

带PID的数字输出控制示例解析
描述
PID控制是一种算法,用于控制输出,以便将某个过程保持在精确值。一些例子包括:
控制船上的舵的位置以便驶向特定的方向。
控制提供给加热元件的功率,以保持特定的温度。
控制汽车的发动机油门以保持特定的速度(“巡航控制”)。
控制飞机副翼的位置以保持特定的旋转速度。
控制水处理厂中化学药品加入水流的速度。
PID有三个变量,即输入、输出和设定值。PID算法控制输出,以使输入与设定值相匹配。
例如,在控制船舵以驶向特定航向的场景中:
输入是指南针或GPS航向。
设定点是期望的航向。
输出是舵角。
输入和设定点之间的差异称为误差,PID算法旨在消除过程中的误差。为了理解为什么需要PID,让我们先来看看更简单的过程控制方法。
棒棒控制
Bang-bang控制是一种数字形式的控制,输出要么完全打开(最大值),要么完全关闭(最小值),两者之间没有任何东西。当输出也是数字时,这种控制似乎更直观;例如完全打开或关闭的阀门,或者可以打开或关闭的空调。使用空调的例子,输入将由温度传感器提供,并且设定点将是要保持的期望温度。算法很简单:
If the measured temperature is above the setpoint then we turn the air-conditioner on, otherwise we switch it off.对于某些应用程序,这可能工作得很好。然而,对于其他人来说,可能会遇到两个问题中的一个或两个:
设定点附近的读数快速变化。
第一个问题是在设定点附近相对快速波动的读数。例如,假设设定值为20 ℃,根据房间周围的气流或温度传感器的稳定性,读数可能在例如20.1℃和20.0℃之间波动;每次温度读数仅比设定值高0.1°C时,空调就会再次打开,一旦读数再次达到20.0°C时,空调就会再次关闭。这可能会很快发生,这既会让房间里的人感到讨厌,也可能会损坏空调。。如果制冷和制热都可用,我们可以想象一个场景,温度在19.9°C和20.1°C之间波动,空调和加热器相对快速地开关——两者互相干扰,浪费能源。
解决方案是在设定点附近增加一些延迟或缓冲,这称为滞后。在我们的例子中,2°C的滞后意味着一旦温度达到20°C并且空调关闭,那么空调不会再次打开,直到温度再次上升到22°C。如果也有暖气,那么在温度降到18°C之前,暖气不会打开(但是一旦打开,在温度升到20°C之前不会再次关闭)。
过冲。
可能遇到的第二个问题是超调。指令输出和输入测量输出指令结果之间存在延迟时,通常会出现过冲。以在水处理厂向水流中添加化学物质为例:化学物质需要一段时间才能溶解到水中,因此我们只能在添加化学物质的下游一点点处测量结果,也许是pH值,也就是说,在这个过程中会有一些延迟。比方说,我们开始时pH值有点太低,所以我们打开阀门向水中添加碱,以便使pH值升高一点;这开始起作用,但是当我们在传感器上读取pH中性值并关闭阀门时,大量的碱已经被添加到上游,传感器读数远远超过中性值,我们开始获得非常高的pH值读数;现在,系统通过打开阀门向水中添加酸来对高pH读数做出反应,以便再次降低pH值——但当这种影响到达传感器时,我们再次超过中性,读数再次变得过低……该过程重复,输出继续在设定点附近摆动——可能比触发纠正反应的原始误差幅度更大。
如果我们看看控制船舵位置或汽车发动机油门位置的例子,那么同样更直观明显的是,需要一个比bang-bang更好的控制系统——如果只需要一个小的航向修正,我们不想将船舵摆动到最右(右舷)或最左(左舷);或者让汽车油门在踏板到金属和完全关闭之间摆动——我们需要介于两者之间的东西。
比例控制
比例控制(PID中的P)只做它所说的,并且控制输出与输入和设定点之间的差值成比例(与误差成比例)。如果输入和设定值之间的差异很小,那么我们仅对输出进行小的调整,如果差异很大,那么我们对输出进行大的调整。如果船只是稍微偏离了航向,那么我们只是稍微转动一下方向舵——我们不会把它转到底。对于某些系统来说,比例控制可能就是所需要的。然而,对于其他系统,会遇到下一种问题:
积分
