

分布式网络分组和通信
描述
分布式网络分组
没问题,ROS2提供了一个DOMAIN的机制,就类似分组一样,处于同一个DOMAIN中的计算机才能通信,我们可以在电脑和旭日X3派端中加入这样一句配置,即可将两者分配到一个小组中:
$ export ROS_DOMAIN_ID=< your_domain_id >
如果分配的ID不同,则两者无法实现通信。
话题分布式通信
之前编写的例程是否可以在不修改任何代码的情况下,直接使用呢?
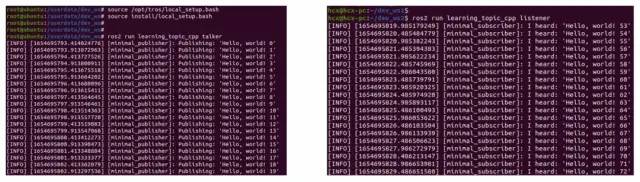
以话题通信为例,旭日派作为发布者,发布Hello World字符串,电脑作为订阅者,订阅Hello World字符串,我们看下效果如何。
$ ros2 run learning_topic_cpp talker # 旭日派端
$ ros2 run learning_topic_cpp listener # PC端
好啦,我们在分布式网络中测试了ROS一系列例程,都没有任何问题,在实际的机器人开发中,类似的方法会频繁用到,我们几乎不需要任何配置,代码也不需要做任何修改,一切都会变得如此轻松。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
分布式软件系统2009-07-22 5469
-
《无线通信FPGA设计》分布式FIR的并行改写2017-02-26 3844
-
如何设计分布式干扰系统?2019-08-08 2646
-
分布式数据库有什么优缺点?2019-09-24 3257
-
如何利用FPGA设计无线分布式采集系统?2019-10-14 2539
-
分布式系统的优势是什么?2020-03-31 3205
-
怎么实现分布式测试系统的一种网络通信设计2021-05-08 1755
-
一文带你看懂分布式软总线在家庭场景的应用2022-01-06 2640
-
分布式软总线实现近场设备间统一的分布式通信管理能力如何?2022-03-16 3361
-
基于CAN总线构成的分布式通信网络的应用2011-03-22 693
-
分布式网络电源保护2011-05-02 962
-
CAN总线实现工业网络分布式测控系统2011-09-08 2625
-
分布式通信是什么 分布式网络搭建2023-11-27 2115
-
什么是分布式架构?2024-01-12 3188
-
分布式通信的原理和实现高效分布式通信背后的技术NVLink的演进2024-11-18 2839
全部0条评论

快来发表一下你的评论吧 !
