

 基于STM32CUBEMX驱动TOF模块VL6180与VL6180X(2)----修改测量范围
基于STM32CUBEMX驱动TOF模块VL6180与VL6180X(2)----修改测量范围
描述
概述
当使用VL6180传感器进行测距时,可以通过修改缩放因子来改变可测量的距离范围。VL6180是一种基于飞行时间原理的传感器,通过测量光信号的往返时间来确定物体与传感器之间的距离。
最近在弄ST和瑞萨RA的课程,需要样片的可以加群申请:615061293 。
默认情况下,VL6180传感器的测距范围约为0至200毫米。然而,通过调整缩放因子,您可以扩展或缩小该范围,以适应不同的应用需求。
缩放因子是一个乘法因子,用于调整传感器的测量范围。较小的缩放因子可以扩展测距范围,使传感器能够测量更远的距离,而较大的缩放因子可以缩小测距范围,使传感器适用于更近的测量。
要修改缩放因子,需要使用VL6180传感器的控制接口与其进行通信。通过发送适当的命令和参数,您可以设置所需的缩放因子值。具体的命令和参数取决于您使用的特定控制接口和驱动程序。
下面温度可以得知,主要有3种缩放,测量距离分别到20cm、40cm、60cm。

视频教程
https://www.bilibili.com/video/BV1Mj411S7p3/
样品申请
https://www.wjx.top/vm/OhcKxJk.aspx#
完整代码下载
[https://download.csdn.net/download/qq_24312945/87945856
修改缩放因子
在ST提供的en.STSW-IMG003.zip压缩包中,可以找到一个名为CodeSamples_UM.pdf的文档。在该文档中,有一个案例展示了如何修改缩放方式。通过调用函数VL6180x_UpscaleSetScaling(myDev, 2),您可以将缩放因子设置为2,实现将测量范围扩大两倍的效果。这个案例为您提供了一个具体的示例,可以帮助您了解如何在编程中使用该函数来修改缩放因子。

