

Matlab中如何绘制最优路径
描述
绘制最优路径
从目标点开始,依次根据节点及父节点回推规划的路径直至起点,要注意tree结构体中parent的长度比child要小1。最后将规划的路径显示在figure中。
%% 绘制最优路径
temp = tree.parent(end,:);
trajectory = [tree.child(end,1)-0.5*resolution, tree.child(end,2)-0.5*resolution];
for i=size(tree.child,1):-1:2
if(size(tree.child(i,:),2) ~= 0 & tree.child(i,:) == temp)
temp = tree.parent(i-1,:);
trajectory(end+1,:) = tree.child(i,:);
if(temp == x_start)
trajectory(end+1,:) = [temp(1,1) - 0.5*resolution, temp(1,2) - 0.5*resolution];
end
end
end
plot(trajectory(:,1), trajectory(:,2), '-r','LineWidth',2);
pause(2);
程序运行最终效果如下:
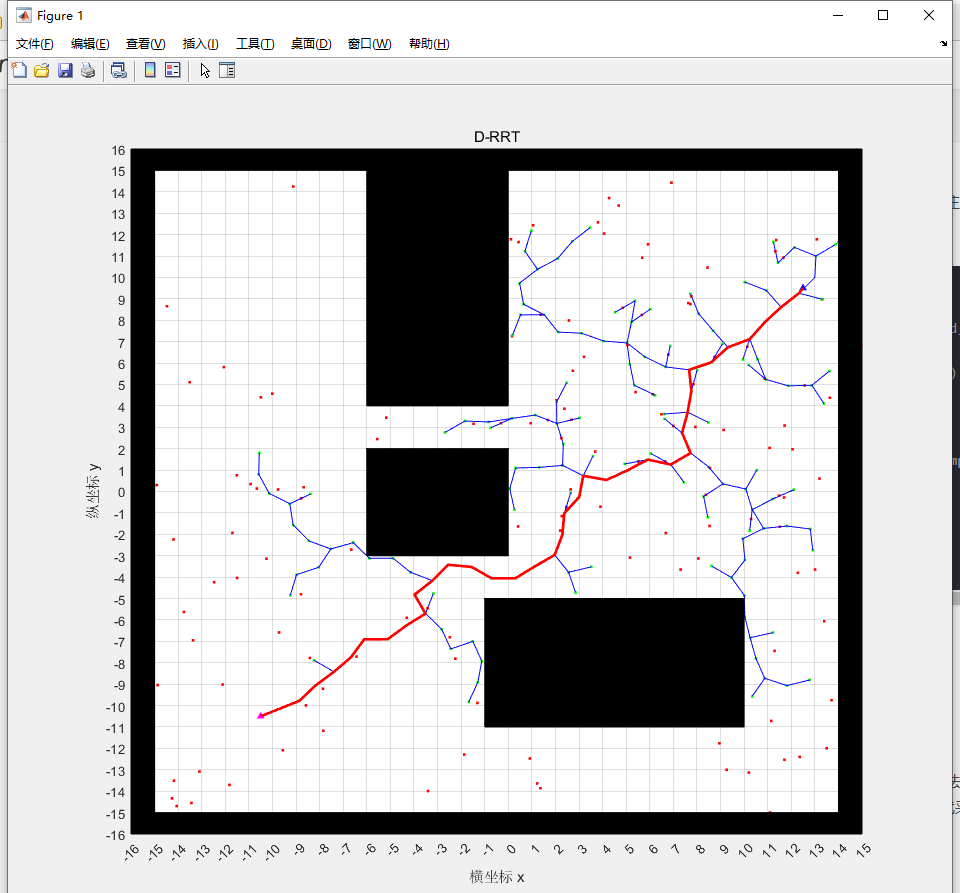
红点都是生成点随机点,绿点是tree中节点,红色路径即为RRT算法规划的路径。
路径平滑(B样条曲线)
