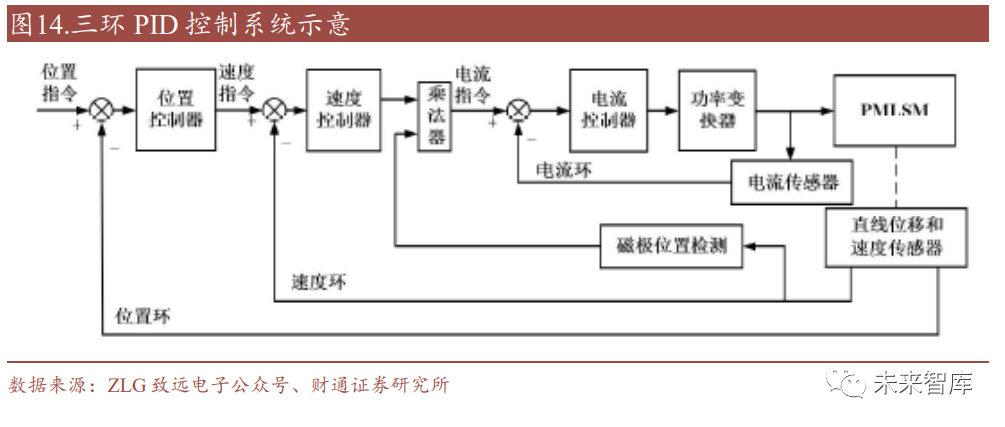
电流环根据实现原理,分为开环力控和闭环力控两类。开环力控直接让机器人工 作在力矩模式下,电机提供机器人运动所需的重力,摩擦力,惯性力等。这样用 户只需很小的外力即可让机器人按照所需的轨迹运动。闭环力控会存在如下一个 力反馈回路,它通过算法估计出用户的牵引力矩, 再通过阻抗控制,让电机输 出一个辅助力矩,帮助用户拖动机器人,完成示教工作。由于反馈回路的存在, 它对机器人建模和系统辨识的精度要求较低。电流环一般处在运动伺服系统(三环控制系统)中最内层,向外依次为速度环 和位置环,这三环构成 3 个闭环负反馈 PID(比例、积分、微分)调节系统。最内的 PID 环就是电流环,电流环是控制的根本,任何模式都必须使用。此环完全 在伺服驱动器内部进行,通过霍尔装置检测驱动器给电机的各相的输出电流,负 反馈给电流的设定进行 PID 调节,从而达到输出电流尽量接近等于设定电流,电 流环是控制电机转矩的,所以在转矩模式下驱动器的运算最小,动态响应最快。环路间相互作用,对信号进行汇总、分析、修正,实现精准的运动控制。伺服 电机可以将电压信号转化为转矩和转速,按照位置、力矩或速度指令精确地控制 机械系统运动,内嵌的编码器将伺服电机的运动参数反馈给伺服驱动器,完成闭 环控制。
电流环、力矩传感器/六维力传感器均是实现对机器人的自适应柔性控制的方案。就二者对比而言,电流环其优点在于成本低,不需要额外的传感设备,而缺点在 于精度较低,响应较慢,适用场景有限。力矩传感器是性能更佳,但成本相对更 高的方案。响应精度和速度上,电流环力控比力矩传感器要低。力矩传感器感知中,施加在 连杆上的外力能够直接传导到传感器上,而电流环感知则是力矩通过传感器后, 持续向后传递到减速器端,当外力矩增大到超过减速器的最大静摩擦力时,减速 器转动再向电机传导信号,电流环才能够感知到外力矩。由于减速器的静摩擦力, 需要较大的外力,电流环才能检测到外力变化,而力矩传感器能够较快地检测到 外力的变化。
从应用场景来说,电流环力控更适合应用于低精度要求场景,力矩传感器性能 则更为领先。电流环力控的弊端是机械臂的减速比要比较小,轻负载,精度差 (低精度要求场景下的协作机器人可能运用)。力矩传感器/六维力传感器控制精 度好,感知精度高,完全独立,控制的电流波动都能感觉到。
02
力传感器市场有望持续增长,欧美日韩占据主导地位
2.1 力传感器市场规模超过 150亿美元,我国六维力矩传感器市场尚小
根据 Modor Intelligence 数据,2020 年力传感器市场价值为 151.21 亿人民币。根 据 Modor Intelligence 预测,2026 年力传感器市场价值将达到 198.49 亿人民币, 2021-2026 年预测期间的复合年增长率为 4.63%。力传感器已成为工业机器人的 关键特性,使它们能够与任务无关并与人类一起安全地运行。这些传感器改进了 联网嵌入式系统的监控和管理。自动化的采用已经改变了全球格局,因为这些传 感器已成为所有自动化设备的关键,在所有操作中提供准确性和精度。
目前市场上的力传感器产品组合在产品供应方面非常标准化。尽管市场具有满 足大量应用的潜力,但市场参与者的产品非常有限。
