

TogetherROS Bot相机驱动方法
描述
TogetherROS™·Bot相机驱动
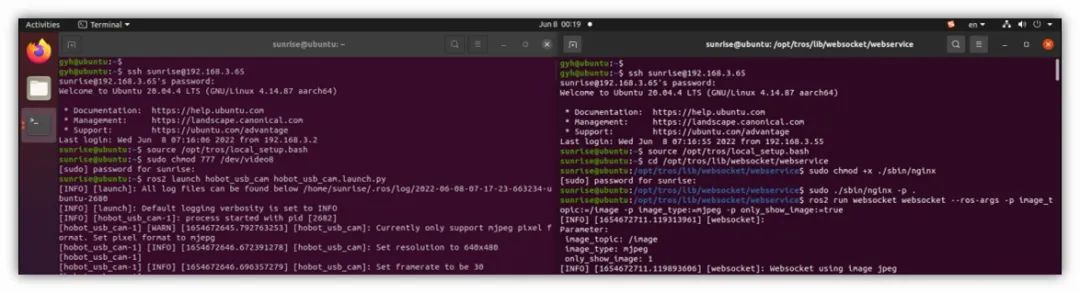
除此之外,TogetherROS™·Bot中也提供了USB摄像头的驱动节点,连接摄像头之后,直接设置设备的权限和TogetherROS的环境变量就可以使用了。
$ source /opt/tros/local_setup.bash
$ sudo chmod 777 /dev/video8
$ ros2 launch hobot_usb_cam hobot_usb_cam.launch.py
之后可以再打开一个新的终端,输入对应的指令,然后启动websocket这个节点,就可以把image这个话题的数据发送到网页了。
$ source /opt/tros/local_setup.bash
$ cd /opt/tros/lib/websocket/webservice
$ sudo chmod +x ./sbin/nginx
$ sudo ./sbin/nginx -p .
$ ros2 run websocket websocket --ros-args -p image_topic:=/image -p image_type:=mjpeg -p only_show_image:=true
这时我们直接打开在通一个局域网下的浏览器,输入X3Pi的地址,就可以进去到一个网页,点击左上方web端展示即可看到USB摄像头的实时画面。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
自制一个支持AI 控制的无刷平衡车机器人:开源项目D-BOT全攻略2025-04-28 4253
-
TogetherROS系统的通信功能测试2023-11-28 1377
-
Android Studio引入AI编程助手Studio Bot2023-05-12 3547
-
带蓝牙的PCB微型战斗机BOT2022-07-22 1172
-
microMsg-bot微信表情机器人2022-05-27 645
-
企业运行BOT模式,物联网已变得越来越重要2020-03-26 3365
-
“导游Bot”在模拟的纽约市中导航定位,使用自然语言跟“游客Bot”交流2018-07-13 3022
-
bot护理机器人2018-04-30 7824
-
索尼 DSC系列数码相机USB驱动下载2010-03-10 665
-
奥林巴斯 数码相机USB驱动下载2010-03-01 668
-
节省和存放数码相机电池的方法与技巧2010-02-03 1539
-
BOT项目公司的十大特质2010-01-08 657
-
索尼 全系列数码相机USB驱动下载2010-01-06 838
-
奥林巴斯数码相机USB驱动程序下载2009-11-23 901
全部0条评论

快来发表一下你的评论吧 !
