

如何通过HIL测试系统做ADAS验证
电子说
描述
本文分享的是一个案例,借助NI开放式、数据驱动型、软件互连的生态系统以及PXI功能,采埃孚能够开发可扩展的ADAS HIL系统,在满足未来需求的同时与测试项目的步伐保持一致。 目前,采埃孚的ADAS HIL测试系统原型已复制至HIL集群的多个系统中,在多个软件测试周期中构建了全自动化验证系统。
ZF Mobility Solutions(ZMS)是采埃孚集团旗下的全资子公司,总部位于德国的因戈尔施塔特。ZMS测试系统开发部的愿景是开发出富有创新性的高质量测试系统,以满足复杂的ADAS和AD验证与确认的特定需求。该任务是为采埃孚公司构建基于HIL的测试系统原型,其中包括可用于串行开发项目的硬件、软件和流程。
ADAS验证挑战
ADAS需要在开发的各个阶段进行大量验证。必须在真实场景中针对高度网络化的复杂功能进行测试。但是ADAS的安全性应达到何种程度才能上路供消费者使用?实车测试需要大量时间,不但成本高昂,而且有时提供的信息价值很有限,尤其是在测试的可重复性方面。虽然仍有必要进行实车测试,但也迫切需要将其他测试方法纳入验证过程,从“行驶里程”转变为“待路测的里程质量”。
这个精心制定的验证策略率先成为符合ISO-26262标准或Automotive SPICE (ASPICE)等最先进规范和法规的重要支柱。
在开发中使用虚拟现实(VR)技术是主流趋势之一;这有利于在实际条件下测试早期阶段的系统。基于HIL的开环数据回放和闭环仿真测试系统特别适用于在目标硬件上验证ADAS功能以及确定功能性和非功能性关键性能指标(KPI)。
不同测试方法的要求和组合对于保证驾驶员和乘客的安全并最终实现车辆的自动驾驶至关重要。NI解决方案可构建有助于制定全面测试策略的测试系统,该策略包括真实世界的测试和基于VR的测试。
雷达HIL测试系统要求
ADAS对测试系统的开发有很高的要求,开发这些系统时,重点和需求不再仅仅是高计算能力,而是比以往任何时候都更注重可扩展性、灵活性和高度网络化系统运行的方方面面。待测系统(SUT)是一款采埃孚汽车级雷达传感器,适用于自适应巡航控制、防碰撞、碰撞前安全系统或副驾驶功能等典型ADAS应用。随着SUT的复杂性日益增加,开发新测试系统时必须要从平台角度出发。
此类测试系统的关键方面包括:
模块化:核心HIL和附加软件系统组件的即插即用性
可扩展性:从单个ADAS ECU验证到高性能360°AD传感器数据回放和闭环虚拟现实仿真
可靠性:具备最高可用性要求的全天候串行HIL集群运行
兼容性:将新的HIL测试系统集成到与企业IT基础设施、现有工具和流程相关的现有生态系统中