数据显示,2022 年中国市场六维力/力矩传感器机器人行业销量 4840 套,同比增 长 62.58%;2022 年中国六维力/力矩传感器机器人行业市场规模 1.56 亿元,同比 增长 54.35%。目前,六维力和力矩传感器市场基数依然偏小,尚未形成明显规 模效应。随着入局者的持续增加,叠加下游细分市场认知的逐年提升以及应用领 域的拓展,六维力和力矩传感器有望进入高速成长期,期间将伴随多技术路线产 品矩阵的完善、产品价格的下降以及国产化率的提升。
2.2 国外企业占据六维力传感器核心市场
多维力矩传感器的技术壁垒较高,美日企业先发优势明显,国内仍处产业早期。因技术壁垒较高,国内可量产的企业较少,美日企业先发优势明显。从代表企业 分布来看,全球六维力/力矩传感器主要分为日韩品牌、欧美品牌和国产品牌三 大阵营。各阵营企业呈现不同的配套特点,日韩地区六维力/力矩传感器厂商主要配套当 地机器人本体厂商,其中,韩国企业 Robotous、Aidin Robotics 主要合作厂商包 括 Doosan Robotics、Neuromeka 和 Rainbow Robotics;日本企业 Sintokogio 和 WACOH-TECH 主要合作厂商包括发那科、电装、三菱、那智不二越、安川等。
欧美地区六维力/力矩传感器厂商可分为两类:一类是传统的传感器生产商,包 括 ATI、Bota Systems AG、ME-Meßsysteme GmbH、AMTl、Kistler 等;另一类是 全球知名的机器人末端工具生产商,主要有 SCHUNK、OnRobot、Robotiq 等, 欧美地区厂商合作企业以协作机器人本体厂商为主,主要包括优傲机器人、达明 机器人和欧姆龙等。受益于机器人市场需求催化,中国六维力(矩)传感器市场近年来入局者逐年 增加,但受限于该领域的高技术壁垒,真正具备批量化产品供应能力的厂商依 然偏少。目前,国产六维力/力矩传感器与外资主流传感器在灵敏度、串扰、抗 过载能力及维间耦合误差等方面仍存在差距。近几年,入局六维力/力矩传感器领域的国产相关厂商越来越多,除了宇立仪器(SRI)之外,如坤维科技、鑫精诚、海伯森、蓝点触控、神源生智能、瑞尔特测控等,均已有相关的产品落地并 进入产业化应用。其他厂商如重庆鲁班机器人技术研究院、昊志机电、埃力智能 等,通过自主研发力传感器技术,已经具备六维力/力矩传感器的生产能力,部 分产品型号开始进入下游用户的验证测试阶段。
根据 2022 年国内市场销量口径看 ATI、宇立仪器、坤维科技、鑫精诚位于第一 梯队,各家厂商下游应用的侧重有所差异。ATI 作为全球龙头,经过多年的积累, 应用面相对更广;宇立在工业机器人磨抛行业和汽车碰撞测试行业应用更多;坤维科技在协作机器人、医疗手术机器人、医疗检测机器人和康复机器人域具备明 显优势,同时其产品在航空航天领域具备行业核心竞争力;鑫精诚凭借苹果供应 商的身份已将其产品推入到 3C 行业,同时在机器人行业和医疗行业也有布局。
智研咨询测算,2022 年海外进口抛光打磨机器人产品数量占总装机量比例约为 55.9%,近年来这一比例一直呈下降趋势。国内厂商凭借价格优势,以及研发创 新,正逐渐获得市场话语权。
(1) ATI,ATI 成立于 1985 年,在美洲、欧洲和亚洲等地曾拥有超过 3,700 名员工,2005 年 营业额为 22 亿美元,是一家专门设计与销售适用于个人电脑的显示卡、图形处 理器、芯片组、机顶盒、数字电视、电子游戏机和手提式设备等的无厂半导体公 司。ATI 多轴力/力矩传感器系统测量全部六个力和力矩。系统包括一个传感器,高柔 性屏蔽电缆,智能数据采集系统,Ethernet/DeviceNet连接或 F/T控制器。力/力矩 传感器被广泛的应用与各个工业领域,如产品测试,机器人装配,打磨和抛光等。在研究领域被用于外科手术机器人,仿生机器人,康复机器人,以及神经学等其 他不同的应用中。
