

 VL53L5CX驱动开发(1)----驱动TOF进行区域检测
VL53L5CX驱动开发(1)----驱动TOF进行区域检测
描述
概述
VL53L5CX是一款先进的飞行感应(FlightSense)产品系列的飞行时间(ToF)多区间测距传感器。封装在微型的可回流焊盘封装内,它集成了SPAD阵列、物理红外滤光片和衍射光学元件(DOE),以在不同的环境光照条件和各种覆盖玻璃材料下实现最佳测距性能。
最近在弄ST的课程,需要样片的可以加群申请:615061293 。
视频教学
[https://www.bilibili.com/video/BV1gC4y1Z7o8/](
样品申请
[https://www.wjx.top/vm/OhcKxJk.aspx#]
源码下载
[https://download.csdn.net/download/qq_24312945/88399191
主要特点
- 使用直接ToF技术进行绝对距离测量,不受目标颜色和反射率影响。
- 在快速的60赫兹速度下实现高达400厘米的准确测距,成为市场上最快的微型多区间ToF传感器。
- 允许在最多8x8区间内进行多区间距离测量,具有宽广的65°对角视场(FoV),可通过软件调整。
- 集成ST的直方图专利算法,可在FoV内检测不同的物体,并在60厘米之外提供对覆盖玻璃串扰的免疫性。
- 提供具有可编程中断阈值的自主低功耗模式,用于唤醒主机。
