

软体技术在机器人化制造中的应用与展望
描述
当前,我国对大型结构件(如百米级风电叶片等)的需求日益增长,然而传统专机难以在超大空间内对大型结构件进行高效、连续加工来满足实际需求。而机器人化制造凭借其分布式、集群式、在线式加工策略成为解决上述问题的优选方案。与此同时,其结构复杂、适形性低、容易对工件造成破坏、加工-检测一体化难等问题也成为制造工序中的巨大挑战。软体技术作为一项新兴的技术,已经呈现出极强的应用潜力,通过引入柔性材料、柔性结构和柔性驱动模式,赋予机器人化制造系统全新的优势,使之更加轻量化、柔顺化、无损化、一体化。
近日,华中科技大学机械学院丁汉院士、吴志刚教授团队在《机器人》上发表了题为“软体技术在机器人化制造中的应用与展望”的综述。本文首次系统地讨论了软体技术在机器人化制造中的应用前景与优势。文中将机器人化制造划分为机器人化加工、机器人化检测和机器人化装配三个流程,并分别讨论了变刚度机制、柔性传感器及软体赋能夹持器在其中的应用前景。文章最后分析了软体技术还未能大规模在机器人化加工中应用的几点原因,并对其发展做出了展望。
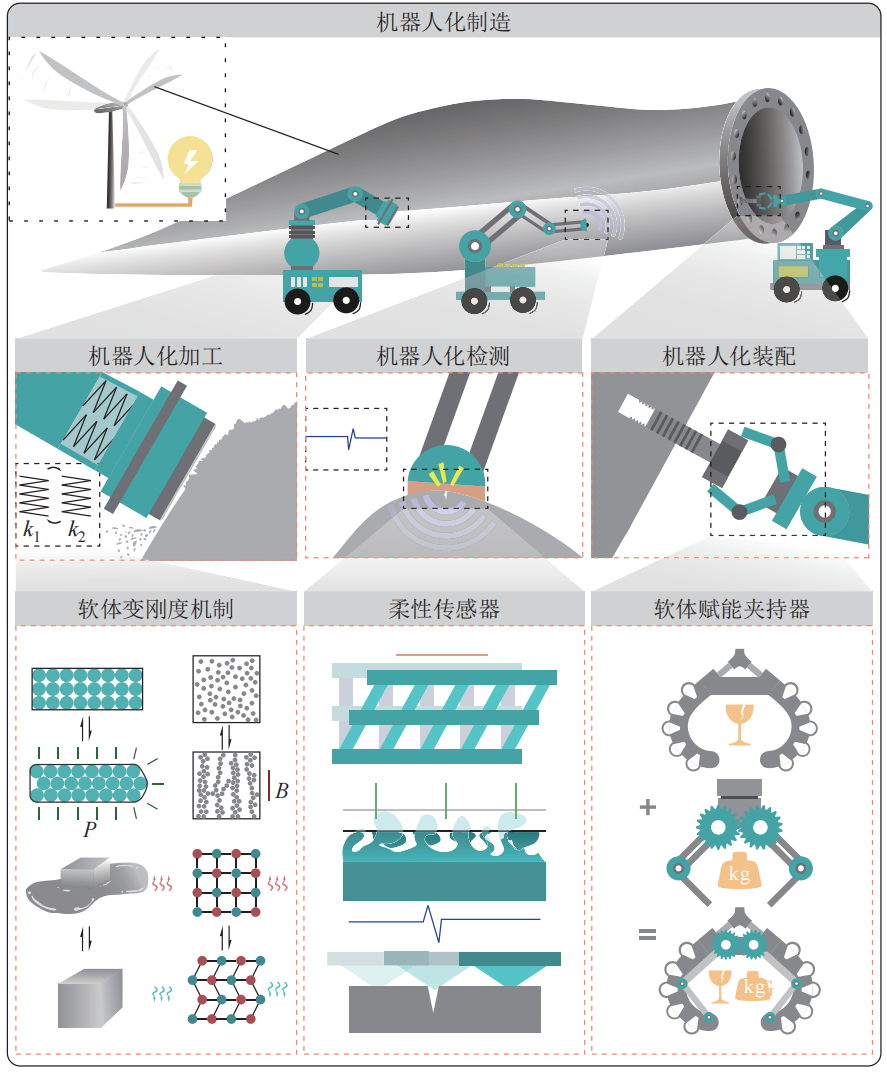
图1 机器人化制造与软体技术
软体技术在机器人化加工中的应用:
机器人化加工方案中,最重要的是实现适形恒力加工,阻抗控制法是最传统的方法,但是这种方法复杂度高,且会给机器人关节引入额外的高负载。经典的软体变刚度机制有如下四种:阻塞变刚度机制、磁流变液体变刚度机制、低熔点合金变刚度机制与形状记忆材料变刚度机制。引入这些机制可以降低变刚度关节的复杂度、提高变刚度速度、实现无感化加工、赋予机器人化加工工具本体变刚度特性。
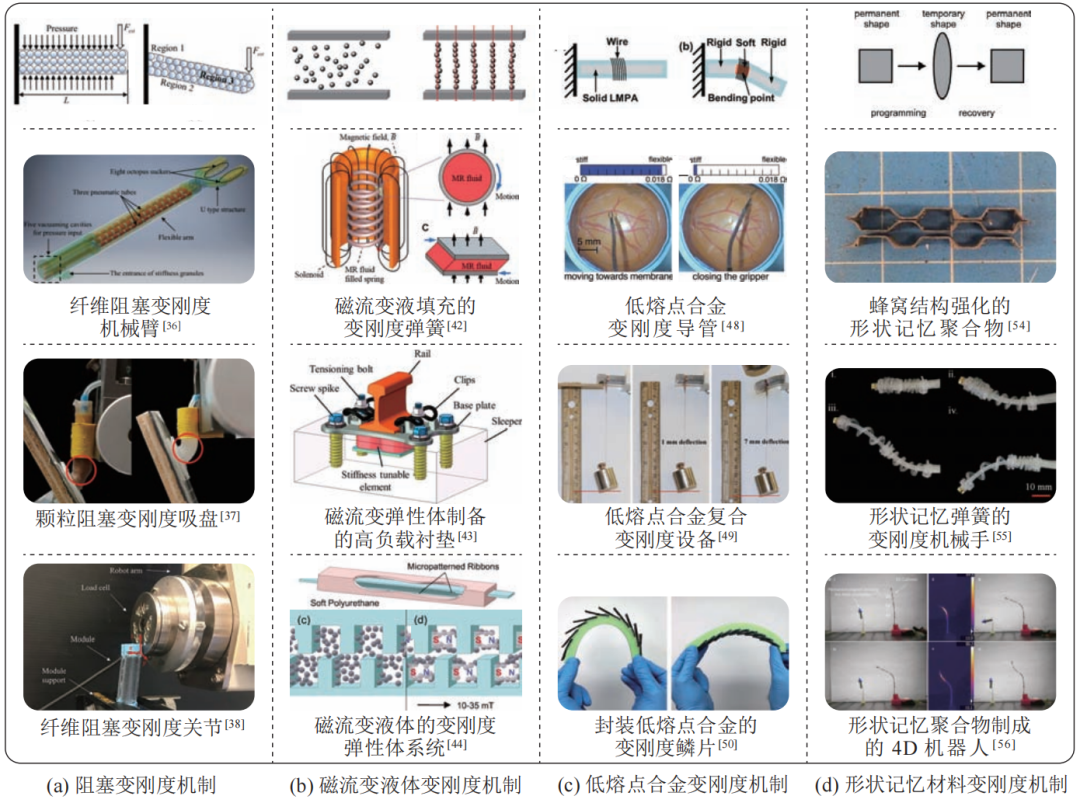
图2 软体变刚度机制
软体技术在机器人化检测中的应用:
自身感知和交互感知是机器人化检测中关键的信息来源,保证了系统的闭环和稳定性。柔性传感器由于其具备多种优良的性质,如体积小、重量轻、柔顺性好、可拉伸性好、无感度强、功耗低、检测设备简单等,已被广泛应用在可穿戴设备、软体机器人感知装置、智能蒙皮中。将柔性传感器与机器人化检测有机地融合在一起,会赋予机器人系统无感式检测、顺应性检测、原位在线检测、低功耗检测等优势。
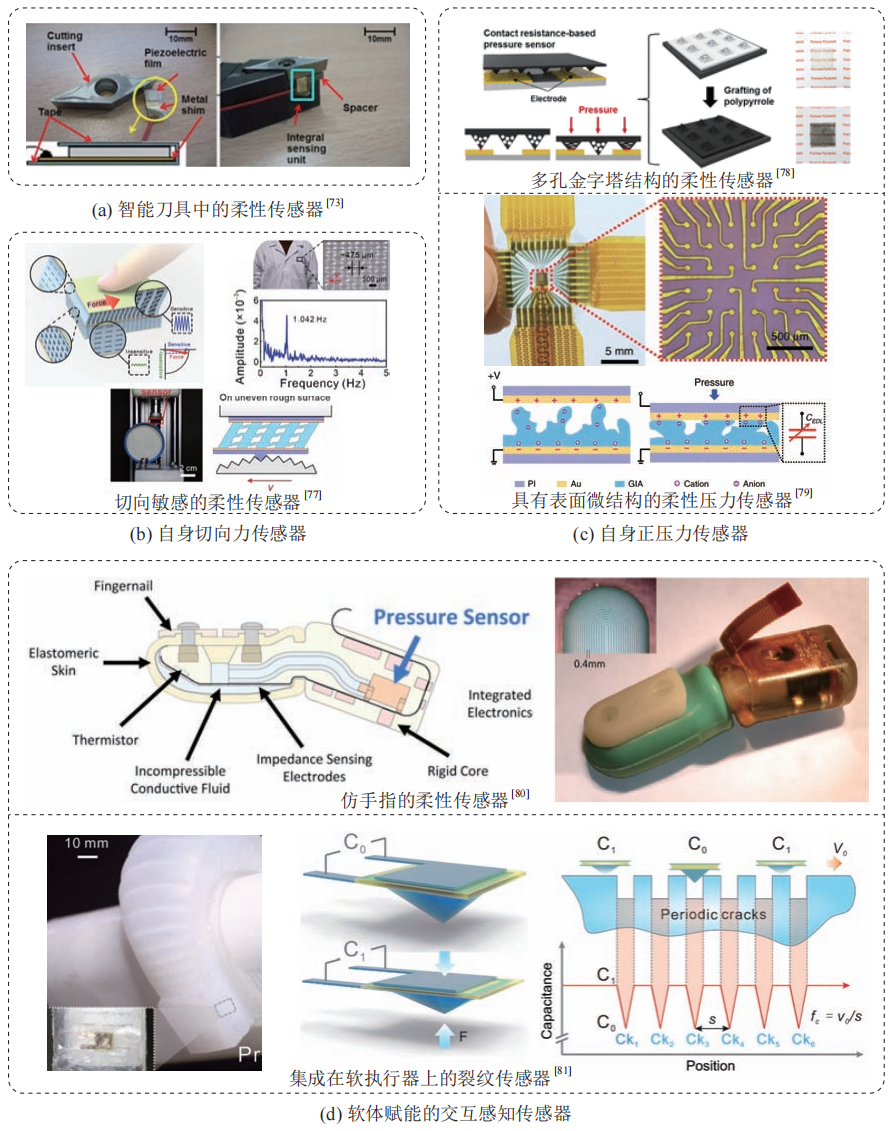
图3 柔性传感器
软体技术在机器人化装配中的应用:
在机器人化装配场景中,刚性夹持器还存在许多问题,比如适应性差、容易对工件产生破坏、灵活性低、对算法和传感器设备要求高等问题。
软体夹持器的适应性强、安全性高、灵活性高并且对算法和传感器设备要求较低,可以适应装配非结构化与复杂化的工件装配任务,但是其输出力较低。
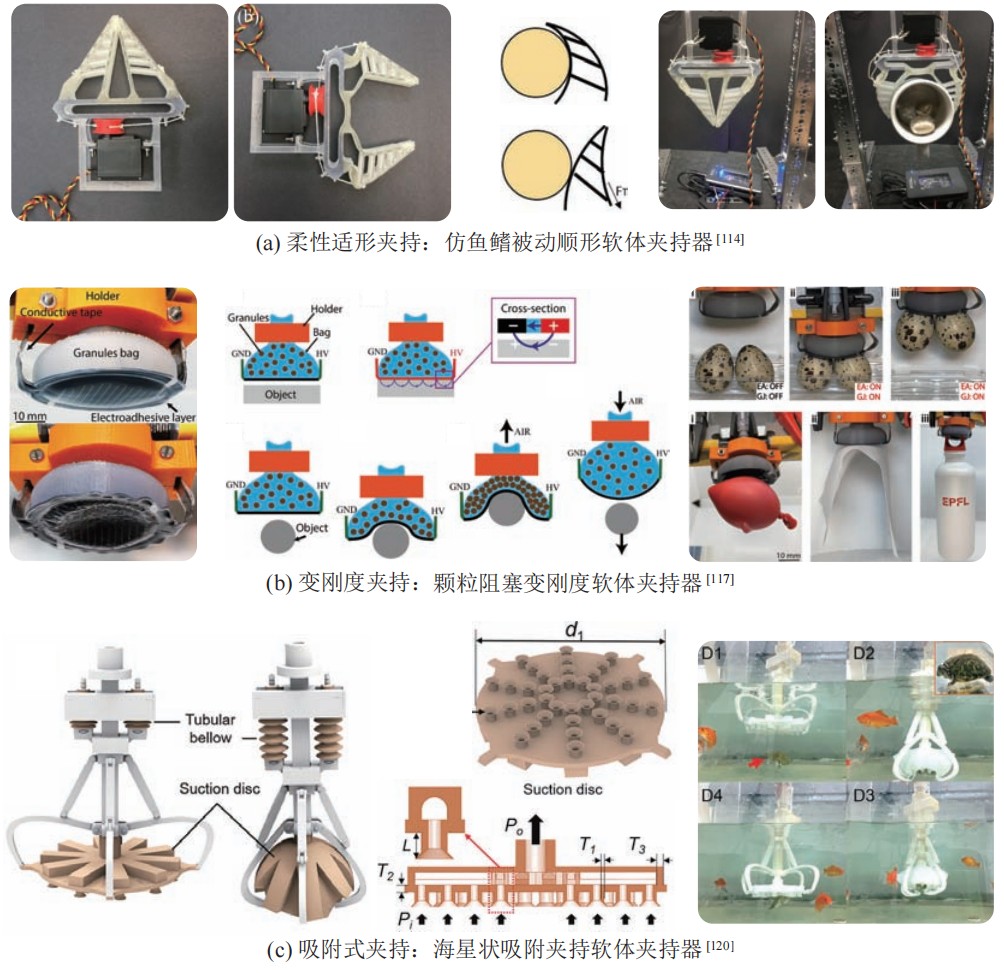
图4 软体夹持器