(2) ROBOTOUS,ROBOTOUS 是一家位于韩国城南市的专业机器人技术公司,成立于 2004 年。公 司商业领域含有机器人业务和微泡业务,机器人业务涉及电容式 6轴力/扭矩传感 器、国防部无人搜索车遥控系统、移动机器人平台(自动驾驶)、机器人自动化 系统、智能工厂(制药、口罩工厂等)、其他应用产品开发(ODM、OEM)和 服务。基于创新的 F/T 传感器技术,ROBOTOUS 将成为智能工厂和协作机器人应用的 主要传感器供应商。ROBOTOUS 标准模型阵容将通过增加一个迷你型和两个高 扭矩容量的模型来扩大。F/T 数据分析解决方案将在静力学、人工智能技术、用 户界面的基础上得到加强,使公司的客户能够轻松、快速地使用高级 F/T 传感器 技术。ROBOTOUS 已经开始与一个协作型机器人制造商合作开发三种类型的关 节扭矩传感器。
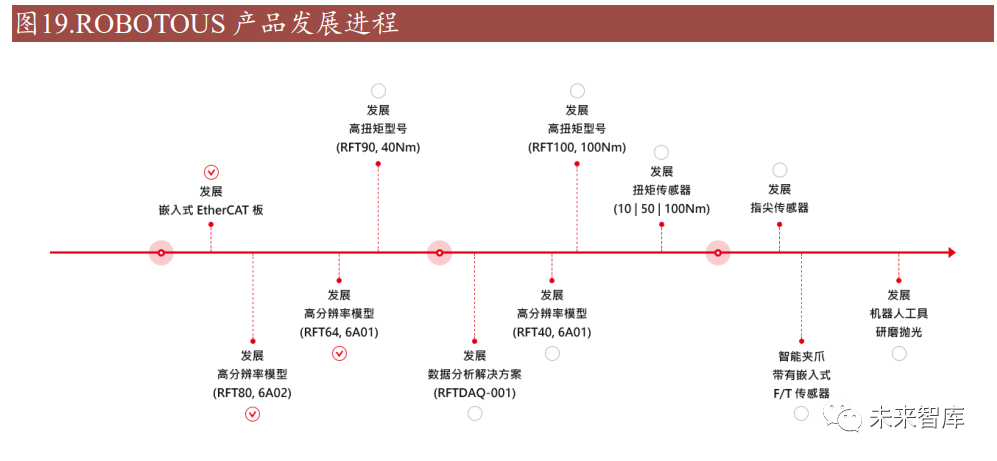
公司的 6 轴力扭矩传感器(RFT 系列)提供了最精确的力和扭矩测量。由于是电 容型传感器的特性,RFT 系列是最耐用和最具性价比的传感器,同时承诺良好的 数据读取能力。与电阻、光学等其他类型的力扭矩传感器相比,非接触式传感结 构具有超乎想象的抗磨损能力,并且与其他类型的传感器不同,不需要任何繁琐 的外部信号放大设备。
世界各地的许多客户一直在自动化和研究应用中广泛使用 ROBOTOUS 的传感器, 例如:医疗、工程、军事、制药等。ROBOTOUS 六轴力矩传感器的设计可与目 前市场上的大多数机器人手臂或其他类型的协作机器人配合使用,无需事先进行 任何修改。公司的传感器不仅适用于制造业,也适用于医疗或康复设备,甚至适 用于无人机行业。
ROBOTOUS 还设立力矩传感器的数据解决方案。RFTDAQ-001 软件包可以直接 和同时对RFT机器人力矩传感器的数据进行汇编和分析。这个数据集被处理后, 可以得到参考数据,用于机器人力矩传感器的现场数据评估。参考数据用于与获 得的数据进行比较,以寻找数据集中的任何异常情况。这对检验或检查制造过程 特别有用,这在 QC/QA 工作中是不可缺少的。
02
国内核心力传感器公司介绍
多维力矩传感器相比于单轴力矩传感器技术壁垒较高,多维力传感器不仅要解决 对所测力分量敏感的单调性和统一性难题外,也要解决因结构加工和工艺偏差引 起的维间(轴间)扰乱难题、动静态标定难题以及矢量运算中的解耦算法和电路 实现等。业内比较知名的企业包括宇立仪器、坤维科技、昊志机电、柯力传感、 汉威科技、中航电测等。
(1) 宇立仪器
宇立仪器有限公司(Sunrise Instruments,简称 SRI),公司主营多轴力传感器和 机器人智能力控打磨设备(六轴力传感器/iGrinder 智能浮动磨头/六维力传感器/三 轴力传感器/机器人关节扭矩传感器/多维力传感器/机器人打磨/力控打磨/打磨抛 光去毛刺),是一家集生产、研发于一体的技术密集型企业。六轴力传感器能够 测量 FX、FY、FZ、MX、MY 和 MZ。宇立仪器是全球领先的六轴力传感器供应 商。产品应用于机器人及自动化、汽车碰撞测试、汽车耐久测试、生物力学和通 用试验设备等多个领域。自 2007 年以来,SRI 设计生产了 9 大系列,200 多个型 号的多轴力传感器,从一轴至六轴,都有相应的产品。
