

 CAN转PROFINET网关在港机控制系统的应用
CAN转PROFINET网关在港机控制系统的应用
电子说
描述
关键词:CAN 转PROFINET 网关PROFINET CAN 总线 稳联技术 港机控制
实现这两种不同的现场总线之间的数据通信。
一、系统组成
1、系统结构
在整个控制系统中,各个调速装置与 PLC、主 PLC 和司机室远程 PLC 之间、以及 PLC 与可显示工作状 态和故障情况的大屏幕监控系统之间采用 PROFINET 通讯连接。
在图 1 的系统构成中,略去了西门子 S7-400PLC 之外的其它现场级控制设备。西门子 S7-400PLC 的主要任务之一是实现对桥吊控制器的控制。
西门子 S7-400PLC 采用PROFINET 主站协议;
桥吊控制器采用的是汽车行业普遍使用的 CAN 总线技术, 控制现场集装箱的动作。在该项目中,为了实现西门子 S7-400PLC 对桥吊控制器的控制,采用了稳联技术的高性能的 CAN 转PROFINET 网关WL-ABC3333:
WL-ABC3333 做西门子 PLC 的PROFINET 从站。用户通过在网关配置软件设置网关输入输出字节数、CAN 通讯方式及波特率,并且在西门子 PLC 的组态软件中进行组态,即可实现不同总线数据的双向传输。
2、通信网络组成
2.1 PROFINET 协议简介
PROFINET 是目前国际上通用的现场总线标准之一,以其独特的技术特点、严格的认证 规范、开放的 标准、众多厂商的支持和不断发展的应用行规,已成为很重要的和应用很广泛的 现场总线标准。
•PROFINET:主站和从站之间采用以太网的通讯方式,主要应用于自动化系统中单元级和现场级通信。
• 支持 CANopen 协议的最多 8 个字节的 TPDO、最多 8 个字节的 RPDO、最多 4 个字节快速 Download SDO 和最多 4 个字节快速 Upload SDO。
其中,PROFINET是高速网络,通讯速率达到 100M。PROFINET 可以连接远程 I/O、执 行机构、 智能马达控制器、人机界面 HMI、阀门定位器、变频器等智能设备, 一条PROFINET 总线可以最多连接多个从站设备
2.2 CAN 协议简介
CAN 全称为 Controller Area Network,即控制器局域网,由德国 Bosch 公司先提出,是国际上应用 很广泛的现场总线之一。起初 CAN 被设计作为汽车环境中的通讯,在汽车电子控制装置之间交换信息形成 汽车电子控制网络。
由于其良好的性能、较高的可靠性和低廉的价格现已广泛应用于工业现场控制、医疗 仪器等众多领域。
