

地平线机器人数字输入编程
描述
引脚复用配置工具
虽然从硬件上看,扩展出来的引脚只有40个,不过大部分引脚还可以配置成多种功能,这样延伸出来变化可就多了,那如何配置引脚的不同功能呢?
我们可以使用旭日X3派中提供的srpi-config工具进行配置。
直接在终端中输入这个指令,就可以看到这样的窗口,okay配置对应管脚为专用功能,disabled配置对应管脚为GPIO模式,按照自己的需要进行配置即可,配置完成后重启才会生效。
了解了GPIO的概念,接下来我们就要开始编程啦。
数字输入编程
首先我们来看下最基本的数字输入测试,读取一个按键的状态。
硬件接线
我们将按键的一边连接到旭日X3派的38号引脚上,这是一个GPIO的接口,另一边连接到39号引脚,也就是GND。
原理很简单,按键没按下时,导线是断开的,GPIO是默认的状态,按键按下后,导线就会导通,GPIO的状态变成了GND。
这样,我们就可以通过电平的变化,知道按键的状态啦。
运行例程
我们不妨来运行一下,看下实际效果是不是这样。
$ sudo python3 simple_input.py
我们将一个按键开关接到对应的管脚上, 然后连接到旭日X3PI当中,运行刚才的程序。之后我们按下或是松开按键时,他都会打印出对应的电平变化。
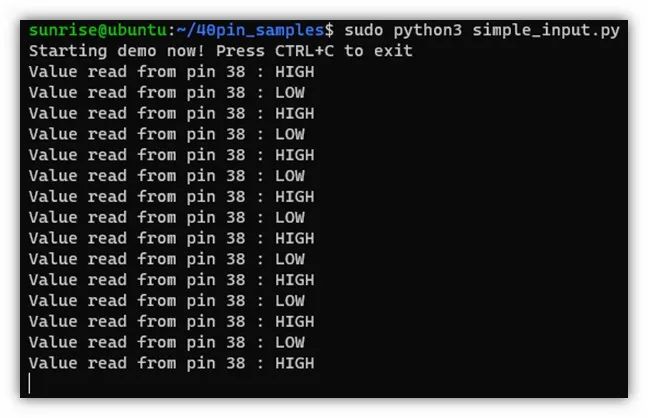
按下显示的就是LOW,也就是低电平,松开就是HIGH,也就是高电平。
代码解析
数字输入的功能实现啦,我们来看下代码是如何实现的。
simple_input.py:
#!/usr/bin/env python3
import Hobot.GPIO as GPIO
import time
# 定义使用的GPIO通道为38
input_pin = 38 # BOARD 编码 38
def main():
prev_value = None
# 设置管脚编码模式为硬件编号 BOARD
GPIO.setmode(GPIO.BOARD)
# 设置为输入模式
GPIO.setup(input_pin, GPIO.IN)
print("Starting demo now! Press CTRL+C to exit")
try:
while True:
# 读取管脚电平
value = GPIO.input(input_pin)
if value != prev_value:
if value == GPIO.HIGH:
value_str = "HIGH"
else:
value_str = "LOW"
print("Value read from pin {} : {}".format(input_pin, value_str))
prev_value = value
time.sleep(1)
finally:
GPIO.cleanup()
if __name__=='__main__':
main()
我们在Python中需要引入X3Pi的GPIO库,从而使用对应的GPIO功能。主函数里首先需要定义了一个变量来存储这个管脚的电平信号。
进行初始化,设置管脚的编码模式为BOARD模式,之后定义输入用的管脚,这里使用的是BOARD编码,因为他是第38个管脚,所以为38号。之后的话就会进入到循环当中,这样的一个函数就可以读出当前的电平值。
没有按下按键的时候,38管脚和GND是断开的,他就是高电平,按下按键时,就和GND导通了,这个管脚就会编程低电平。
如果电平值和上一次存储的不一致,后面的判断就会判断出是升高还是降低,最后会把结果打印出来。松开按键时同理。
-
地平线RDK系列再升级,NodeHub惊喜发布2023-07-26 1912
-
地平线:集齐“三剑客”,让人人都能会造机器人2023-07-31 4515
-
Horizon Hobot Platform,地平线机器人平台带来了哪些革新?2022-06-20 2786
-
【地平线旭日X3派试用体验】开箱篇硬件介绍2022-07-26 7167
-
地平线机器人获硅谷投资家yuri投资_地平线获英特尔领投近亿美金A+轮融资2018-01-04 3118
-
地平线机器人上市了吗?地平线机器人目前估值多少2018-04-24 36649
-
地平线推出国内首个AI轮足机器人开发平台—刑天2022-06-15 4984
-
奥比中光入驻地平线机器人开发平台2022-08-05 963
-
地平线GitLab使用指导2022-11-04 1466
-
科沃斯最新款扫地机器人搭载地平线旭日3芯片上市2023-08-25 4286
-
地平线助力鉴智机器人多款中阶方案斩获定点合作2024-07-30 1401
-
地平线港股IPO获证监会备案2024-08-13 1153
-
中国自动驾驶第一股的地平线机器人正式上市2024-10-25 2849
-
智驾科技企业地平线登陆港交所2024-10-28 1090
-
奥比中光与地平线、地瓜机器人达成战略合作2025-08-12 2033
全部0条评论

快来发表一下你的评论吧 !
