

TogetherROS系统的通信功能测试
描述
通信测试
先来测试一下TogetherROS™·Bot系统的通信功能。
我们需要启动两个终端,分别连接到旭日X3派上,并分别按以下命令配置环境变量。
终端1:
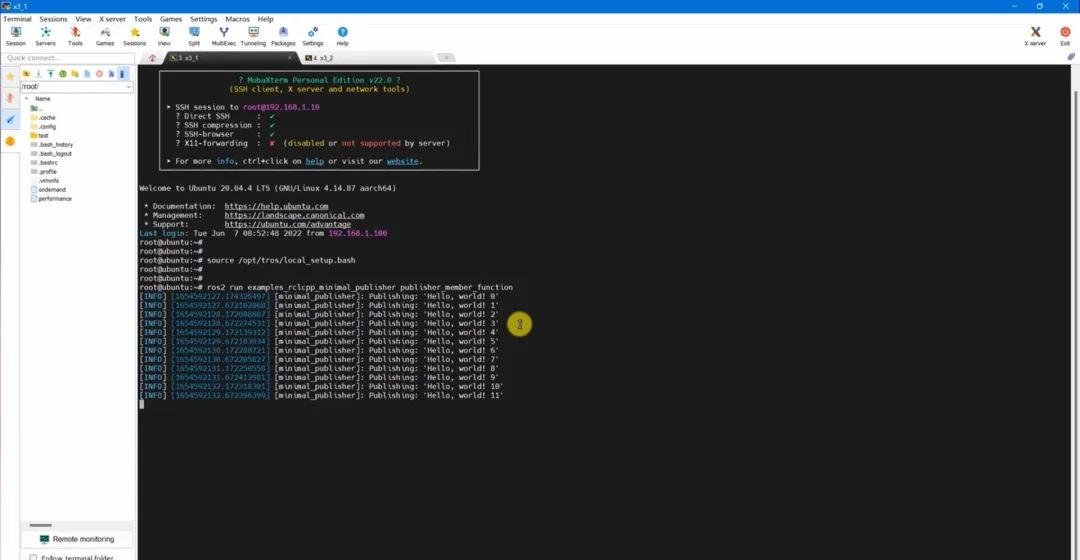
** source /opt/tros/local_setup.bash** ros2 run examples_rclcpp_minimal_publisher publisher_member_function
终端2:
** source /opt/tros/local_setup.bash** ros2 run examples_rclcpp_minimal_subscriber subscriber_member_function
接下来,我们用ros2 run命令运行节点:
运行第一个例程:
ros2 run example_rclcpp_minimal_publisher publisher_member_function
这是一个用C++写的最小化的发布者程序,其中节点叫publisher_member+function,按回车运行该节点。
可以看到这个节点开始不断循环发布信息,每次发布的信息为字符串形式,内容是“Hello,world! +数字”。
同样,在终端2的命令行窗口,输入以下命令并回车开启订阅者节点。
ros2 run examples_rclcpp_minimal_subscriber subscriber_member_function
这个订阅者节点会获取到、并显示出刚才发布者节点发布的信息。

通过这样一个例程,我们验证了两个节点之间的通信没有问题。这这是一个基于DDS的话题通信。
按CTRL+C可以关闭该例程。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
通用自动化测试系统:FCT、ATE、ICT、PCBA功能测试2026-04-13 717
-
NB-IOT类产品的通信功能生产测试方案2024-09-23 1876
-
TogetherROS系统中如何配置网络连接2023-12-01 1425
-
TogetherROS Bot相机驱动方法2023-11-24 1301
-
LabVIEW开发卫星通信的自动化测试系统2022-03-02 9404
-
通信设备自动测试系统案例2021-11-11 2381
-
纳特通信的多探头球面近场测试系统与紧缩场测试系统(远场)2021-06-21 3427
-
数据通信测试仪表功能概述2019-06-21 2819
-
无线通信系统的安装维护测试2017-10-27 5472
-
PCBA功能测试系统2013-10-09 5437
-
低压电力线通信点对点通信性能测试系统设计与实现2010-09-30 876
-
VXI/GPIB总线的通信设备测试诊断系统设计2009-11-16 4044
-
系统功能安全测试技术研究2009-01-06 830
-
用于功能测试系统设计的系统元件方法2006-03-24 583
全部0条评论

快来发表一下你的评论吧 !
