

如何配置ROS驱动功能包
描述
配置ROS驱动功能包
将WHEELTEC 100N的 ROS_SDK 保存在工作空间的src文件夹下。
通过
catkin_make
进行编译。
刚装的ros环境会报错,如下:
Make Error at /opt/ros/noetic/share/catkin/cmake/catkinConfig.cmake:83 (find_package):
Could not find a package configuration file provided by "serial" with any
of the following names:
serialConfig.cmake
serial-config.cmake

原因就是在CMakeList.txt文件中包含了 serial的功能包,需要进行安装
sudo apt install ros-noetic-serial
安装成功后会提示如下:

然后在进行 编译
catkin_make
就成功了
看下其launch文件中的相关参数设置
< launch >
< node pkg="fdilink_ahrs" name="ahrs_driver" type="ahrs_driver" output="screen" >
< !-- 是否输出debug信息 -- >
< param name="debug" value="false"/ >
< !-- 串口设备,可通过rules.d配置固定。
若使用DETA100,则value="/dev/wheeltec_ch340"
若使用WHEELTEC N系列,则不需要改动 -- >
< param name="port" value="/dev/fdilink_ahrs"/ >
< !-- 波特率 -- >
< param name="baud" value="921600"/ >
< !-- 发布的imu话题名 -- >
< param name="imu_topic" value="imu"/ >
< !-- 发布的imu话题中的frame_id -- >
< param name="imu_frame" value="gyro_link"/ >
< !-- 地磁北的yaw角 -- >
< param name="mag_pose_2d_topic" value="/mag_pose_2d"/ >
< !-- 欧拉角 -- >
< param name="Euler_angles_pub_" value="/euler_angles"/ >
< !-- 磁力计磁场强度 -- >
< param name="Magnetic_pub_" value="/magnetic"/ >
< !-- 发布的数据基于不同设备有不同的坐标系 -- >
< param name="device_type" value="1"/ > < !-- 0: origin_data, 1: for single imu or ucar in ROS, 2:for Xiao in ROS -- >
< /node >
< /launch >
其中 port 要设置成通过脚本更改后的名称 /dev/fdilink_ahrs
串口的波特率 默认是 921600
编译成功后即可 输入指令运行打开惯导
roslaunch fdlink_ahrs ahrs_data.launch
调用的ahrs_driver节点会发布sensor_msgs/Imu格式的imu topic。
std_msgs/Header header
uint32 seq
time stamp
string frame_id
geometry_msgs/Quaternion orientation
float64 x
float64 y
float64 z
float64 w
float64[9] orientation_covariance
geometry_msgs/Vector3 angular_velocity
float64 x
float64 y
float64 z
float64[9] angular_velocity_covariance
geometry_msgs/Vector3 linear_acceleration
float64 x
float64 y
float64 z
float64[9] linear_acceleration_covariance
也会发布geometry_msgs/Pose2D格式的二维指北角话题,话题名默认为/mag_pose_2d。
float64 x
float64 y
float64 theta # 指北角
通过
rostopic list
查看当前消息列表

rostopic echo /imu
终端打印 imu消息
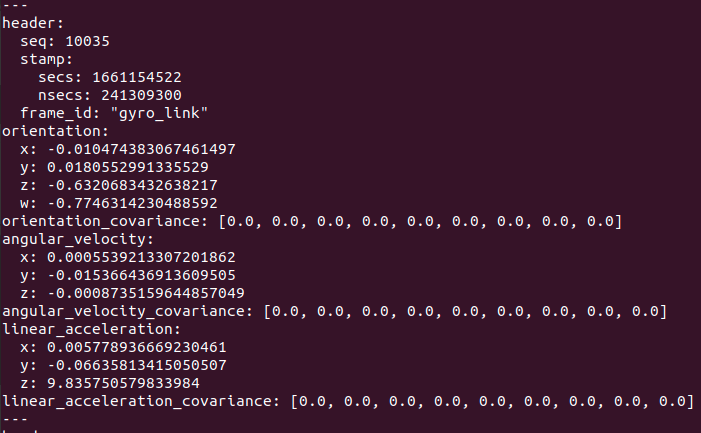
ROS使用成功
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
如何使用menuconfig添加配置micro-ros软件包?2025-09-25 244
-
为ROS navigation功能包添加自定义的全局路径规划器(Global Path Planner)2021-05-16 4922
-
Autolabor ROS驱动模块的节点有何功能2021-09-23 1533
-
如何利用ROS去创建一种工作空间与功能包呢2022-02-14 1003
-
如何在ROS上使用serial包进行串口通信2022-02-21 1540
-
ROS教程之ROS机器人操作系统基础知识概述资料免费下载2018-10-15 1511
-
NVIDIA Isaac ROS GEM的功能特性2022-08-14 2570
-
ROS Navigation Stack的整体设计思路和功能包2023-02-01 2622
-
ros驱动-架构及电机驱动和编码器功能的实现2023-03-17 625
-
ROS部署PaddlePaddle的CV模型2023-10-20 1718
-
ROS系统读取USB相机图像数据2023-10-29 1763
-
如何创建新的ROS工作空间2023-11-26 2438
-
ROS2中自带例程测试2023-11-28 2382
-
在TogetherROS中如何安装ROS2功能包2023-12-01 2965
-
初识ros2 功能包建立与可执行文件的配置2026-01-22 645
全部0条评论

快来发表一下你的评论吧 !