流畅的可操作性:HIL集群设置,用于远程访问、操作和维护以及诊断各种串行验证
一些ADAS ECU会通过试验场和测试车队获取真实数据记录,而此类ADAS ECU的开环验证必须在复杂的通信接口上以高数据速率启用数据再注入,同时要求实现高精度定时和同步。除记录雷达数据外,还必须对车辆剩余总线通信信号进行并行再处理,如车速信号、偏航率或其他状态数据。对于雷达数据再注入,HIL测试系统必须提供适当的接口,并通过高I/O数据速率和边带通信对再注入进行稳健精确的控制。HIL测试系统软件平台和接口的另一关键方面是在全天候运行HIL测试场的情况下,对HIL测试运行、远程软件部署和HIL操作的全自动化要求。
方法
ZMS与NI合作的主要原因在于高性能的实时计算系统以及高精度的定时和同步功能。PXI平台极具吸引力,具有种类繁多的接口卡和模块,例如最新的汽车总线系统以及模拟和数字I/O卡。
NI的开放式软件平台还支持在HIL系统开发中生成模块化和特定应用的软件,尤其是在使用LabVIEW进行实时软件开发以及SystemLink软件所涵盖的系统操作方面。
PXI平台支持模块化,可在不重设车轮的情况下,将工作从一个ADAS项目切换至另一个项目。这可以通过为每个测试用例设置新参数并依赖核心系统的现有基础来实现,其中核心系统可重复用于为ADAS和AD系统测试功能强大的ECU,同时节省时间。此外还提供可扩展性,目前可以测试具有5到10个总线连接和数据接口的ECU;未来测试还会扩展至30个或更多接口。
完整的HIL模拟器开发包括HIL试验台的机械和电气设计,涵盖了工作和产品安全的所有方面。
PXI系统的配置如下:
PXIe-1082机箱
PXIe-8840 Intel i7四核,8 GB RAM,320 GB硬盘
PXI-6683定时和同步模块
2个PXI-8512 CAN-FD总线接口
其他HIL系统组件:
采用Ubuntu操作系统的19英寸HIL控制PC机
12 V直流电源
16安培电源插口
外部MIPI/CSI-2和SPI再注入设备
HIL实时操作和再注入数据流的软件架构包括:
ROS(C++)节点,用于处理记录的雷达数据
LabVIEW组件,用于HIL实时操作、总线通信和同步
脚本和其他软件组件,用于启用远程控制和操作,以及连接至SystemLink服务器
凭借ZMS和采埃孚公司各自的竞争优势,NI协助建立了软件流程和维护。这有助于构建一个功能强大的模块化HIL软件库,从而为未来的HIL项目奠定基础,并为2022年成为“NI卓越中心”铺平了道路。 ZMS的软件开发依赖于基于Scrum的敏捷软件开发以及持续的集成和部署(CI/CD)的现有流程,如下图所示。
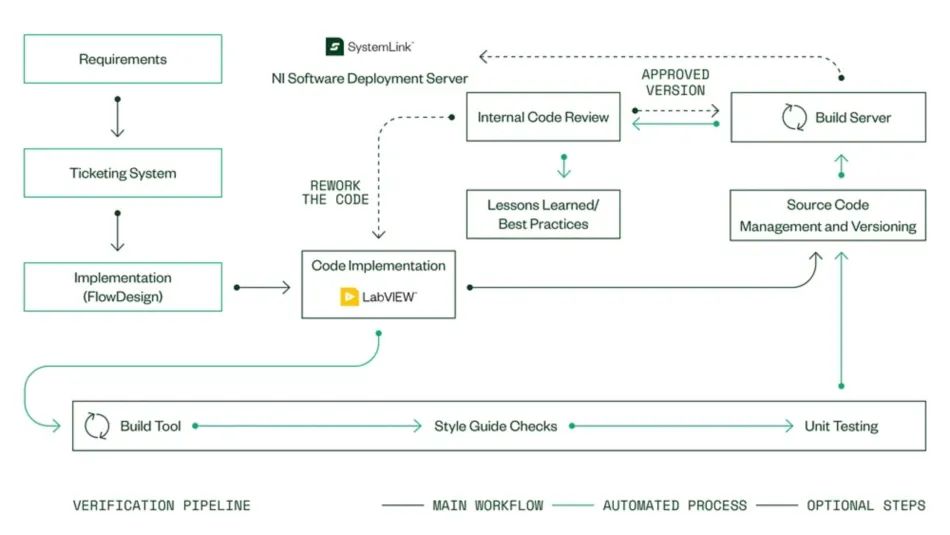
