

机器人关节Joint描述
描述
机器人模型中的刚体最终要通过关节joint连接之后,才能产生相对运动。
URDF中的关节有六种运动类型。
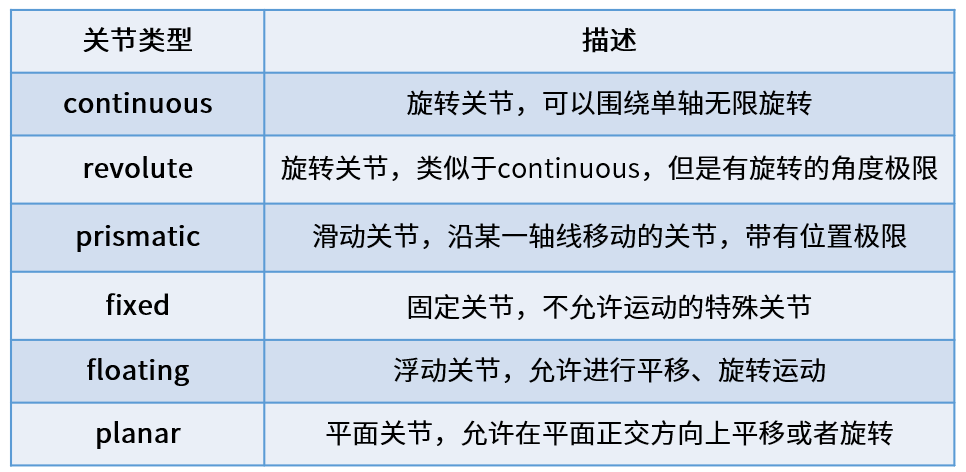
continuous,描述旋转运动,可以围绕某一个轴无限旋转,比如小车的轮子,就属于这种类型。
revolute,也是旋转关节,和continuous类型的区别在于不能无限旋转,而是带有角度限制,比如机械臂的两个连杆,就属于这种运动。
prismatic,是滑动关节,可以沿某一个轴平移,也带有位置的极限,一般直线电机就是这种运动方式。
fixed,固定关节,是唯一一种不允许运动的关节,不过使用还是比较频繁的,比如相机这个连杆,安装在机器人上,相对位置是不会变化的,此时使用的连接方式就是Fixed。
Floating是浮动关节,第六种planar是平面关节,这两种使用相对较少。
在URDF模型中,每一个link都使用这样一段xml内容描述,比如关节的名字叫什么,运动类型是哪一种。

parent标签:描述父连杆;
child标签:描述子连杆,子连杆会相对父连杆发生运动;
origin:表示两个连杆坐标系之间的关系,也就是图中红色的向量,可以理解为这两个连杆该如何安装到一起;
axis表示关节运动轴的单位向量,比如z等于1,就表示这个旋转运动是围绕z轴的正方向进行的;
limit就表示运动的一些限制了,比如最小位置,最大位置,和最大速度等。
Info
ROS中关于平移的默认单位是m,旋转是弧度(不是度),所以这里的3.14就表示可以在-180度到180度之间运动,线速度是m/s,角速度是rad/s。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
为什么说关节扭矩传感器是高端机器人的“触觉神经”?2026-04-17 901
-
人形机器人关节扭矩传感器的详细应用场景及解决方案2026-05-20 184
-
工业机器人的基本结构2015-01-19 9559
-
机器人的关节结构是怎样设计的?2015-03-09 8448
-
关节机器人控制2015-04-29 5481
-
人形机器人的关节技术能不能使用球形关节?2015-09-04 9938
-
机器人的主要技术参数2017-08-15 7547
-
工业机器人的工作原理2017-12-15 4785
-
工业机器人的末端关节旋转该精确控制?2018-11-01 4422
-
微型机器人关节使用超声波电机的优势2020-11-02 2821
-
机器人关节用什么电机?2021-05-27 4277
-
机器人关节用什么电机2021-05-28 2059
-
直角坐标机器人&关节机器人的区别详解2022-11-02 3994
-
直角坐标机器人&关节机器人的区别详解2022-10-27 2954
-
剑指人形机器人赛道,泰科机器人推出重磅关节模组2023-11-22 1991
全部0条评论

快来发表一下你的评论吧 !
