

ROS模型建立常见错误
描述
将 XACRO文件转换成 URDF 文件 并检查
转换的方法很简单,ROS封装了实现方法,我们只需进入xacro 所在的文件夹,然后键入如下命令即可:
rosrun xacro xacro.py rob.xacro > rob.urdf
为了检验我们的模型的准确性,我们进行简单的检查,在同一个目录下输入:
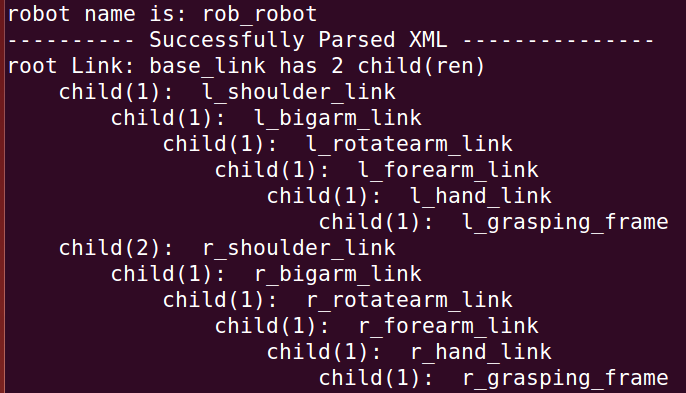
check_urdf rob.urdf
即可得到如下图显示,可以看到双臂的关节链接情况。
为了更直观的观看关节链接情况,我们在同一个目录下输入下面这行命令,就会得到 rob_robot.gv 和 file rob_robot.pdf 两个文件。
urdf_to_graphiz rob.urdf
5.在RViz中观看模型
编写 launch 文件,取名:description.launch ,内容如下:
< launch >
< arg name="model" / >
< !-- Parsing xacro and setting robot_description parameter -- >
< param name="robot_description" command="$(find xacro)/xacro.py $(find rob_description)/urdf/rob.xacro"/ >
< !-- Setting gui parameter to true for display joint slider -- >
< param name="use_gui" value="true"/ >
< !-- Starting Joint state publisher node which will publish the joint values -- >
< node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" / >
< !-- Starting robot state publish which will publish tf -- >
< node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher" / >
< !-- Launch visualization in rviz -- >
< node name="rviz" pkg="rviz" type="rviz" args="-d $(find rob_description)/urdf/urdf.rviz" required="true" / >
< /launch >
输入命令:
roslaunch rob_description description.launch
转动每个关节,检查无误后,模型建立完成,下一篇经介绍如何使用 MoveIt 控制 Rob 机器人。
Tips 建模常见错误
问题1:如果在查看模型时发现错误提示:No transform from [xxxx] to [base_link]
解决办法:出现这个错误首先要怀疑是你的xacro描述文件编写的格式出现了错误。
如头部多了空格、中间关键字拼写错误等,建议耐下心来逐行逐句检查语法。
问题2:源码中和xacro文件同一目录的 urdf.rviz 文件是什么作用?
答:所有的 .rviz 文件都是 Rviz 的配置文件,这里我们在launch 文件中制定了他的配置文件。
如果不指定Rviz 启动时会读取默认的配置文件,用户可以根据需求启动Rviz后在左上角工具栏上保存自己满意的配置文件。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器学习和深度学习中需避免的 7 个常见错误与局限性2026-01-07 427
-
机械制图常见错误汇总2023-12-26 2280
-
初学仿真常见的错误2023-12-03 7758
-
vlookup常见的12种错误2023-12-01 5822
-
机器人的ROS模型建立2023-11-28 1639
-
ros1和ros2的通信模型2023-11-27 2247
-
ROS部署PaddlePaddle的CV模型2023-10-20 1700
-
配置STM32-ROS通信常见的问题有哪些?2021-12-23 2133
-
PCB作业中常见14大错误2019-03-12 4829
-
如何建立芯片模型数据?2019-03-06 4604
-
基于深度学习模型的点云目标检测及ROS实现2018-11-05 19247
-
ROS机器人软件平台有哪些常用命令?ROS的常见命令详细资料免费下载2018-09-13 1617
-
Keil常见错误警告2016-08-29 855
-
SIMULINK简单模型的建立及模型特点2008-06-19 3027
全部0条评论

快来发表一下你的评论吧 !