由于规划的路径都是线段连接,在节点处路径不平滑,这也是RRT算法的弊端之一。一般来说轨迹平滑的方法有很多种,类似于贝塞尔曲线,B样条曲线等。
我在这采用B样条曲线对规划的路径进行平滑处理,具体的方法和原理我后续有时间再进行说明,这里先给出结果:
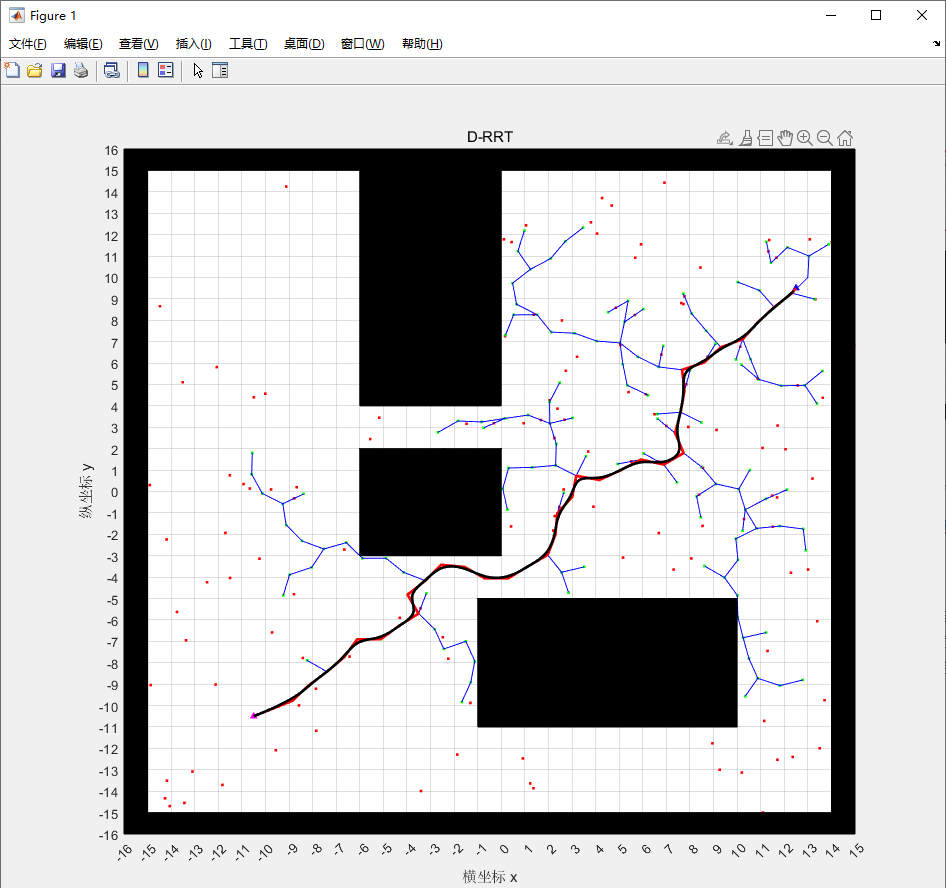
黑色曲线即位平滑处理后的路径。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
30个MATLAB图形绘制2023-07-07 2892
-
请问如何用Matlab把excel表格中的数据导入Matlab中并绘制出图?2020-05-20 2794
-
Matlab图形绘制经典案例详细说明2019-08-01 2019
-
基于改进Dijkstra的端端密钥协商最优路径选择算法2017-12-27 1856
-
求教蚂蚁算法求最优路径的matlab方法2017-05-16 4145
-
C_与Matlab混合编程在BEAM绘制中的应用_范婵娇2017-03-19 1093
-
最优化方法及其Matlab程序设计2016-12-17 993
-
Matlab最优化方法2011-11-30 638
-
MATLAB图形绘制基本技术教程2009-09-04 45283
-
MATLAB图形绘制基本技术2009-09-03 1191
-
绘制根轨迹的MATLAB函数介绍2009-07-27 7692
-
matlab最优化实验2008-10-17 2579
全部0条评论

快来发表一下你的评论吧 !