CAN 协议是建立在 OSI7 层开放互连参考模型基础之上的。但 CAN 协议只定义了模型的最下面两层:数 据链路层和物理层,仅保证了节点间无差错的数据传输。CAN 的应用层协议必须由 CAN 用户自行定义,
或 采用一些国际组织制订的标准协议。应用较为广泛的是 DeviceNet 和 CANopen,分别广泛应用于过程控制 和机电控制领域。但此类协议一般结构比较复杂,更适合复杂大型系统的应用。
CAN 是一种多主方式的串行通讯总线,基本设计规范要求有高的位速率、抗电磁干扰性,而且要能够 检测出总线的任何错误。当信号传输距离达 10km 时,CAN 仍可提供高达 50kbps 的数据传输速率。
CAN 协议支持两种帧格式,它们只是在确认区存在差异,一种被称为 CAN 标准帧,在 CAN2.0 协议的 Part A 进行定义,标准帧支持 11bit 的确认区长度;另一种称为 CAN 扩展帧,在 CAN2.0 协议的 Part B 进 行定义,支持 29bit 的确认区。
二、CAN 转PROFINET 网关WL-ABC3333 的配置
稳联技术WL-ABC3333 网关支持 CAN 接口的设备(包括 CAN2.0A 和 CAN2.0B)连接到PROFINET 总线, 级将 CAN 总线网络设备转换为PROFINET 总线网络设备,WL-ABC3333 在PROFINET 接口为从站。
用户可 通过配置软件设置网关 CAN 通讯方式、波特率等,在西门子 博图 中加载网关WL-ABC3333 的 GSD 文件,即可在该编程软件中对该网关进行输入输出字节数选择和映射设置,完成相应的通讯功能。 请见如下详细的硬件和软件组态方法:
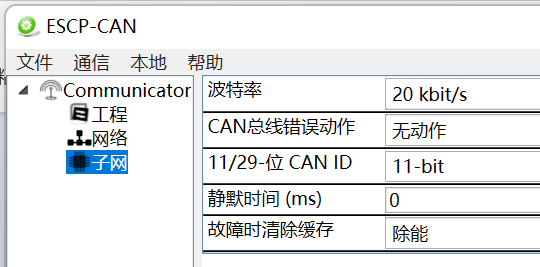
1、CAN 转PROFINET 网关WL-ABC3333 的硬件配置WL-ABC3333 的PROFINET 从站地址可以通过网关的配置按钮来设置。WL-ABC3333 提供 8 位拨码开关,可 分别设置输入输出字节数(16 字节、15 字节可选)、
CAN 工作方式(CAN2.0A、CAN2.0B 可选)以及 CAN 波特率(10K~1Mbps 可选)。如下图所示:
WL-ABC3333 自带两个PROFINET 网口。用户可使用标准PROFINET 连接头和标准的PROFINET 电缆将其连接至PROFINET网络中。
WL-ABC3333 提供 1 路 CAN 接口,支持 CAN2.0A./CAN2.0B 协议。