(2) 坤维科技
常州坤维传感科技有限公司成立于 2018 年,是一家致力于提供高精度力觉传感 器(六轴力传感器)及力控解决方案的企业。公司主营智能力觉传感器的研发、 制造、销售、及技术推广,开发面向机器人及其他智能装备行业的力觉传感器产 品,为机器人及其它智能装备、工业过程监控、产品质量检测、科研测试测量等 领域提供力觉测量解决方案及相关产品。公司具有多年航天科研经验,创始团队全部来自于国内航天科研机构,团队掌握 力觉测量核心技术,具备相关产品的自主知识产权,在多轴力测量领域有大量的 工程实践经验。公司不断在产品的研发上精益求精,凭借优秀的产品技术已获得 多项发明专利。2020 年 11 月,瀚川智能通过全资子公司苏州瀚海皓星投资管理 有限公司入股常州坤维传感科技有限公司。截至目前,瀚川智能对常州坤维传感 科技有限公司的持股比例达 4.56%。
(3) 昊志机电
广州市昊志机电股份有限公司成立于 2006 年,是一家专业从事中高端数控机床、机器人、新能源汽车核心功能部件等的研发设计、生产制造、销售与维修服务的 国家高新技术企业。昊志机电秉承“立足自主技术创新、服务全球先进制造”的发展战略,逐步发展成 为国内外主轴专业领域中研产销规模最大的企业之一,电主轴领域全球市场占有 率第一, 公司立足主轴行业,借助在研发、制造、客户、品牌等方面的积累, 稳步向数控机床和工业机器人等高端装备的核心功能部件领域横向扩张,目前产 品涵盖 PCB钻孔机/成型机/划片机电主轴、数控金属/玻璃雕铣机电主轴、数控车 床主轴/电主轴、走芯车床电主轴、直结与皮带式机械主轴、加工中心电主轴、 钻攻中心电主轴、高速内/外圆磨床主轴等数十个系列上百种产品。
昊志机电拥有一批经验丰富、锐意创新的科技型人才队伍,研发人员 380 余人, 具备优异的创新水平、研发实力和竞争力,近三年平均研发投入占营收比重的 8% 以上,截止 2021 年 12 月 31 日,公司及境内子公司合计拥有专利 514 项,公司收 购的 Infranor 集团拥有主要专利共计 55 项。公司具备完善、齐全的各类高端实验 室,包括:理化实验室、轴承实验室、测量实验室、电机实验室、综合性能实验 室、切削实验室、直线电机实验室、减速机实验室等。
(4) 柯力传感
宁波柯力传感科技股份有限公司(以下简称“柯力传感”)成立于 1995 年,位 于宁波市江北区投资创业园区,是目前全球称重领域物联网研发与推广应用的主 要引领者之一,也是中国重要的称重元件制造及销售企业之一和工业物联网产业 开拓者之一。主要研制和生产各类物理量传感器、称重仪表、电子称重系统、工 业物联网系统成套设备,提供不停车检测系统、建筑机械物联网(含干粉砂浆)、 无人值守一卡通、智能物流设备物联网、环保设备物联网、智能消费设备物联网、 畜牧业物联网、车载物联网、港机及海洋工程装备物联网等工业物联网系统及场 景应用解决方案,同时提供专业的物联网软件定制服务,建有“称重设备数据中 心”、物联网实验中心及 26 个实验室。
