

嵌入式框架Zorb Framework状态机的实现
描述
Zorb Framework是一个基于面向对象的思想来搭建一个轻量级的嵌入式框架。
本次分享的是Zorb Framework的状态机的实现。
中小型嵌入式程序说白了就是由各种状态机组成,因此掌握了如何构建状态机,开发嵌入式应用程序可以说是手到拈来。
简单的状态机可以用Switch-Case实现,但复杂一点的状态机再继续使用Switch-Case的话,层次会变得比较乱,不方便维护。因此我们为Zorb Framework提供了函数式状态机。
状态机的功能
我们先来看看要实现的状态机提供什么功能:
初步要提供的功能如下:
1、可以设置初始状态
2、可以进行状态转换
3、可以进行信号调度
4、最好可以在进入和离开状态的时候可以做一些自定义的事情
5、最好可以有子状态机
因此,初步设计的数据结构如下:
/* 状态机结构 */
struct _Fsm
{
uint8_t Level; /* 嵌套层数,根状态机层数为1,子状态机层数自增 */
/* 注:严禁递归嵌套和环形嵌套 */
List *ChildList; /* 子状态机列表 */
Fsm *Owner; /* 父状态机 */
IFsmState OwnerTriggerState; /* 当父状态机为设定状态时,才触发当前状态机 */
/* 若不设定,则当执行完父状态机,立即运行子状态机 */
IFsmState CurrentState; /* 当前状态 */
bool IsRunning; /* 是否正在运行(默认关) */
/* 设置初始状态 */
void (*SetInitialState)(Fsm * const pFsm, IFsmState initialState);
/* 运行当前状态机 */
bool (*Run)(Fsm * const pFsm);
/* 运行当前状态机和子状态机 */
bool (*RunAll)(Fsm * const pFsm);
/* 停止当前状态机 */
bool (*Stop)(Fsm * const pFsm);
/* 停止当前状态机和子状态机 */
bool (*StopAll)(Fsm * const pFsm);
/* 释放当前状态机 */
bool (*Dispose)(Fsm * const pFsm);
/* 释放当前状态机和子状态机 */
bool (*DisposeAll)(Fsm * const pFsm);
/* 添加子状态机 */
bool (*AddChild)(Fsm * const pFsm, Fsm * const pChildFsm);
/* 移除子状态机(不释放空间) */
bool (*RemoveChild)(Fsm * const pFsm, Fsm * const pChildFsm);
/* 调度状态机 */
bool (*Dispatch)(Fsm * const pFsm, FsmSignal const signal);
/* 状态转移 */
void (*Transfer)(Fsm * const pFsm, IFsmState nextState);
/* 状态转移(触发转出和转入事件) */
void (*TransferWithEvent)(Fsm * const pFsm, IFsmState nextState);
};
关于信号,Zorb Framework做了以下定义:
/* 状态机信号0-31保留,用户信号在32以后定义 */
enum {
FSM_NULL_SIG = 0,
FSM_ENTER_SIG,
FSM_EXIT_SIG,
FSM_USER_SIG_START = 32
/* 用户信号请在用户文件定义,不允许在此定义 */
};
创建状态机:
bool Fsm_create(Fsm ** ppFsm)
{
Fsm *pFsm;
ZF_ASSERT(ppFsm != (Fsm **)0)
/* 分配空间 */
pFsm = ZF_MALLOC(sizeof(Fsm));
if (pFsm == NULL)
{
ZF_DEBUG(LOG_E, "malloc fsm space error
");
return false;
}
/* 初始化成员 */
pFsm->Level = 1;
pFsm->ChildList = NULL;
pFsm->Owner = NULL;
pFsm->OwnerTriggerState = NULL;
pFsm->CurrentState = NULL;
pFsm->IsRunning = false;
/* 初始化方法 */
pFsm->SetInitialState = Fsm_setInitialState;
pFsm->Run = Fsm_run;
pFsm->RunAll = Fsm_runAll;
pFsm->Stop = Fsm_stop;
pFsm->StopAll = Fsm_stopAll;
pFsm->Dispose = Fsm_dispose;
pFsm->DisposeAll = Fsm_disposeAll;
pFsm->AddChild = Fsm_addChild;
pFsm->RemoveChild = Fsm_removeChild;
pFsm->Dispatch = Fsm_dispatch;
pFsm->Transfer = Fsm_transfer;
pFsm->TransferWithEvent = Fsm_transferWithEvent;
