

机器人多节点话题通信模型介绍
描述
节点实现了机器人各种各样的功能,但这些功能并不是独立的,之间会有千丝万缕的联系,其中最重要的一种联系方式就是话题,它是节点间传递数据的桥梁。
通信模型
以两个机器人节点为例。A节点的功能是驱动相机这个硬件设备,获取得到相机拍摄的图像信息,B节点的功能是视频监控,将相机拍摄到的图像实时显示给用户查看。
大家可以想一下,这两个节点是不是必然存在某种关系?没错,节点A要将获取的图像数据传输给节点B,有了数据,节点B才能做这样可视化的渲染。
此时从节点A到节点B传递图像数据的方式,在ROS中,我们就称之为话题,它作为一个桥梁,实现了节点之间某一个方向上的数据传输。
发布/订阅模型
从话题本身的实现角度来看,使用了基于DDS的发布/订阅模型,什么叫发布和订阅呢?
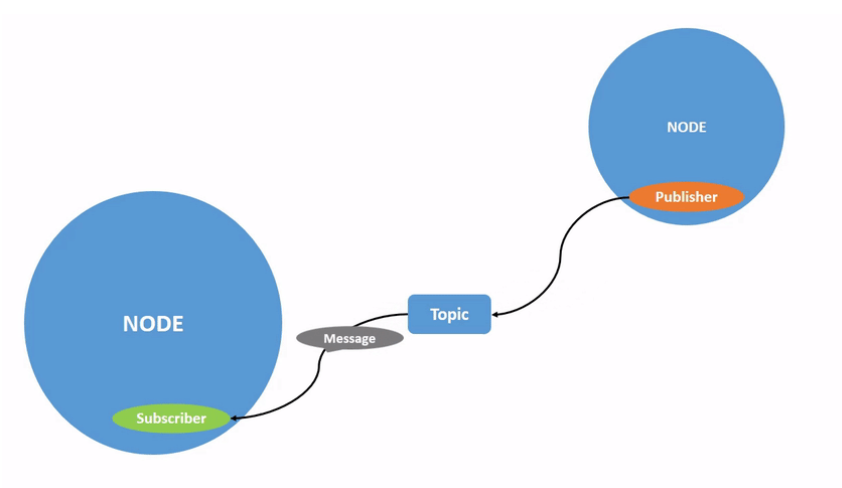
话题数据传输的特性是从一个节点到另外一个节点,发送数据的对象称之为发布者,接收数据的对象称之为订阅者,每一个话题都需要有一个名字,传输的数据也需要有固定的数据类型。

打一个比方,大家平时应该也会看微信公众号,比如有一个公众号,它的名字叫做“古月居”,这个古月居就是话题名称,公众号的发布者是古月居的小编,他会把组织好的机器人知识排版成要求格式的公众号文章,发布出去,这个文章格式,就是话题的数据类型。
如果大家对这个话题感兴趣,就可以订阅“古月居”,成为订阅者之后自然就可以收到古月居的公众号文章,没有订阅的话,也就无法收到。
类似这样的发布/订阅模型在生活中随处可见,比如订阅报纸、订阅杂志等等。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
Al大模型机器人2024-07-05 2488
-
机器人通信模型有哪些2023-11-27 1827
-
什么是通信模型DDS2023-11-24 2946
-
基于VxWorks实时操作系统的通信模型该怎样去设计?2021-04-26 1618
-
电力通信模型自动生成方法及其优化2018-02-02 814
-
基于Zigbee的无线智能输液通信模型设计杨艳2017-03-16 762
-
网络通信模型2016-03-15 786
-
机器人多传感器测距系统研究与设计2015-12-23 589
-
基于VxWorks的通信模型设计2012-06-01 1461
-
数据网格中基于优化机制的通信模型2009-06-25 724
-
移动Agent位置透明通信模型的设计2009-04-16 897
全部0条评论

快来发表一下你的评论吧 !
