

如何在树莓派Pico上使用摇杆?
电子说
1.4w人已加入
描述
模拟二轴拇指操纵杆(俗称摇杆)是一种模拟操纵杆,相比于「方向」操纵杆更加准确和灵敏,它带有一个「按下选择按钮」。因为它是模拟的,所以需要使用树莓派 Pico 上支持模拟输入的引脚来读取,下面我们选择的是 GP26 和 GP27。分别来读取 X 和 Y。而按钮按下状态可使用数字引脚 GP22 来读取。
硬件连接
摇杆的 GND 接 Pico 的 GND。
摇杆的 +5V 接 Pico 的 VSYS。
摇杆的 VRX 接 Pico 的 GP27。
摇杆的 VRY 接 Pico 的 GP26。
摇杆的 SW 接 Pico 的 GP22。
编程
具体代码如下。其中当读取到的模拟量不超过 600 时判定为「左」或者「下」,而当读取到的模拟量大于或等于 60000 时判定为「右」或者「上」,介于这中间时判定为「中」。这个标准也可以微调来控制摇杆的灵敏度。
import machine
import utime
X_axis = machine.ADC(26)
Y_axis = machine.ADC(27)
press = machine.Pin(22, machine.Pin.IN, machine.Pin.PULL_UP)
while True:
X_axis_value = X_axis.read_u16()
Y_axis_value = Y_axis.read_u16()
if X_axis_value <= 600:
print("X: "+"Left ", end='')
elif X_axis_value >= 60000:
print("X: "+"Right ", end='')
elif 600 < X_axis_value < 60000:
print("X: "+"Middle ", end='')
if Y_axis_value <= 600:
print("Y: "+"Down")
elif Y_axis_value >= 60000:
print("Y: "+"Up")
elif 600 < Y_axis_value < 60000:
print("Y: "+"Middle")
if press.value() == 0:
print("Pressed")
utime.sleep(0.5)
运行之后,上下左右拨动摇杆,可以看到 Shell 窗口输出的方向变化。按下摇杆,会看到 Shell 窗口输出「Pressed」。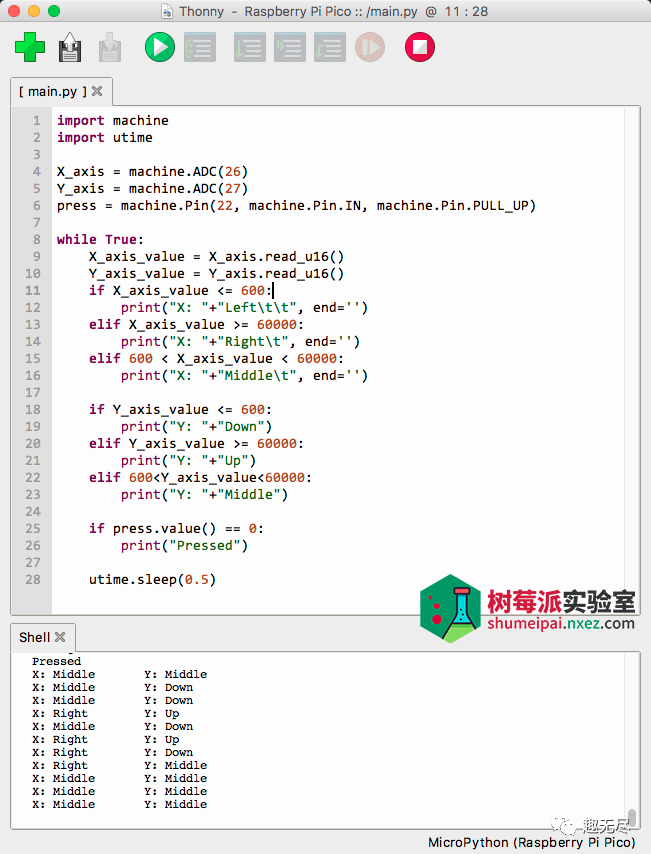
审核编辑:刘清
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
如何在树莓派Pico上用PWM实现LED呼吸灯呢?2023-10-07 2634
-
树莓派pico入门学习笔记(一)相关资料推荐2021-07-01 2160
-
树莓派pico如何入门?2021-10-13 2242
-
树莓派Pico的相关资料分享2021-11-03 1981
-
树莓派Pico的相关资料推荐2022-02-07 1860
-
在树莓派Pico上实现怀旧的AppleII仿真2022-05-24 11307
-
远程控制树莓派3b上的pi pico2021-03-05 5605
-
树莓派也出MCU了?树莓派Pico来了!2021-10-28 1198
-
树莓派Pico:仅4美元的MCU2021-12-04 1046
-
树莓派pico入门学习笔记(一)2021-12-17 1335
-
距离检测报警使用树莓派Pico2022-11-09 698
-
基于树莓派pico的可编程游戏手柄设计2022-12-26 1948
-
树莓派PICO pio使用2023-10-18 4253
-
如何在树莓派Pico上使用红外线接收模块?2023-11-30 4154
-
树莓派 Pico 2040 的“速度狂飙”:时钟速度几乎翻倍!2025-03-25 1582
全部0条评论

快来发表一下你的评论吧 !