/* 输出 */
*ppFsm = pFsm;
return true;
}
调度状态机:
/******************************************************************************
* 描述 :调度状态机
* 参数 :(in)-pFsm 状态机指针
* (in)-signal 调度信号
* 返回 :-true 成功
* -false 失败
******************************************************************************/
bool Fsm_dispatch(Fsm * const pFsm, FsmSignal const signal)
{
/* 返回结果 */
bool res = false;
ZF_ASSERT(pFsm != (Fsm *)0)
if (pFsm->IsRunning)
{
if (pFsm->ChildList != NULL && pFsm->ChildList->Count > 0)
{
uint32_t i;
Fsm * pChildFsm;
for (i = 0; i < pFsm->ChildList->Count; i++)
{
pChildFsm = (Fsm *)pFsm->ChildList
->GetElementDataAt(pFsm->ChildList, i);
if (pChildFsm != NULL)
{
Fsm_dispatch(pChildFsm, signal);
}
}
}
if (pFsm->CurrentState != NULL)
{
/* 1:根状态机时调度
2:没设置触发状态时调度
3:正在触发状态时调度
*/
if (pFsm->Owner == NULL || pFsm->OwnerTriggerState == NULL
|| pFsm->OwnerTriggerState == pFsm->Owner->CurrentState)
{
pFsm->CurrentState(pFsm, signal);
res = true;
}
}
}
return res;
}
篇幅有限,其它接口实现可阅读:
https://github.com/54zorb/Zorb-Framework
状态机测试
/**
*****************************************************************************
* @file app_fsm.c
* @author Zorb
* @version V1.0.0
* @date 2018-06-28
* @brief 状态机测试的实现
*****************************************************************************
* @history
*
* 1. Date:2018-06-28
* Author:Zorb
* Modification:建立文件
*
*****************************************************************************
*/
#include "app_fsm.h"
#include "zf_includes.h"
/* 定义用户信号 */
enum Signal
{
SAY_HELLO = FSM_USER_SIG_START
};
Fsm *pFsm; /* 父状态机 */
Fsm *pFsmSon; /* 子状态机 */
/* 父状态机状态1 */
static void State1(Fsm * const pFsm, FsmSignal const fsmSignal);
/* 父状态机状态2 */
static void State2(Fsm * const pFsm, FsmSignal const fsmSignal);
/******************************************************************************
* 描述 :父状态机状态1
* 参数 :-pFsm 当前状态机
* -fsmSignal 当前调度信号
* 返回 :无
******************************************************************************/
static void State1(Fsm * const pFsm, FsmSignal const fsmSignal)
{
switch(fsmSignal)
{
case FSM_ENTER_SIG:
ZF_DEBUG(LOG_D, "enter state1
");
break;
case FSM_EXIT_SIG:
ZF_DEBUG(LOG_D, "exit state1
");
break;
case SAY_HELLO:
ZF_DEBUG(LOG_D, "state1 say hello, and want to be state2
");
/* 切换到状态2 */
pFsm->TransferWithEvent(pFsm, State2);
break;
}
}
/******************************************************************************