将软体技术赋能于刚性系统中,可以使二者的优势在最大程度得到体现。赋能后的机器人化装配系统将具备以下优势:丰富的操作策略、极宽的夹持范围、多样化的具身感知方式、更快的驱动速度。
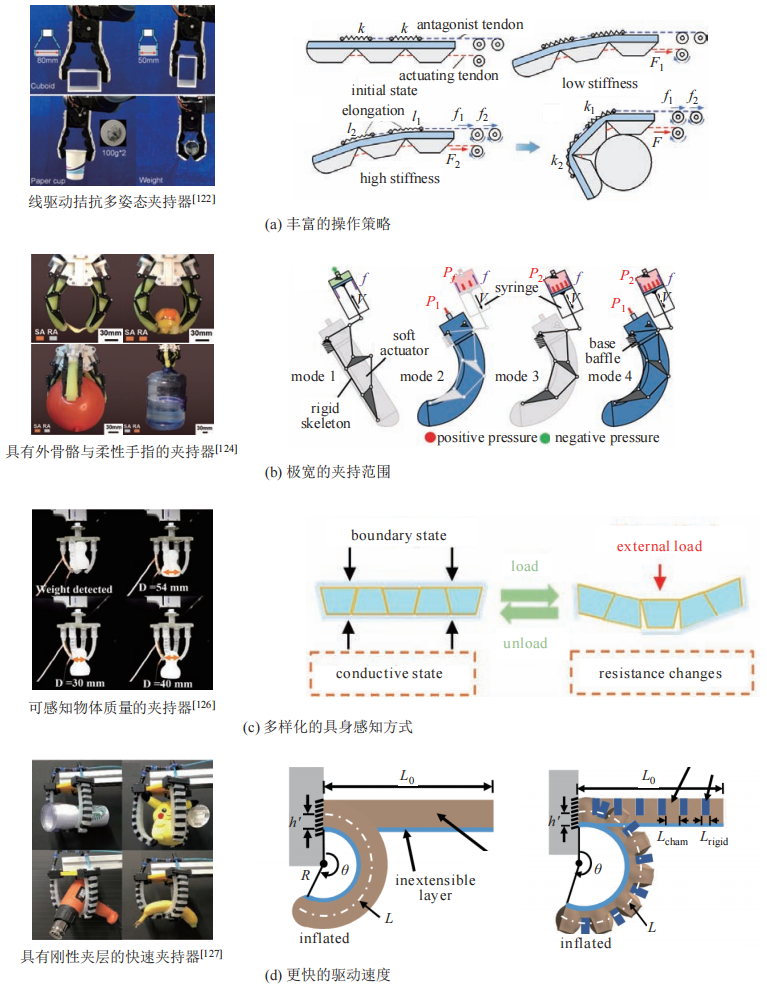
图5 软体赋能的刚柔夹持器
综合上述内容,软体技术在机器人化制造中的应用已初具雏形,并且结合当前以及未来的制造环境和需求,软体技术在机器人化制造中还有巨大的应用潜力,软体技术也促进了机器人制造系统向着 “人-机-环境”交互的共融机器人系统发展。
华中科技大学机械学院研究生蒲萌浩为第一作者,华中科技大学吴志刚教授为论文通信作者,本文得到了国家自然科学基金项目(批准号:52188102)的支持。
-
高压放大器在软体机器人研究中的应用2025-07-08 976
-
高压放大器在水下扑翼软体机器人研究中的应用2024-12-04 1122
-
Aigtek:介电弹性体高压放大器在软体机器人研究中的应用2024-04-25 1503
-
高压放大器在介电弹性体折纸术软体机器人中的应用2024-02-27 5532
-
高压放大器在软体机器人领域的应用2023-10-13 1303
-
中国科大展示软体机器人手臂在日常生活中的巨大应用潜力2021-04-13 4131
-
功率放大器基于振动驱动的旋转及攀爬软体机器人的研究2021-04-09 3337
-
ASM将利用3D打印技术制造出真正的软体机器人2020-08-14 1736
-
软体机器人学习问题探讨2019-08-12 4816
-
六轴工业机器人的主要特点2017-08-08 6714
-
智能制造推动机器人产业与视觉紧密结合2016-02-03 5932
-
【深度剖析】德国机器人发展未来展望2016-01-12 5363
-
工业机器人未来展望2015-02-11 7170
-
模仿蚯蚓开发软体机器人2015-01-19 13328
全部0条评论

快来发表一下你的评论吧 !
