

无人机的导航技术分析
军用/航空电子
描述
但凡出行,都离不开导航,无人机飞行也一样。导航的方法和手段有许多,最传统的是航图导航,最流行的是卫星导航,最具独立性的是惯性导航;无人机上用到的是卫星导航和惯性导航。说到底,导航就是三个问题:我在哪?我去哪?怎么走?关键就是两个字:定位。定位的问题解决了,我在哪、我去哪以及怎么走的问题也都迎刃而解了。
一、卫星导航
航图导航(航图,是航空地图的简称)的航路点是由飞行员依据航图和地标确定的,如果航路点可以由卫星导航系统给出,这就产生了卫星导航。
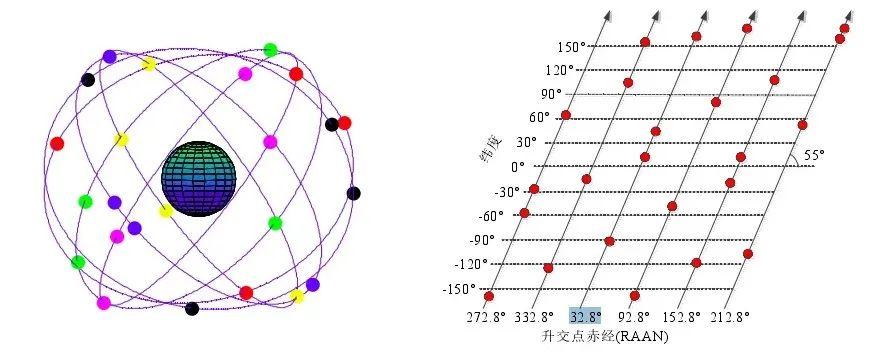 美国GPS星座示意图
美国GPS星座示意图
以美国全球定位系统(GPS)为例,系统采用24颗卫星,离地高度2万200千米,12小时环绕地球一圈,保证在任意时刻,在地面上的任意一点都可以同时观测到4颗以上的卫星。系统采用三星定位原理。任一时刻卫星的位置都是已知的,任一颗卫星到接收机的距离可以通过信号往返时间求得,由此便可以通过三星定位确定接收机的空间位置。考虑到卫星时钟与接收机时钟之间的误差,引入第四颗卫星用于消除误差,从而求得任一时刻接收机的实时位置。已知接收机的位置(航路起点),如果再明确了航路终点,便可以依据数字地图进行航路规划,确定航路转弯点、检查点等,进而在此基础上,依据航迹、航线等完成卫星导航。
二、惯性导航
卫星导航依赖于卫星信号,接收机容易受到外部干扰,从而影响系统的稳定工作。在这一点上,具有自主导航能力的惯性导航系统就显示出了独特优势。
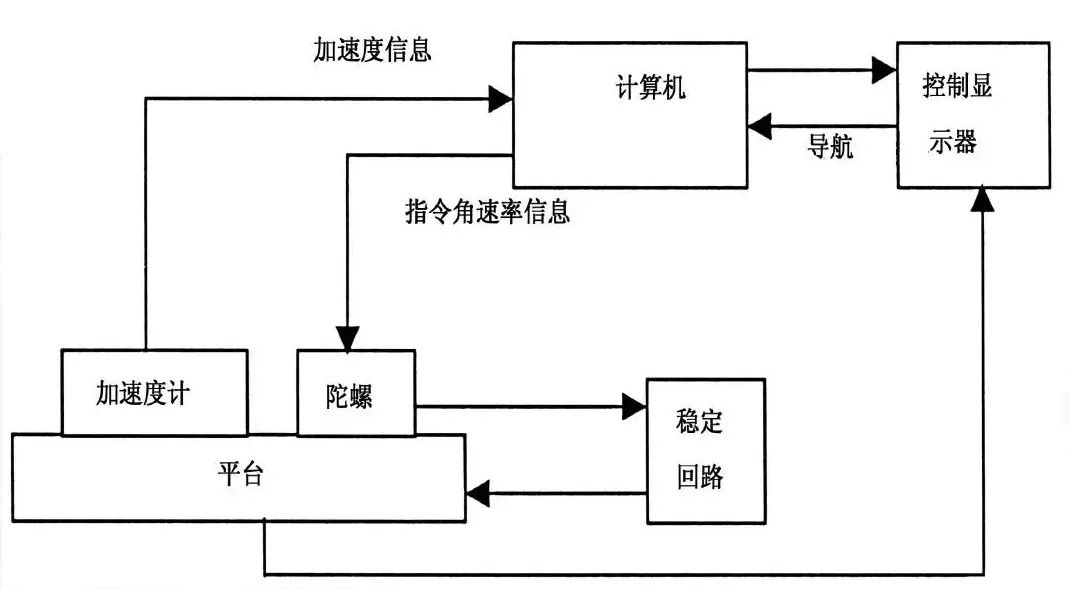 惯导系统基本组成
惯导系统基本组成
惯性导航系统主要由陀螺稳定平台、导航计算机和显示控制装置等组成。
 陀螺稳定平台,包括三轴陀螺、加速度计、稳定回路等
陀螺稳定平台,包括三轴陀螺、加速度计、稳定回路等
在无人机的惯导系统(INS=Inertial Navigation System)中,通常会使用三轴加速度计和三轴陀螺仪作为IMU的主要传感器。加速度计用于测量飞行器的加速度,并通过积分计算速度和位置。陀螺仪则用于测量飞行器的角速度,并通过积分计算姿态。
三、惯性导航的基本原理和步骤
以下是惯性导航的基本原理和步骤:
初始化:在开始飞行之前,需要对惯导系统进行初始化。这包括校准传感器、获取初始位置和姿态,并设置初始速度为零。
传感器测量:在飞行过程中,加速度计和陀螺仪持续地测量飞行器的加速度和角速度。这些测量值通常以每个轴的三个分量表示。