* 描述 :父状态机状态2
* 参数 :-pFsm 当前状态机
* -fsmSignal 当前调度信号
* 返回 :无
******************************************************************************/
static void State2(Fsm * const pFsm, FsmSignal const fsmSignal)
{
switch(fsmSignal)
{
case FSM_ENTER_SIG:
ZF_DEBUG(LOG_D, "enter state2
");
break;
case FSM_EXIT_SIG:
ZF_DEBUG(LOG_D, "exit state2
");
break;
case SAY_HELLO:
ZF_DEBUG(LOG_D, "state2 say hello, and want to be state1
");
/* 切换到状态1 */
pFsm->TransferWithEvent(pFsm, State1);
break;
}
}
/******************************************************************************
* 描述 :子状态机状态
* 参数 :-pFsm 当前状态机
* -fsmSignal 当前调度信号
* 返回 :无
******************************************************************************/
static void SonState(Fsm * const pFsm, FsmSignal const fsmSignal)
{
switch(fsmSignal)
{
case SAY_HELLO:
ZF_DEBUG(LOG_D, "son say hello only in state2
");
break;
}
}
/******************************************************************************
* 描述 :任务初始化
* 参数 :无
* 返回 :无
******************************************************************************/
void App_Fsm_init(void)
{
/* 创建父状态机,并设初始状态 */
Fsm_create(&pFsm);
pFsm->SetInitialState(pFsm, State1);
/* 创建子状态机,并设初始状态 */
Fsm_create(&pFsmSon);
pFsmSon->SetInitialState(pFsmSon, SonState);
/* 设置子状态机仅在父状态State2触发 */
pFsmSon->OwnerTriggerState = State2;
/* 把子状态机添加到父状态机 */
pFsm->AddChild(pFsm, pFsmSon);
/* 运行状态机 */
pFsm->RunAll(pFsm);
}
/******************************************************************************
* 描述 :任务程序
* 参数 :无
* 返回 :无
******************************************************************************/
void App_Fsm_process(void)
{
ZF_DELAY_MS(1000);
/* 每1000ms调度状态机,发送SAY_HELLO信号 */
pFsm->Dispatch(pFsm, SAY_HELLO);
}
/******************************** END OF FILE ********************************/
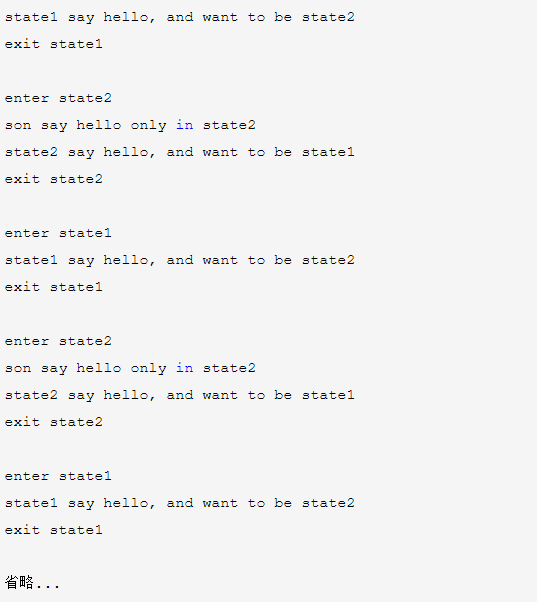
结果:
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
嵌入式框架Zorb Framework搭建方案2023-11-05 2817
-
如何生成状态机框架2023-09-13 1871
-
C语言实现嵌入式状态机简单描述与应用2023-05-20 2377
-
嵌入式状态机的设计与实现2023-04-14 3135
-
嵌入式状态机的编程优点分析2023-02-25 1652
-
嵌入式状态机的几种大牛才懂的操作2022-11-17 2108
-
嵌入式中状态机的设置2022-11-02 1912
-
嵌入式软件开发中常用的状态机编程实现2022-09-06 3451
-
嵌入式之状态机编程的概念是什么2021-12-22 1283
-
关于嵌入式应用框架(EAF)的分析2020-01-01 2309
-
嵌入式应用框架EAF详解2018-12-02 3491
-
有限状态机在嵌入式软件中的应用2016-07-26 873
-
有限状态机在嵌入式系统中的实现及应用2016-03-22 1047
-
状态机在嵌入式系统中的应用2011-05-23 2672
全部0条评论

快来发表一下你的评论吧 !
