

如何创建机器人模型
描述
完整机器人模型
所有的link和joint标签完成了对机器人每个部分的描述和组合,全都放在一个robot标签中,就形成了完整的机器人模型。
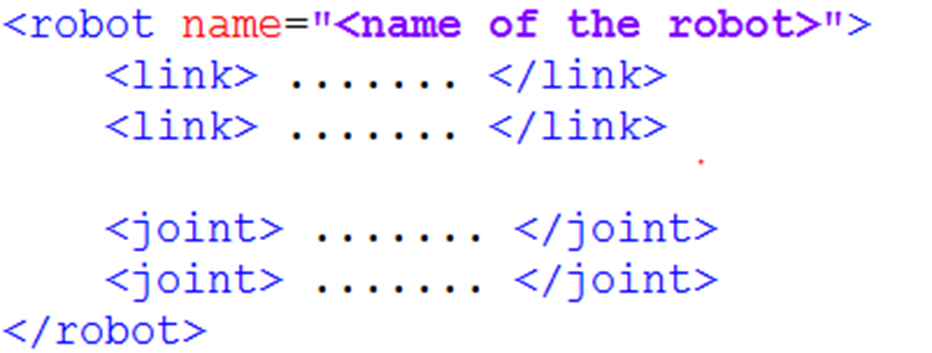
所以大家在看某一个URDF模型时,先不着急看每一块代码的细节,先来找link和joint,看下这个机器人是由哪些部分组成的,了解完全局之后,再看细节。
创建机器人模型
好啦,讲了这么多,还是要看一个完整的示例。
我们以这款移动机器人模型为例,一起看下它的URDF建模过程。
功能包结构
机器人的模型放置在learning_urdf功能包中,功能包中包含的文件夹如下:
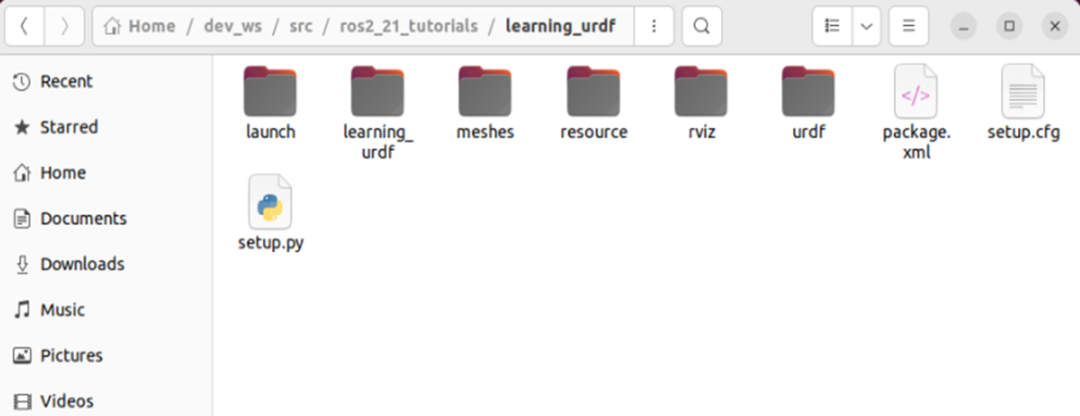
- urdf:存放机器人模型的URDF或xacro文件
- meshes:放置URDF中引用的模型渲染文件
- launch:保存相关启动文件
- rviz:保存rviz的配置文件
模型可视化效果
我们先来看下这个模型的效果,尝试逆向分下一下机器人的结构。
$ ros2 launch learning_urdf display.launch.py
很快就可以看到Rviz中显示的机器人模型啦,大家可以使用鼠标拖拽观察。
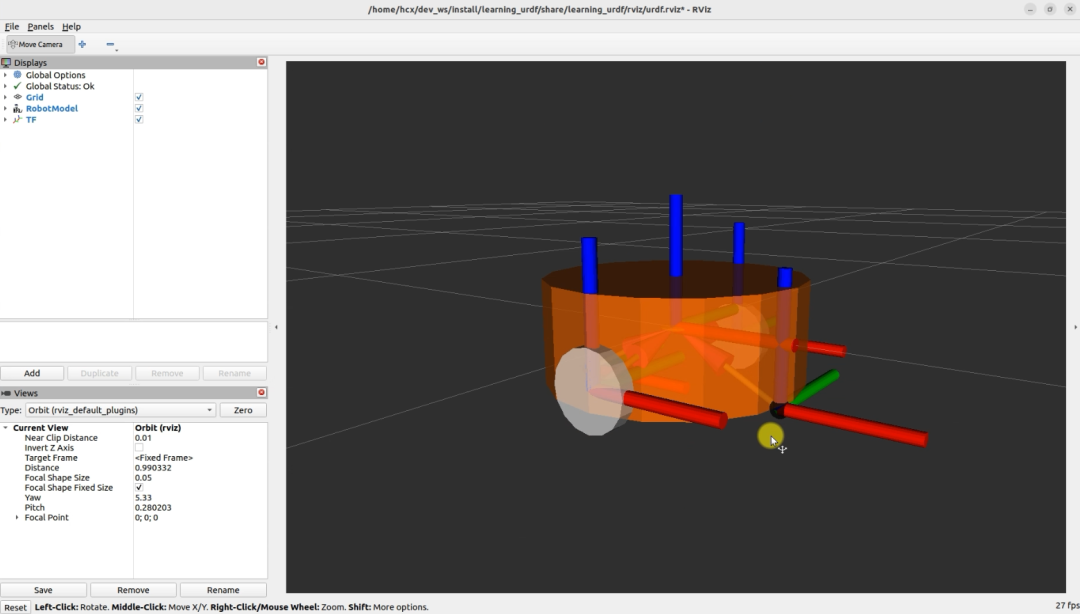
从可视化的效果来看,这个机器人由五个link和4个joint组成。
查看URDF模型结构
我们分析的对不对呢,可以在模型文件的路径下,使用urdf_to_graphviz这个小工具来分析下。
$ urdf_to_graphviz mbot_base.urdf # 在模型文件夹下运行
运行成功后会产生一个pdf文件,打开之后就可以看到URDF模型分析的结果啦,是不是和我们的猜测完全相同呢!
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
Al大模型机器人2024-07-05 2491
-
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型2024-12-29 1992
-
机器人姿态监控2012-02-11 5914
-
机器人餐厅2014-07-26 2642
-
机器人视觉——机器人的“眼睛”2015-01-23 6158
-
nao机器人与其他机器人的区别2015-02-13 7014
-
【Aworks申请】家庭服务机器人2015-07-19 2121
-
工业机器人的工作原理2017-12-15 4847
-
请问为什么用matlab仿真机器人末端轨迹,会出现“位置 1 的索引超出数组范围(不能超过 1)”的问题?2020-01-09 17792
-
机器人的定义是什么?工业机器人的应用有哪些?2021-07-05 5492
-
工业机器人仿真与编程2021-09-07 2444
-
什么是服务机器人2021-09-17 2300
-
将Simulink模型与Lego机器人结合使用2021-12-20 1935
-
如何才能快速的创建机器人模型2019-06-25 5504
-
自主导航机器人的创建2023-06-27 603
全部0条评论

快来发表一下你的评论吧 !
