

模拟技术入门之零极点分析(1)
模拟技术
描述
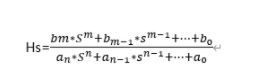
1、线性时不变系统的传递函数:
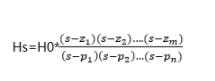
因式分解可得:
2、系统的零极点的物理含义:
零点:当系统输入幅度不为零且输入频率使系统输出为零时,此输入频率值即为零点;
极点:当系统输入幅度不为零且输入频率使系统输出为无穷大时,此频率值即为极点。
则z1,z2…zm为传递函数的零点;
p1,p2…pn为传递函数的极点。
3、 零极点对传递函数幅值和相位的影响(此篇暂时只分析了实数零极点):
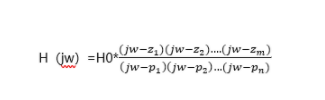
20logH(jw)=20log(H0)+20log(jw-z1)+20log(jw-z1)…+20log(jw-zm)-20log(jw-p1)-20log(jw-p2)-…-20log(jw-pn)
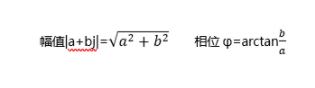
虚数的幅值和相位定义:
则对于极点Px:
将Px化为常系数:jw-Px= Px(j*w/Px-1)
只考虑虚数部分 -20log|H(jw)|= -20lg| j*w/Px-1|=-20lg√1+w^2/Px^2
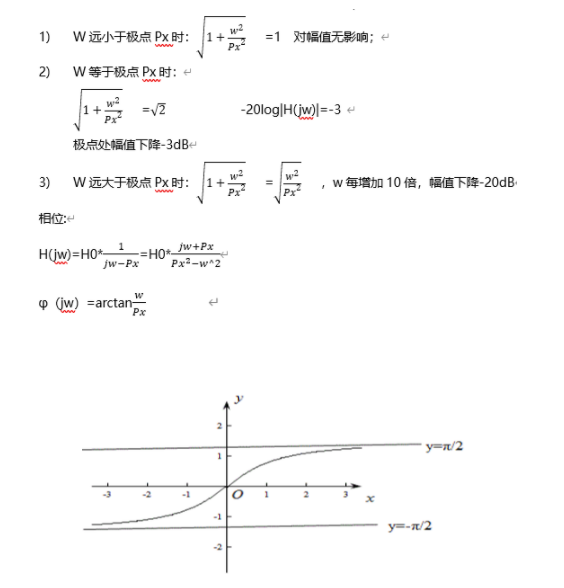
Ø W远小于Px时,w/Px→0 φ(jw)→0
Ø W等于Px时,w/Px=1 φ(jw)=45°
Ø W远大于Px时,w/Px→1 φ(jw)=90° (一般认为>10倍极点频率相位变化90°)
Ø Px为正时(右半平面极点),相位为正;Px为负(左半平面极点)时,相位为负。
所以对于左半平面极点:增益以-20dB/十倍频率下降;
相位减少90°(>10倍极点频率)
对于右半平面极点:增益以-20dB/十倍频率下降;
相位增加90°(>10倍极点频率)
对于零点Zx:
所以对于左半平面零点:增益以+20dB/十倍频率上升;
相位增加90°(>10倍极点频率)
对于右半平面零点:增益以+20dB/十倍频率下降;
相位减少加90°(>10倍极点频率)
审核编辑:黄飞
-
零极点仿真分析简介2025-05-28 1545
-
零极点怎么判断滤波器类型2024-08-21 6979
-
什么是零极点电路 零极点仿真原理2024-03-07 4654
-
模拟技术入门之零极点分析(2)2023-11-29 1565
-
零点和极点的作用 复变函数的极点和零点有什么区别和联系?2023-11-08 12056
-
模拟CMOS集成电路设计:零极点对消2023-10-18 6192
-
关于dcdc的零点和极点的理解是什么2023-07-28 8707
-
零极点分析的基本原理、应用和意义2023-06-20 11591
-
电路中的零极点如何能直接看出来呢?2023-02-16 11881
-
简要分析S域分析、极点与零点2021-06-23 3037
-
什么是极点?什么是零点?2021-04-06 8890
-
请问什么是零极点?2019-03-13 6435
-
模拟电路之单极点电路 极点对不同频率小信号的反应2018-02-21 3841
全部0条评论

快来发表一下你的评论吧 !