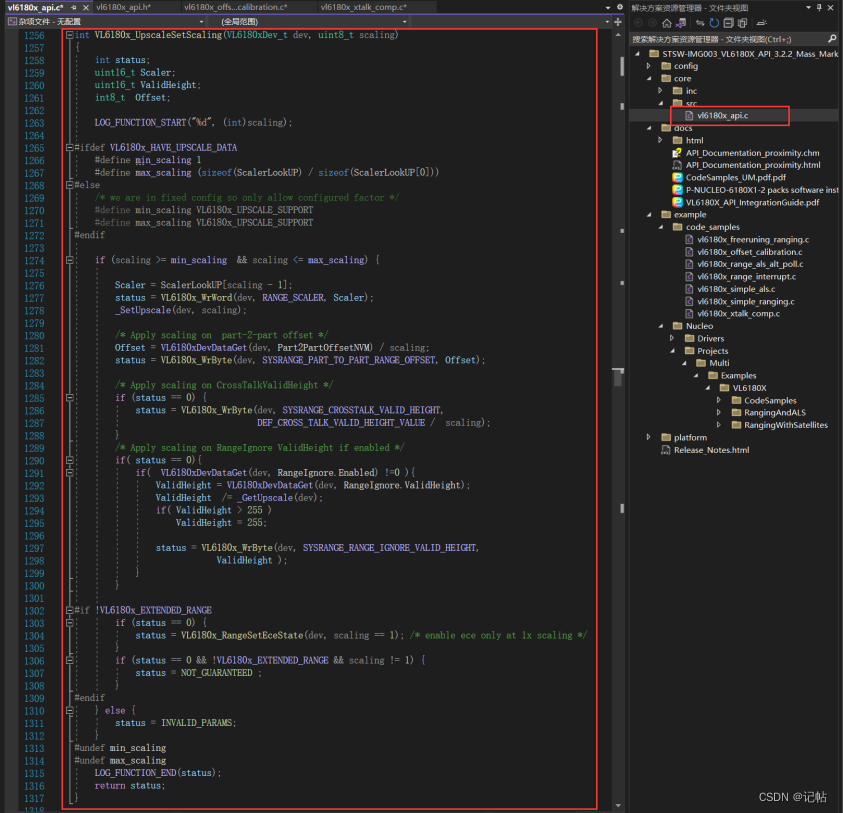
VL6180x_UpscaleSetScaling
在ST提供的en.STSW-IMG003.zip压缩包中,vl6180x_api.c文件包含了VL6180x_UpscaleSetScaling函数,这个函数是用来设置设备的测距缩放因子的。
当设备进行测量时,测距缩放因子会应用于设备测得的原始距离,以扩大测量范围,但会牺牲一定的精度。
需要注意的是,在设备处于固件待机状态(自由运行)以外的状态下修改缩放因子是不安全的。这可能导致误报中断、测距范围错误等问题。
为了简化和优化原始函数,并提供更清晰和易于理解的代码结构。去除不相关的部分,由于原始函数中的某些操作在新的函数中没有被使用到,这些部分被去除以提高代码的清晰度和可读性。
修改后的代码具有更简洁、易读和易于维护的结构,同时仍然保留了修改缩放因子所需的核心操作。这种修改的目的是使代码更易于理解和实现,并提供更好的可扩展性和可重用性。
修改为所需要的函数,如下所示:
uint8_t scaling;
// RANGE_SCALER values for 1x, 2x, 3x scaling - see STSW-IMG003 core/src/vl6180x_api.c (ScalerLookUP[])
static uint16_t const ScalerValues[] = {0, 253, 127, 84};
void VL6180x_UpscaleSetScaling(uint8_t add,uint8_t new_scaling)
{
uint8_t const DefaultCrosstalkValidHeight = 20; // default value of SYSRANGE__CROSSTALK_VALID_HEIGHT
// do nothing if scaling value is invalid
if (new_scaling < 1 || new_scaling > 3)
{ return; }
scaling = new_scaling;
VL6180X_WriteByte_16Bit(add,RANGE_SCALER,ScalerValues[scaling]);
// apply scaling on part-to-part offset
VL6180X_WriteByte(add,SYSRANGE__PART_TO_PART_RANGE_OFFSET,ptp_offset / scaling);
// apply scaling on CrossTalkValidHeight
// writeReg(VL6180X::SYSRANGE__CROSSTALK_VALID_HEIGHT, DefaultCrosstalkValidHeight / scaling);
VL6180X_WriteByte(add,SYSRANGE__CROSSTALK_VALID_HEIGHT, DefaultCrosstalkValidHeight / scaling);
// This function does not apply scaling to RANGE_IGNORE_VALID_HEIGHT.
// enable early convergence estimate only at 1x scaling
// uint8_t rce = readReg(VL6180X::SYSRANGE__RANGE_CHECK_ENABLES);
// writeReg(VL6180X::SYSRANGE__RANGE_CHECK_ENABLES, (rce & 0xFE) | (scaling == 1));
uint8_t rce=VL6180X_ReadByte(add,SYSRANGE__RANGE_CHECK_ENABLES);
VL6180X_WriteByte(add,SYSRANGE__CROSSTALK_VALID_HEIGHT, DefaultCrosstalkValidHeight / scaling);
}
主函数
修改后的函数如下所示,修改缩放因子为x2。
/* USER CODE BEGIN 2 */
printf("111");
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_1, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_2, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_9, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_13, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_14, GPIO_PIN_RESET);
//VL6180_4
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_5, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_SET);
HAL_Delay(1);
VL6180X_Init(VL6180X_DEFAULT_I2C_ADDR1);
VL6180x_UpscaleSetScaling(VL6180X_DEFAULT_I2C_ADDR1,2);//缩放x2
uint8_t id=VL6180X_Read_ID(VL6180X_DEFAULT_I2C_ADDR1);
printf("id=%d",id);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
VL6180_L1=VL6180X_Read_Range(VL6180X_DEFAULT_I2C_ADDR1);
printf("VL6180_L1=%dmmn",VL6180_L1*2);
HAL_Delay(1000);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
测试结果
测试距离为20cm结果如下所示。

审核编辑:汤梓红
- 相关推荐
- 热点推荐
- 传感器
- 测距
- TOF
- stm32cubemx
-
基于STM32CUBEMX驱动TOF模块VL6180与VL6180X(3)----修改设备地址2023-12-01 2114
-
基于STM32CUBEMX驱动TOF模块VL6180与VL6180X(1)----单模块距离获取的最佳实践2023-07-27 4186
-
使用VL6180X ToF传感器与Particle Argon控制伺服器2022-10-19 1199
-
Vl6180x 官方盖玻片模型的使用2019-12-31 2028
-
请问VL6180X的基本功能有哪些?2019-06-05 3418
-
近距离测量VL6180X错误2019-05-13 3022
-
VL6180X增加了范围2019-04-08 1942
-
VL6180X范围偏移怎么更改2018-10-23 2446
-
VL6180X:什么是线性误差率?2018-10-22 2689
-
VL6180X操作如何测量距离2018-10-10 7870
-
VL6180X包含多少个传感器?2018-09-25 2489
-
VL6180x单次测量范围测量后的系统错误代码2018-09-21 3423
全部0条评论

快来发表一下你的评论吧 !
