

如何编写RRT算法 初始化参数设置
描述
使用matlab2019来编写RRT算法,下面将贴出部分代码进行解释。
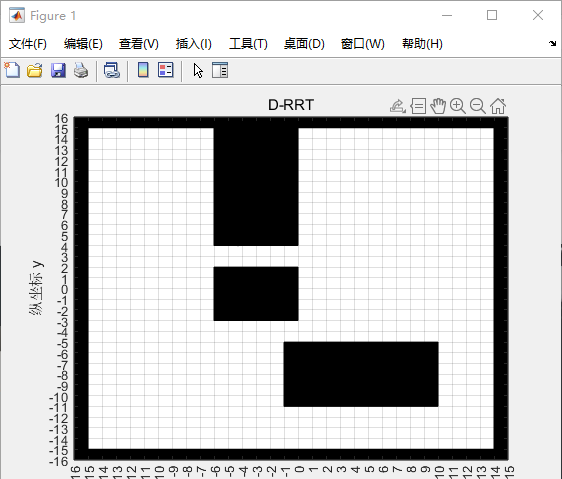
1、生成障碍物
在matlab中模拟栅格地图环境,自定义障碍物位置。
%% 生成障碍物
ob1 = [0,-10,10,5]; % 三个矩形障碍物
ob2 = [-5,5,5,10];
ob3 = [-5,-2,5,4];
ob_limit_1 = [-15,-15,0,31]; % 边界障碍物
ob_limit_2 = [-15,-15,30,0];
ob_limit_3 = [15,-15,0,31];
ob_limit_4 = [-15,16,30,0];
ob = [ob1;ob2;ob3;ob_limit_1;ob_limit_2;ob_limit_3;ob_limit_4]; % 放到一个数组中统一管理
x_left_limit = -16; % 地图的边界
x_right_limit = 15;
y_left_limit = -16;
y_right_limit = 16;
我在这随便选择生成三个矩形的障碍物,并统一放在ob数组中管理,同时定义地图的边界。
2、初始化参数设置
初始化障碍物膨胀范围、地图分辨率,机器人半径、起始点、目标点、生长距离和目标点搜索阈值。
%% 初始化参数设置
extend_area = 0.2; % 膨胀范围
resolution = 1; % 分辨率
robot_radius = 0.2; % 机器人半径
goal = [-10, -10]; % 目标点
x_start = [13, 10]; % 起点
grow_distance = 1; % 生长距离
goal_radius = 1.5; % 在目标点为圆心,1.5m内就停止搜索
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
CW32L083 RTC初始化设置2023-06-24 3568
-
如何排除代码编写器Studio 2和2.10的初始化问题2018-04-25 1403
-
DS278X 系列如何对其进行初始化的参数设置呢?2015-09-03 4622
-
初始化版图的基本参数设置,导入网表2020-12-31 16751
-
如何在simulink初始化电机参数2021-07-07 2562
-
如何去编写一种PWM初始化函数?2021-07-21 1841
-
RDA1846S初始化设置2016-01-15 2386
-
PMAC_参数设置2016-04-26 1340
-
FANUC电机参数初始化方法2017-10-09 12986
-
如何使用Protel99SE实现电子电路仿真时的参数设置方法概述2018-12-10 3175
-
霍尔无刷电机如何进行程序初始化?2019-10-15 9054
-
如何在Segger J-Flash中设置芯片初始化序列?2022-12-12 4361
-
secondary cpu初始化状态设置2023-12-05 2469
-
MCU单片机GPIO初始化该按什么顺序配置?为什么初始化时有电平跳变?2024-02-22 5124
-
EtherCAT总线初始化步骤2025-12-22 1460
全部0条评论

快来发表一下你的评论吧 !
