

ROS如何配置固定串口设备
描述
配置固定串口设备
在linux中设备接到哪个串口号上是随机的,为解决这个问题,可以先将N100 设备的串口号设置成固定的名称,避免后期需要重复的修改配置
修改串口号
从网上下载 CP21xxCustomizationUtility 软件。
下面通过 CP21xxCustomizationUtility 这个 windows 上的软件修改并固定
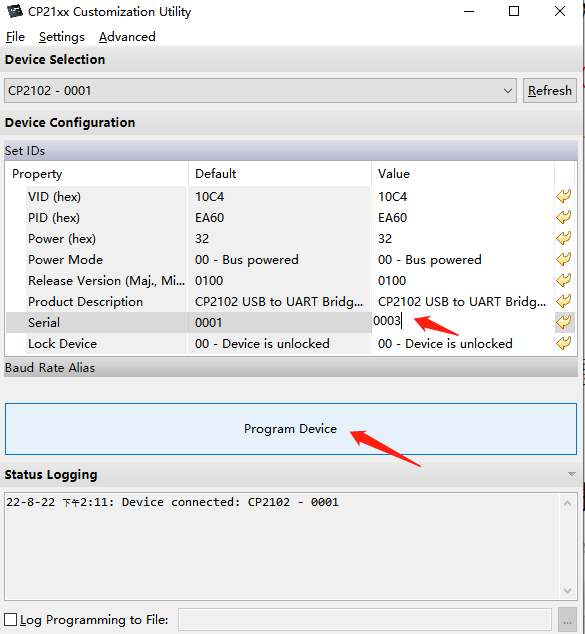
修改0003那个地方,然后点击 Program Device
设备创建别名
外设对应的串口名一般都是会变化的,为了避免手动选择,这里可以通过给 USB 设备创建别名的方式解决。
命名一个wheeltec_udev.sh 脚本文件
echo 'KERNEL=="ttyUSB*", ATTRS{idVendor}=="10c4", ATTRS{idProduct}=="ea60",ATTRS{serial}=="0003", MODE:="0777", GROUP:="dialout", SYMLINK+="fdilink_ahrs"' >/etc/udev/rules.d/fdilink_ahrs.rules
service udev reload
sleep 2
service udev restart
其中 ATTRS{serial}==”0003” 就是刚从0001改为的0003,其它信息没有变,看上面的截图
sudo chmod 777 wheeltec_udev.sh
给这个脚本文件赋权
sudo sh wheeltec_udev.sh
执行脚本
测试
把 WHEELTEC N100 模块连接到 ROS 主控
在终端运行:ll /dev 查看设备

结果现实已经成功用 fdilink_ahrs 这个别名来代表惯导模块了,后续不管接 到哪个 USB 口,使用的时候均不需要考虑端口号变化问题。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
如何使用menuconfig添加配置micro-ros软件包?2025-09-25 244
-
基于串口的STM32通过rosserial和ROS系统通信的代码2021-08-06 1553
-
STM32和ROS机器人的串口通信方案2021-08-11 1409
-
最实用的STM32和ROS机器人的串口通信方案2021-08-20 1592
-
如何使用串口联系ROS和下位机2021-11-23 668
-
请问ros的串口函数库如何和stm32进行串口通讯?2021-11-26 1531
-
求大佬分享ROS与STM32的串口通信的程序2021-12-06 1010
-
如何完成ROS与STM32之间的串口通信呢2021-12-10 2394
-
请问一下stm32与ros进行串口通信的方法是什么?2021-12-16 923
-
ROS简介2021-12-17 1346
-
配置STM32-ROS通信常见的问题有哪些?2021-12-23 2133
-
如何在ROS上使用serial包进行串口通信2022-02-21 1540
-
基于无线wifi网络的X3派和PC虚拟机通过ROS2实现跨设备通信2022-07-13 5429
-
ROS路由器安装和配置录像2010-09-09 1405
-
如何配置ROS驱动功能包2023-11-22 3531
全部0条评论

快来发表一下你的评论吧 !