使用比例控制时,几乎总是会有一定程度的稳态误差,这意味着系统不会完全达到设定值,因为接近设定值的比例控制量太小,不足以克服影响系统的某些偏差(可能是电流或风)。在下图中,过程稳定在设定值以下一点。
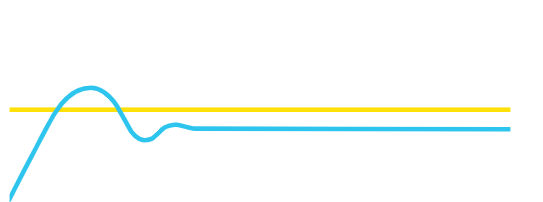
PID的积分(I)部分查看系统偏离设定值多长时间,并提升输出以克服该偏差。例如,如果汽车上的巡航控制设置为60英里/小时,但仅使用比例控制时,速度停留在57英里/小时(由于空气或其他阻力),那么PID的“积分”部分将随着时间的推移增加发动机功率,以使速度达到60英里/小时的设置。同样,对于某些控制器来说,PI控制可能就是全部所需。然而,在稳定之前,PI本身倾向于在设定点附近至少有一些过冲和振荡,特别是当设定点和输入读数之间存在大的初始差异时(例如在启动时或当对设定点进行大的调整时),因为PID的积分部分将在过渡期间累积所有的误差,并因此变大(比需要的更大),并且没有任何其他东西来抑制它,那么将再次减小它的唯一事情将是在相反方向上的一些累积误差。PID的D部分解决了这个问题:
导数
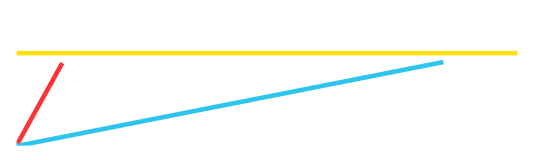
微分(PID中的D)元件通过根据其接近设定值的速度来缓和/抑制输出,从而最小化或消除过冲;如果输入读数非常快地向设定值移动,那么PID的微分部分将促使输出变缓,以便最小化或消除过冲。在数学中,曲线的导数是曲线在特定点的角度或梯度,即变化率,这就是这个术语的含义。在下图中,红线代表陡峭的梯度(这将导致PID算法中的大D校正),蓝线代表浅梯度(这将导致PID算法中的小D校正)。
调谐
PID算法中的每个元素——比例元素、积分元素和微分元素——都可以调整或加权,使其在算法中产生更大或更小的影响,正确的值因应用而异。PID调节是一个很深的主题,其全部深度超出了本文的范围,但是很好地理解P、I和D中每个元素的作用是一个很好的起点。选项包括为特定类型的流程、手动调整和模拟查找一些默认值。
手动调谐主要包括按顺序调谐P、I和D元件:
首先,I和D权重设置为零,P权重增加,直到系统开始在设定点附近振荡。然后,P权重被设置为该值的一半。
接下来,增加I权重,直到任何稳态误差被足够快地校正,但是不要太多以至于系统变得不稳定。
最后,增加D权重,直到任何过冲都被充分抑制,但没有抑制到系统响应迟缓甚至变得不稳定(尤其是在输入中有一些噪声的情况下会发生这种情况)。
带PID的数字输出控制
如果PID控制的输出是数字的,例如继电器或电磁阀,则可以使用脉宽调制等技术将数字输出有效地转换为模拟输出。PWM频率根据应用来选择,并且取决于系统,可以实施额外的约束,例如仅在占空比高于特定水平时才切换输出。
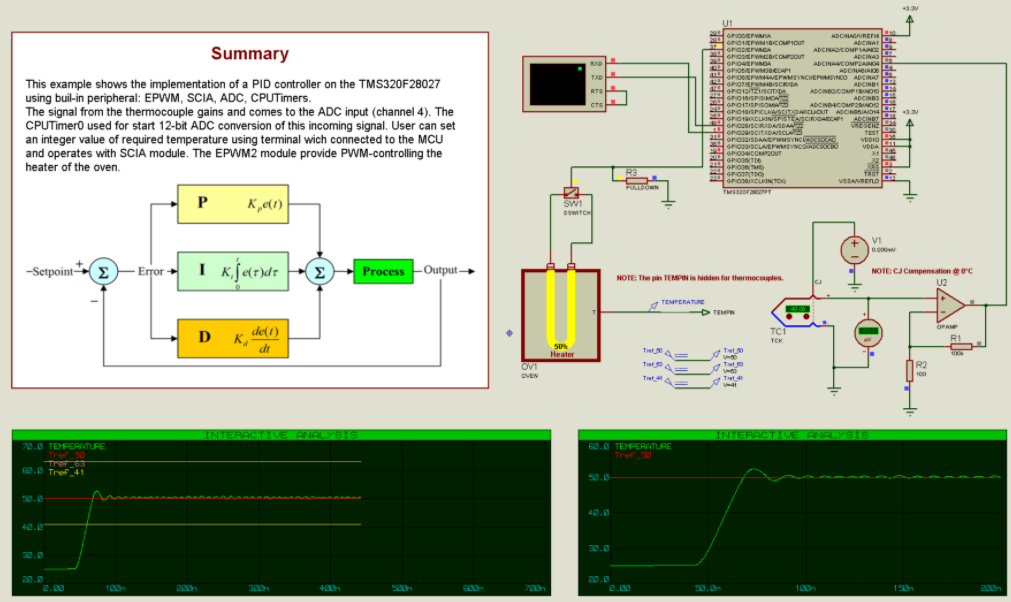
这是一个使用PICCOLO微控制器的烤箱PID控制示例,在中模拟变形VSM.
审核编辑:黄飞
-
控制算法PID之比例控制(P)的原理和示例代码2023-11-01 5217
-
使用C语言编写的热水器控制温度的PID算法示例2023-09-28 4462
-
单级PID控制带编码器的直流减速电机速度2023-05-16 799
-
数字PID控制的原理2023-03-09 3176
-
PID增量控制示例程序参考2021-09-07 1434
-
如何使用DSP进行数字PID控制器的设计2019-01-02 2272
-
数字PID控制算法教程之如何对标准PID算法进行改进2018-12-04 3158
-
pid控制器的输入输出_PID控制器的控制实现2018-06-01 31924
-
请问哪个系列的DSP的 C∕C++ 头文件和外设示例有PID控制的例程呢?2018-05-14 2710
-
数字PID控制2016-04-01 685
-
初步解析飞思卡尔控制电机PID算法代码2014-11-04 26552
-
数字PID控制算法讲解2012-01-16 4374
-
数字PID控制技术2010-04-28 578
-
数字PID控制实验2009-05-15 8679
全部0条评论

快来发表一下你的评论吧 !