加速度计数据处理:通过对加速度计数据进行积分,可以计算出飞行器的速度和位置。积分过程中,可能会引入累积误差,因此通常需要使用陀螺仪数据进行校正或采用更复杂的误差补偿算法。
陀螺仪数据处理:陀螺仪测量的角速度用于计算飞行器的姿态。通过对角速度进行积分,可以得到姿态随时间的变化。同样,由于积分误差的累积,可能需要进行误差补偿或校正。
姿态更新:使用陀螺仪数据得到的姿态信息可以与其他传感器(如 GPS、罗盘)提供的姿态信息进行融合,以优化姿态估计的精度和稳定性。常用的融合算法包括卡尔曼滤波器和互补滤波器。
导航解算:通过综合加速度计、陀螺仪和其他传感器提供的姿态、速度和位置信息,可以进行导航解算,得到飞行器的当前位置和速度。
惯导系统有两大独特优势:一是可以不依赖于外界信息和地面辅助设备等独立工作,自主性好,抗干扰性强;二是惯导系统可以和飞行控制系统、动力控制系统和火力控制系统交联,实现飞/推/火一体控制,提高飞行控制效能和飞机综合作战效能。因此,惯导系统是军机导航系统的必备选择。惯导系统的最大问题在于陀螺仪存在漂移误差,不适于独立地长时间用于远程导航,实际采用的大都是以惯性导航为主体的两种或两种以上导航手段的组合导航。 早期的飞行器使用机械惯导系统,其中最重要的就是陀螺仪。现在的MEMS陀螺仪输出的是角速度,而机械陀螺仪则可以直接给出角度信息。陀螺仪原理可以参考mit这节经典力学课程: MEMS陀螺仪工作原理,可以参考ADI这个视频:
不管是用哪种方式,最终是要得到3个角度:航向角、横滚角、俯仰角。有了这3个角度,便知道了飞行姿态,进而对姿态进行控制和调整。
审核编辑:黄飞
-
无人机技术路线2026-07-10 489
-
第一集 知语科技无人机反制技术与应用--无人机的定义与分类2024-03-12 4748
-
无人机导航技术及其特点解析2023-06-16 6118
-
超声波传感可用于无人机应用的原因2022-11-11 980
-
反无人机技术的研发,无人机反制设备成为热门产品2022-09-08 28993
-
各类反无人机技术的优势2022-08-25 28027
-
无人机反制市场分析2022-08-23 6979
-
无人机探测技术2020-07-29 2982
-
无人机类型之植保无人机,带你了解什么是植保无人机?2019-06-28 3865
-
无人机技术解答2017-11-15 29123
-
无人机遥感技术2016-03-11 8243
全部0条评论

快来发表一下你的评论吧 !