柯力传感在电阻应变式传感器积累深厚,具有拓展至机器人力矩传感器新蓝海市 场的潜力。公司为应变式力传感器龙头,根据华经产业研究院数据,预计 22 年 中国应变式传感器产量及需求量分别达到 1122.6/1211.2 万只。柯力传感 2022 年 应变式传感器产量为 336.7 万只,市占率达 30%。应变式传感器精度高、技术成 熟成本低、测量范围广,有望在机器人力矩传感器中使用。柯力传感作为国内电 阻应变式传感器龙头,产品囊括 17 个品类,其中包括两款扭矩传感器。柯力传感在电阻应变式传感器有较深厚积累,有进入机器人力矩传感器新蓝海市场的潜 力。
(5) 汉威科技
汉威科技集团股份有限公司于 1998 年 09 月 11 日成立。公司经营范围包括:研 究、开发、生产销售电子传感器;电子监控技术开发;研究、开发、生产、销售 检测仪器及控制系统、机械电器设备等。汉威科技战略眼光较为前瞻,2016 年以来通过股权收购,累计持有苏州能斯达 56.5%股权。通过股权控制,公司掌握了 4大核心技术、7大产品系列,以及一条 1000 万支柔性传感器的印刷线和组装线。产品下游应用广泛,机器人领域导入 推进中。汉威科技目前下游应用主要围绕消费电子、 IOT 和医疗健康领域。机器 人应用方面,苏州能斯达研发的多模态柔性微纳传感器能很好的实现人与机器的 识别、反馈、交互功能。
(6) 中航电测
中航电测为国内智能军民用智能测控龙头。公司是主导生产电阻应变计、传感器、 电子衡器、汽车安全检测线、人造宝石及其晶体制品和扭矩扳子为一体的多元化 现代企业。公司拥有国际水平的设计能力、接近国际水平的工艺装备及工艺制造 技术,在国内中高端应变计和传感器市场占据主导地位;公司还被认定为“陕西 省高新技术企业”,产品被评为“陕西省名牌产品”。公司生产的产品行销欧洲、 亚洲、南美洲和北美洲,成为中国国内最大的衡器部件生产企业,是世界上电阻 应变计、称重传感器最大的供货商之一。
2018-2021 年,中航电测的营业收入、归母净利分别从 13.88/1.56 亿元增长至 19.43/3.07 亿元,期间 CAGR 分别达到+11.85%/+25.26%。2022 年中航电测受到 乘用车检测行业政策调整影响,并加大研发投入,营收、净利润有下滑。中航电 测具有多款应变片、压力传感器、扭矩传感器。根据中航电测 2022 年年报披露, 中航电测传感控制业务开始进军机器人业务,未来有望受益人形机器人产业链对 于力传感器的需求放量。
-
瑞之辰压力传感器,小尺寸的国产替代新风潮2025-09-01 1946
-
国产电流传感器的国产替代趋势2023-04-12 3070
-
什么是力传感器?如何提高力传感器的精度?2021-07-28 6102
-
多维力传感器被广泛应用2020-08-05 1940
-
数字式称重传感器的功能演变过程2019-07-11 3076
-
国内拉绳式位移传感器的市场前景2018-11-06 2327
-
我国工业智能化发展离不开传感器,国内传感器正在加速替代进口传感器2018-10-24 2418
-
国内智能控制器行业龙头企业招聘资深传感器工程师2018-01-26 4049
-
中国创新智能硬件市场发展专题研究报告2015-11-24 1126
-
中国传动网:我国变频器行业逐渐向高端化冲刺2014-04-18 4607
-
95华梵大学机电工程学系专题研究成果报告2010-07-17 770
-
锂亚硫酰氯电池专题研究2009-11-06 4700
-
镍氢电池隔膜专题研究 (绝密文件)2009-11-05 1962
全部0条评论

快来发表一下你的评论吧 !
