

机器人零拷贝数据传输编程开发
描述
编程开发
为了方便大家使用,TogetherROS针对零拷贝功能进行了封装,风格类似ROS2中话题通信的接口,还是话题通信一样的流程,我们只需要修改几个函数就可以实现啦。
运行例程
$ source /opt/tros/local_setup.bash
$ source install/local_setup.bash
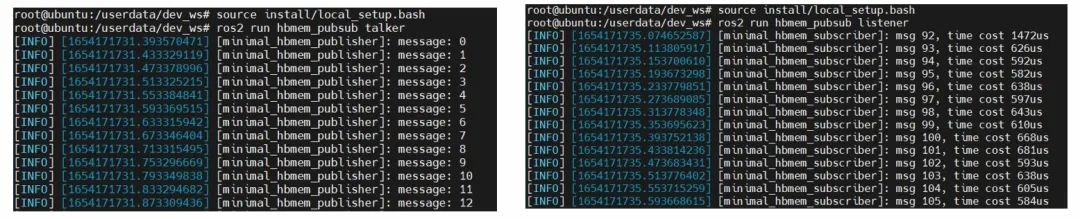
$ ros2 run hbmem_pubsub talker
$ ros2 run hbmem_pubsub listener
代码解析
发布者publisher_hbmem.cpp:
#include < chrono >
#include < functional >
#include < memory >
#include < string >
#include "rclcpp/rclcpp.hpp"
#include "hbmem_pubsub/msg/sample_message.hpp"
using namespace std::chrono_literals;
class MinimalHbmemPublisher : public rclcpp::Node {
public:
MinimalHbmemPublisher () : Node("minimal_hbmem_publisher"), count_(0) {
// 创建publisher_hbmem,topic为"topic",QOS为KEEPLAST(10),以及默认的可靠传输
publisher_ = this- >create_publisher_hbmem< hbmem_pubsub::msg::SampleMessage >(
"topic", 10);
// 定时器,每隔40毫秒调用一次timer_callback进行消息发送
timer_ = this- >create_wall_timer(
40ms, std::bind(&MinimalHbmemPublisher ::timer_callback, this));
}
private:
// 定时器回调函数
void timer_callback() {
// 获取要发送的消息
auto loanedMsg = publisher_- >borrow_loaned_message();
// 判断消息是否可用,可能出现获取消息失败导致消息不可用的情况
if (loanedMsg.is_valid()) {
// 引用方式获取实际的消息
auto& msg = loanedMsg.get();
// 获取当前时间,单位为us
auto time_now =
std::chrono::duration_cast< std::chrono::microseconds >(
std::chrono::steady_clock::now().time_since_epoch()).count();
// 对消息的index和time_stamp进行赋值
msg.index = count_;
msg.time_stamp = time_now;
// 打印发送消息
RCLCPP_INFO(this- >get_logger(), "message: %d", msg.index);
publisher_- >publish(std::move(loanedMsg));
// 注意,发送后,loanedMsg已不可用
// 计数器加一
count_++;
} else {
// 获取消息失败,丢弃该消息
RCLCPP_INFO(this- >get_logger(), "Failed to get LoanMessage!");
}
}
// 定时器
rclcpp::TimerBase::SharedPtr timer_;
// hbmem publisher
rclcpp::PublisherHbmem< hbmem_pubsub::msg::SampleMessage >::SharedPtr publisher_;
// 计数器
size_t count_;
};
int main(int argc, char * argv[])
{
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared< MinimalHbmemPublisher >());
rclcpp::shutdown();
return 0;
}
订阅者subscriber_hbmem.cpp:
#include < memory >
#include "rclcpp/rclcpp.hpp"
#include "hbmem_pubsub/msg/sample_message.hpp"
class MinimalHbmemSubscriber : public rclcpp::Node {
public:
MinimalHbmemSubscriber () : Node("minimal_hbmem_subscriber") {
// 创建subscription_hbmem,topic为"sample",QOS为KEEPLAST(10),以及默认的可靠传输
// 消息回调函数为topic_callback
subscription_ =
this- >create_subscription_hbmem< hbmem_pubsub::msg::SampleMessage >(
"topic", 10,
std::bind(&MinimalHbmemSubscriber ::topic_callback, this,
std::placeholders::_1));
}
private:
// 消息回调函数
void topic_callback(
const hbmem_pubsub::msg::SampleMessage::SharedPtr msg) const {
// 注意,msg只能在回调函数中使用,回调函数返回后,该消息就会被释放
// 获取当前时间
auto time_now =
std::chrono::duration_cast< std::chrono::microseconds >(
std::chrono::steady_clock::now().time_since_epoch())
.count();
// 计算延时并打印出来
RCLCPP_INFO(this- >get_logger(), "msg %d, time cost %dus", msg- >index,
time_now - msg- >time_stamp);
}
// hbmem subscription
rclcpp::SubscriptionHbmem< hbmem_pubsub::msg::SampleMessage >::SharedPtr
subscription_;
};
int main(int argc, char * argv[])
{
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared< MinimalHbmemSubscriber >());
rclcpp::shutdown();
return 0;
}
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
是否有方法可以实现从 GPU (OpenCL) 到 NPU 的零拷贝数据传输?2026-05-28 47
-
什么是零拷贝技术2023-11-27 1308
-
Motoman机器人离线编程2021-09-07 2320
-
机器人与编程的区别2021-09-01 2374
-
stm32的几种数据传输总结2021-08-23 2149
-
数据传输指令2021-07-27 1921
-
工业机器人应用编程考核设备分享2021-07-01 2893
-
智能救援机器人的功能和作用2020-11-30 5185
-
XtremIO 集成拷贝数据管理 (iCDM)2016-12-25 731
-
自己开发的机器人图形化编程软件2016-07-02 13774
-
使用banana PI 作为管道机器人控制及数据传输2014-08-09 6083
-
数据传输速率是什么意思2010-03-18 5313
-
Modem数据传输标准2009-12-28 1384
-
数据传输2006-03-25 1002
全部0条评论

快来发表一下你的评论吧 !