2、在 博图 组态配置 CAN 转PROFINET 网关WL-ABC3333
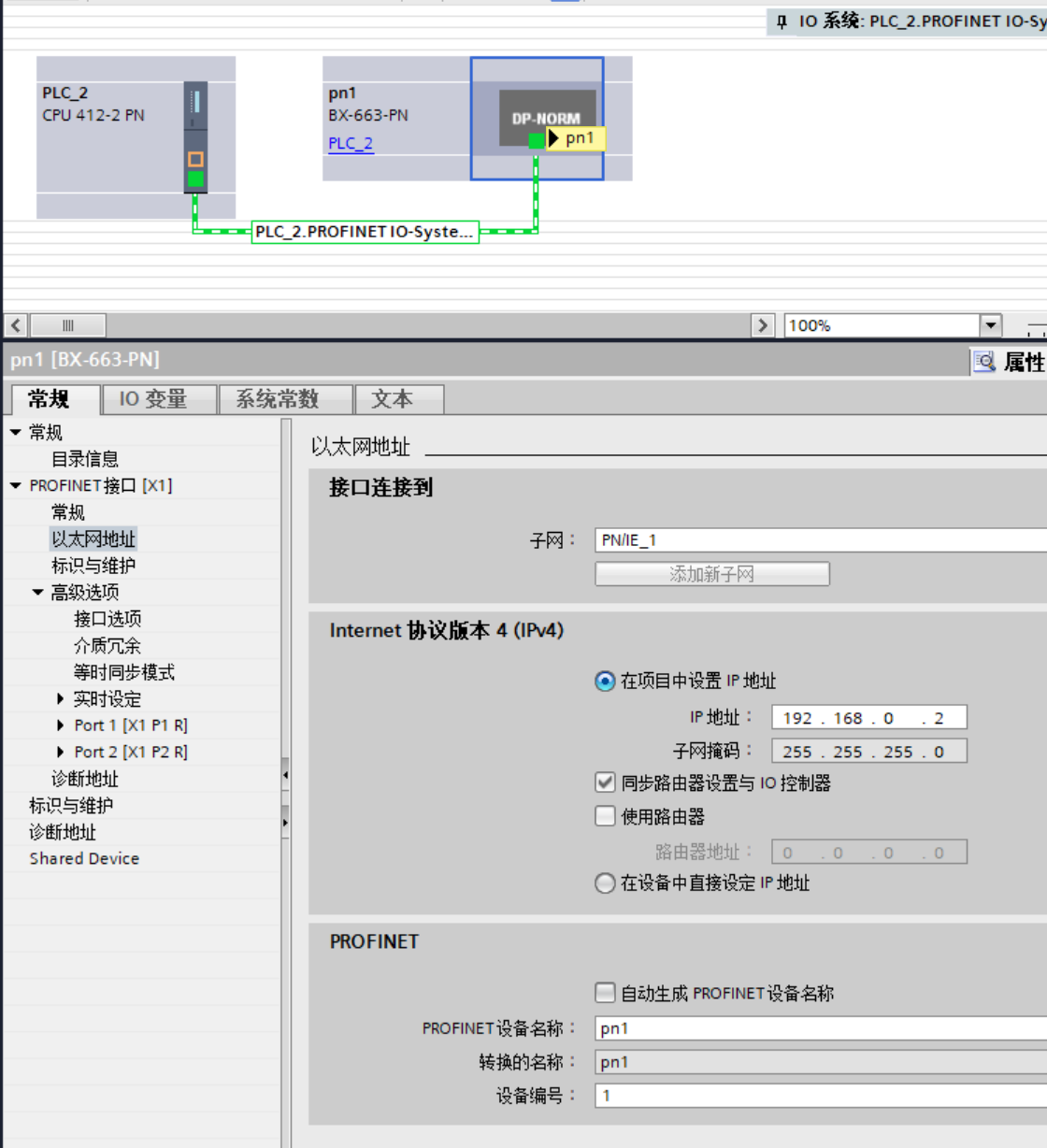
在博图的硬件组态界面,导入WL-ABC3333 对应的 GSD 文件,把WL-ABC3333 的配置文件添加到 博图 的设备配置库中。用户可以在硬件组态界面找到注册的设备,
网关支持的输入输出数据块
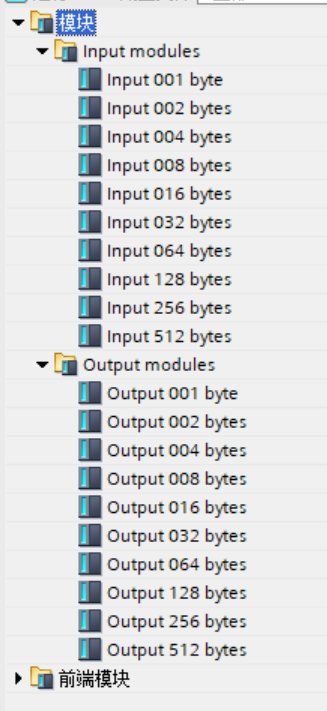
注意:在 博图 中选择的PROFINET 输入、输出字节数不需与网关状态一致。 拖动需要的输入和输出数据块到网关对应的槽位。如下图所示,将数据块“128 bytes Input & Output” 拖动到组态的槽位中,此时,对应的映射区起始地址分别为 512,PLC 对相应的数据进行寻址访问。

PLC 将计算得出的控制命令值,通过WL-ABC3333 发送到桥吊控制器,桥吊控制器根据收到的命令产生相 应的动作指令来控制桥吊。
审核编辑:汤梓红
-
Profinet转CAN网关借助特定配置软件完成子站配置任务2025-06-09 729
-
改造神器,profinet转CAN协议网关在三高炉的场景应用分享2025-06-03 747
-
Modbus转Profinet网关:工控机的“逆袭神器”2025-05-20 2656
-
广成科技Profinet转CAN网关的应用案例2025-04-22 1125
-
智慧物流的神器Profinet转CAN网关2024-12-27 1293
-
RS485Modbus转Profinet网关在工业现场的应用优势2024-01-24 1015
-
通过Profinet转EtherCAT网关将伺服驱动与Profinet通讯2024-01-16 1647
-
can转profinet网关实现汽车生产的革新2023-12-25 1048
-
Modbus转Profinet网关在金银精炼控制系统中应用案例2023-11-21 1010
-
Modbus转Profinet网关在立体仓储系统里的应用2023-11-09 1051
-
ModbusTCP转Profinet主站网关在博图配置案例2023-10-27 2416
-
捷米CAN转PROFINET协议网关连接伺服从站配置案例2022-12-29 10411
-
Modbus485转Profinet网关应用于轧钢公司的PLC控制系统2022-08-30 38922
-
Modbus转profinet网关在天津燃油公司的应用案例2018-03-16 825
全部0条评论

快来发表一下你的评论吧 !
