

实现EthernetIP的机器人和profinet的西门子通信的方案
电子说
描述
1 功能需求
随着工业化升级的推进,在很多项目中会使用到机器人,比如库卡、发那科等品牌。如果需要对机器人进行联网,或者和其他控制plc等连接,就需要采集机器人的数据。但是对于一般的工控项目来讲,工程师没有时间去深入研究这些设备的通信协议。而且项目施工周期短,资金有限,这就需要能够快速、方便的实现和机器人进行通信。在国内外很早就有类似的产品,来实现不同协议的设备的互联互通,这类产品就是协议转换网关。它起到一个设备间桥梁的作用,快速实现设备之间的连接。
2 机器人的设置
库卡,发那科的机器人都支持ethernetip协议。这个协议是一个标准的现场总线协议。首先我们需要知道机器人的配置信息。这个信息可以从两个方面来获取。机器人的eds文件,这个文件中包含了机器人的配置信息,但是要确认这个文件的信息和正在使用的机器人是一致的。文件的内容格式如下,可以通过分析这个参数文件,获取机器人的配置信息。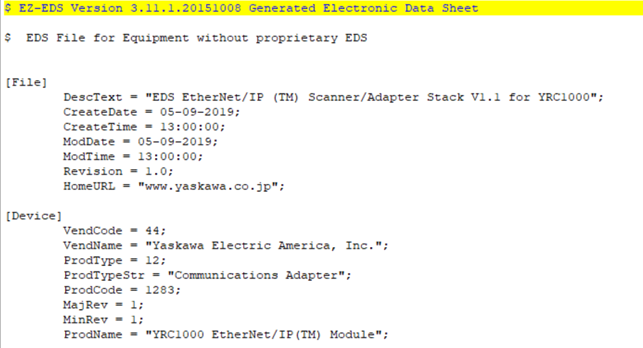
另外一中就是从机器人的屏幕上查看配置信息,如下图,获取到这些信息就可以采集到机器人中的数据。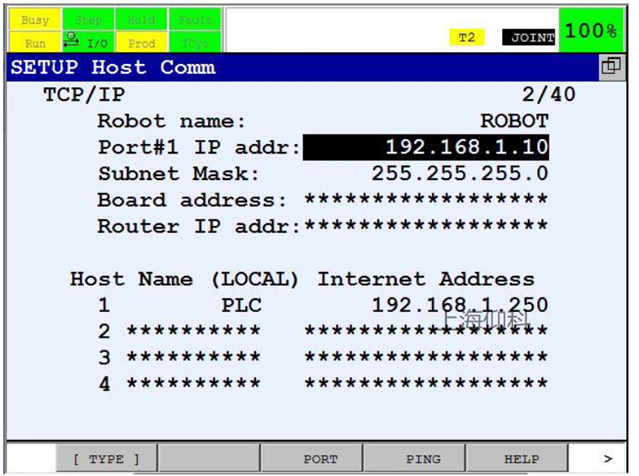
[]()
3 设备连接和配置参数
我们使用一个协议转换的网关,把机器人的配置参数配置到网关里,网关就可以自动、定时采集机器人设备中的数据。网络连接如下图。
一般需要配置如下参数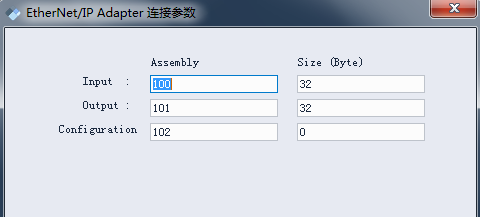
添加要采集的数据。需要知道这个点位的地址和数据类型,填写到如下的选项中。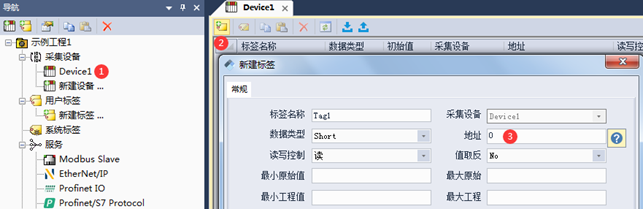
写数据到EIP设备的配置如下,读写类型设置成“写”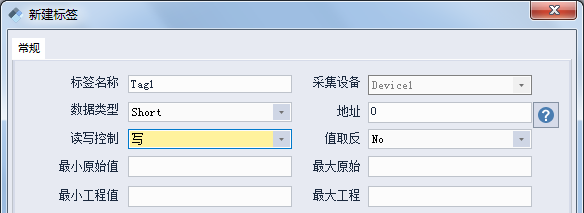
配置完成后点击菜单“下载”,把工程下载到网关里。
点击菜单“查看数据”,查看网关采集到的数据。对比一下当前值,“状态”显示Good,更新时间为当前时间就代表采集到了数据。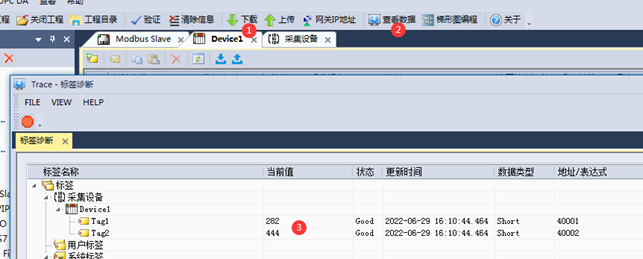
4 数据转发给西门子PLC
- 通过上面的操作,我们采集到了机器人的数据,同样可以在网关里配置,把数据转成成常用的modbus,profinet,CClink等工业协议。下面我们以转发成profinet为例进行说明。
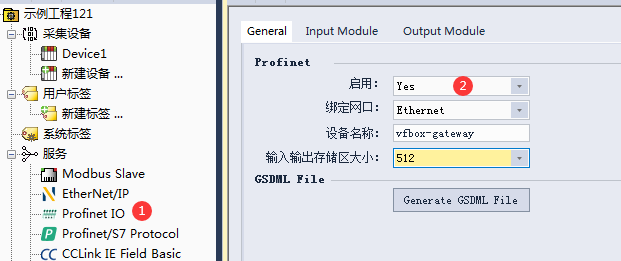
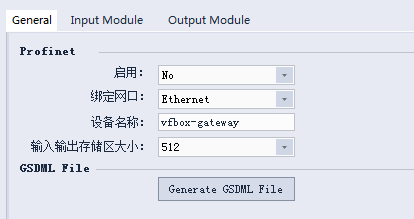
- 打开VFBOX Studio软件。点击菜单 Profinet IO。启用设置成Yes。
- 把数据分别加到Input Module和Output
Module下。Input Module是网关发送给PLC的数据。Output是PLC发送给网关的数据。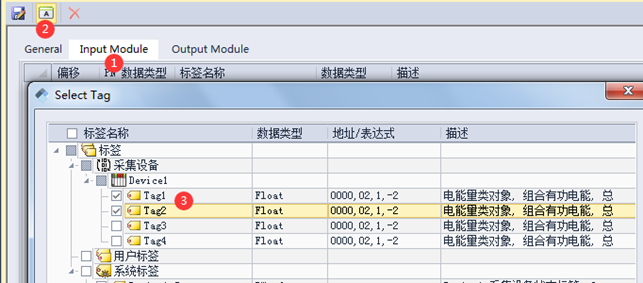
- 设置完成后,点击“下载”,把工程下载到网关中,则网关启动了Profinet IO功能。
- 下载完成后,点击“Generate GSDML File”生成GSD文件,导入到其他设备中组态。先点击下载工程,再生成GSD文件。
- 导入到博途时,需要把下面两个地方的时间设置成如下的值,或者比图中的设置值更大。
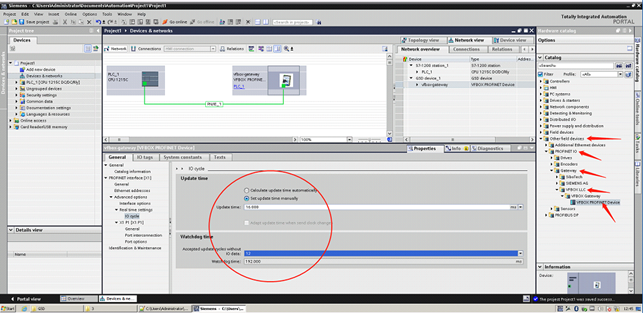
- 博途中要“ 手动 ”设置网关IP地址和网关的名称。
- 完成以上操作后,西门子PLC就可以通过网关和机器人设备进行通信了。