图: 软件开发流程
下图概述了HIL测试系统设置中数据流和通信之间的依赖关系。
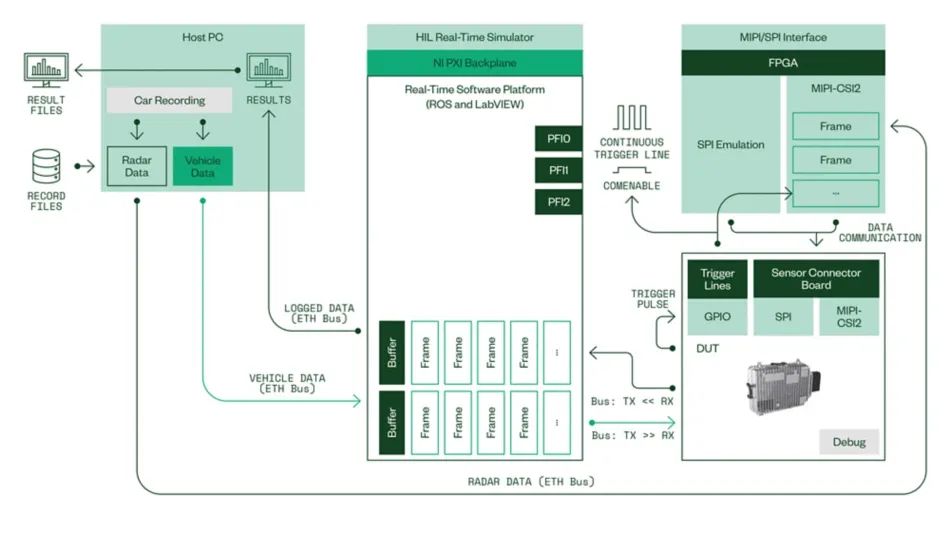
图: 软件开发流程
结果
随着HIL系统原型的开发并可复制至HIL集群中运行的多个HIL系统中,可以在全自动化HIL运行中通过大量的雷达软件测试周期实现雷达系统验证。这不仅赋予了在目标ECU平台上即时测试新软件版本更大的灵活性,而且还扩大了测试覆盖范围。 在雷达系统的开发过程中,相当于在HIL集群成功地再处理了600余天试验场测试操作的数据。 下图描述了将各种HIL测试系统作为一个HIL集群集成至系统开发和验证过程的流程。
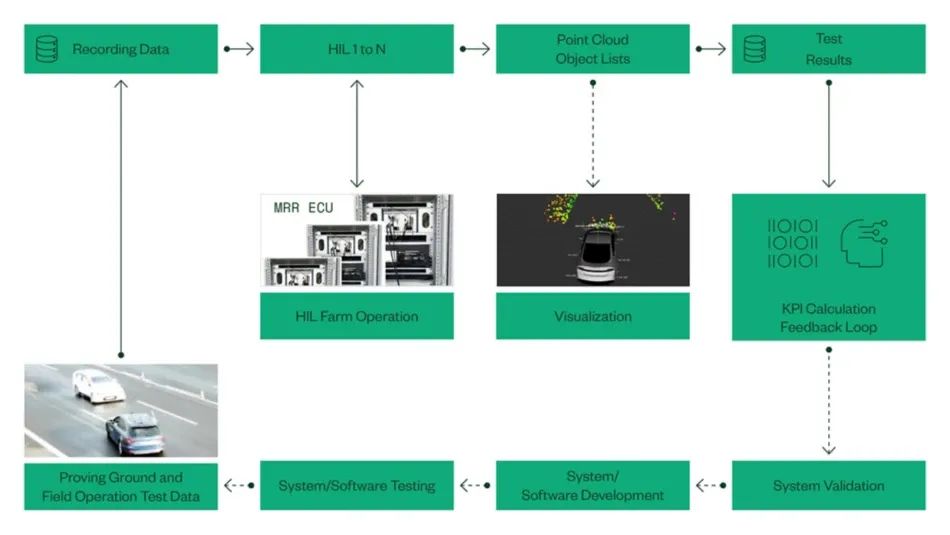
图:系统开发和验证流程
将HIL原型开发扩展至全天候HIL集群时,SystemLink的远程HIL实时软件部署、系统操作和维护功能就有了用武之处。NI的解决方案可帮助采埃孚节省时间并实现可扩展性。这意味着采埃孚的测试计划可以与自身的创新时间表保持一致。
来源:ADS智库
审核编辑:汤梓红
-
ADAS功能安全HiL仿真测试系统介绍#ADAS #VTHiL北汇信息POLELINK 2024-08-03
-
基于NI VeriStand的汽车ECU HIL测试2019-04-08 3119
-
精品推荐:ADAS电路设计集锦,学一招受用十年!2020-06-03 2657
-
硬件在环(HIL)测试系统架构2021-02-01 7756
-
基于HiL的转向系统测试台架解决方案2021-08-27 2559
-
ADAS HIL仿真测试解决方案2016-12-30 2227
-
ADAS开发及测试系统解决方案2019-05-09 2910
-
具有兼容法规的丰富测试场景-意昂神州ADAS HiL测试系统2020-04-29 1281
-
新能源汽车ADAS整车在环虚拟仿真测试2020-05-15 2028
-
探究HIL硬件在环测试2021-11-01 4575
-
8月30日直播|新能源汽车三电HiL测试系统方案揭秘!2023-08-30 1658
-
ADAS验证的关键技术:HIL测试系统概述2023-11-29 2031
-
康谋方案 | 基于场景的端到端硬件在环(HiL)测试智能解决方案2024-01-31 2109
-
汽车硬件在环(HIL)之车身电子测试解析2025-07-03 3039
-
高性价比ECU测试验证方案:虹科PCAN-USB Pro FD助力打造更加灵活的 HiL 测试平台2026-04-21 576
全部0条评论

快来发表一下你的评论吧 !