5 总结
通过上面的操作步骤,可以看到很方便的就实现了机器人和西门子之间的通信。因此在项目实施中,完全可以不需要了解各种复杂的现场总线协议,只要明确需求,使用网关设备就很容易的实现设备之间的数据交换。
-
雅马哈机器人配置方法之西门子S7-1500控制技巧分享2020-04-27 17550
-
ABB工业机器人与西门子S-1200 PLC通信的实现2022-08-05 16737
-
Profinet转EthernetIP网关连接HCS-6100系统配置2024-01-11 1680
-
西门子S7-1500系列PLC控制的6轴机器人系统解析2020-03-29 11613
-
实现Modbus设备转Profinet IO协议接西门子PLC的解决方案2022-09-30 2595
-
西门子Profinet连接EtheCAT伺服驱动器2022-10-21 1552
-
西门子Smart200PLC如何实现Profinet通信2023-08-14 17179
-
EPR6-S工业机器人通过EtherCAT转profinet网关接入西门子系统2023-10-24 1805
-
实现ABplc机器人的EthernetIP转西门子的profinet IO的应用2023-11-28 1554
-
ABB机器人与西门子PLC的Profinet通讯设置2024-06-17 13148
-
EtherNetIP转Profinet网关连接发那科机器人配置实例解析2024-11-18 2098
-
跨协议探秘:profinet转ethernet ip网关搞定川崎机器人与PLC通信2025-06-08 1179
-
颠覆智造:profinet转ethernet ip网关×发那科×西门子的三国杀2025-06-16 1026
-
当焊接机器人遇上西门子PLC:PROFINET转EthernetIP网关搞定车身制造通信难题2025-07-24 715
-
开疆智能ModbusTCP转Profient网关连接西门子PLC与川崎机器人配置案例2025-07-26 1782
全部0条评论

快来发表一下你的评论吧 !