- 每个区域具有运动指示器,显示目标是否移动以及移动方向。
- 小巧、完全集成的模块,带有940纳米不可见光VCSEL发射器和集成模拟驱动器。
- 使用DOE在发射器和接收器上实现65°对角方形FoV。
- 接收单光子雪崩二极管(SPADs)阵列。
- 配备运行固件的低功耗微控制器。
- 尺寸:6.4 x 3.0 x 1.5毫米。
- 单一可回流焊盘封装组件,便于集成。
- 灵活的电源选项:单一3.3 V或2.8 V操作,或3.3 V或2.8 V AVDD与1.8 V IOVDD的组合。
- 与各种覆盖玻璃材料兼容。
总的来说,VL53L5CX提供了快速、准确和多区间测距的功能,适用于自主系统、机器人和智能家居设备等应用。其先进的特性、紧凑的设计和对各种覆盖玻璃材料的兼容性有助于轻松集成到各种电子设备中。

硬件准备
首先需要准备一个开发板,这里我准备的是自己绘制的开发板,需要的可以进行申请。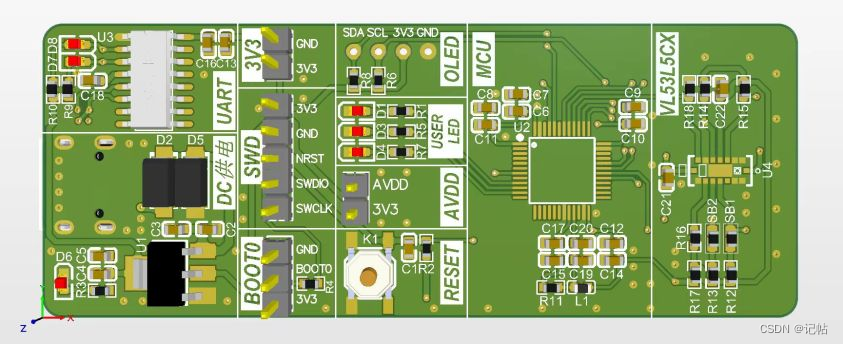
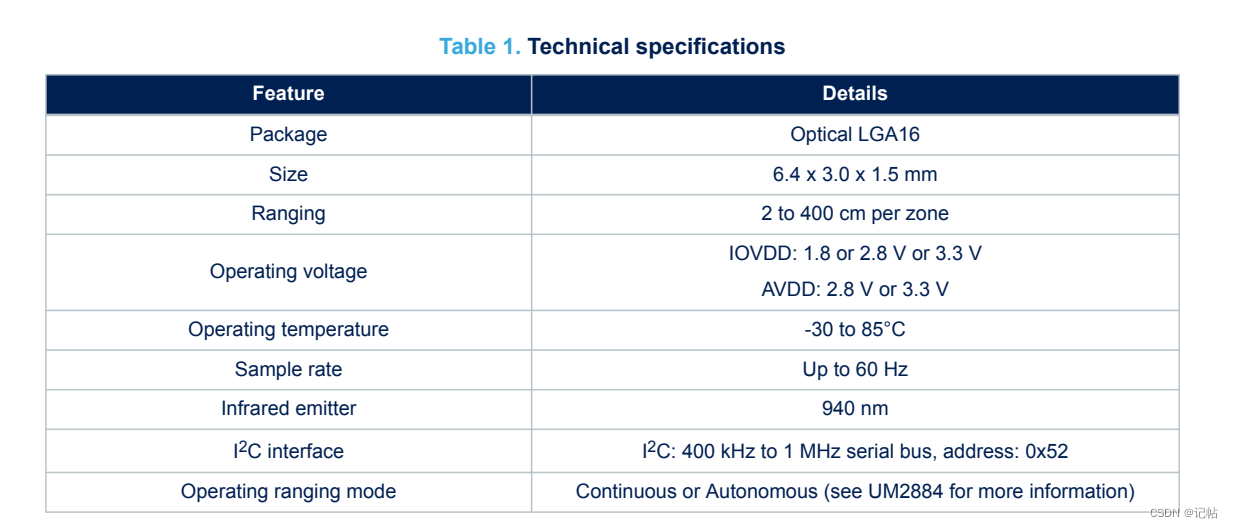
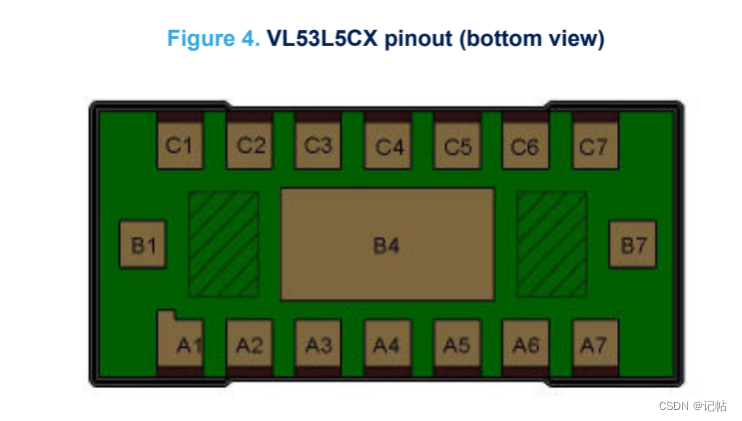
技术规格
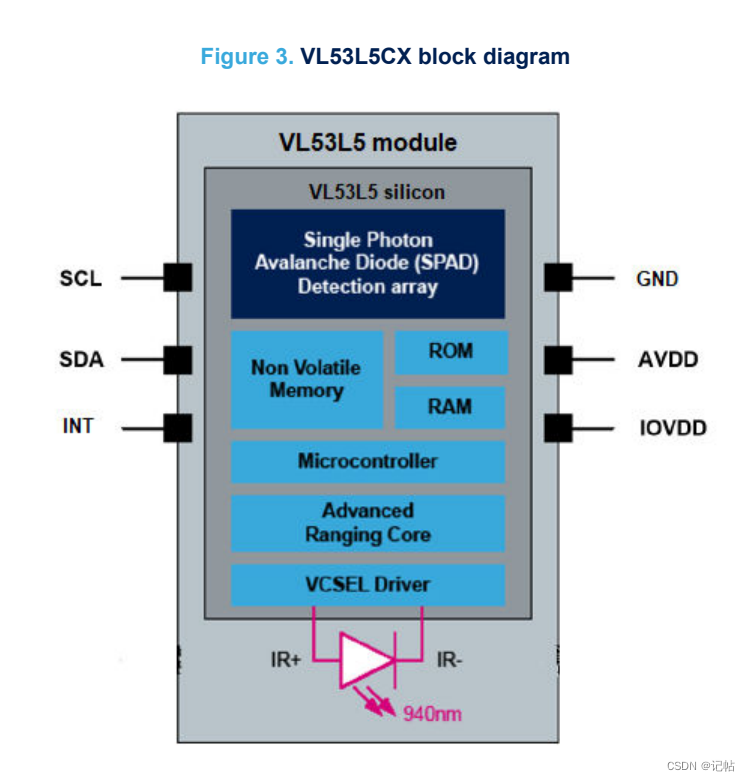
系统框图
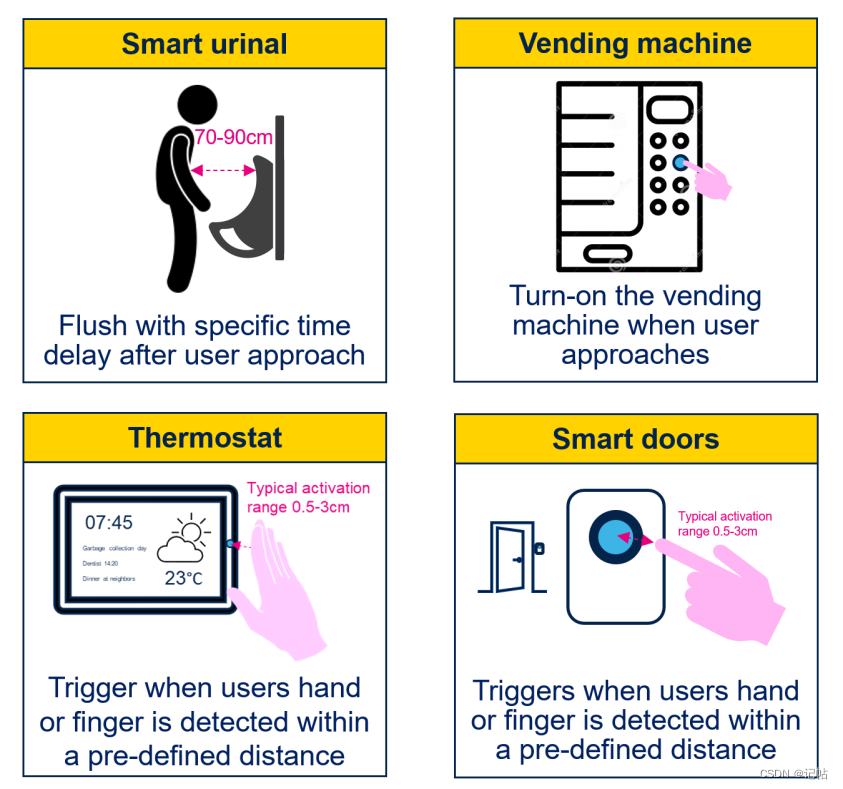
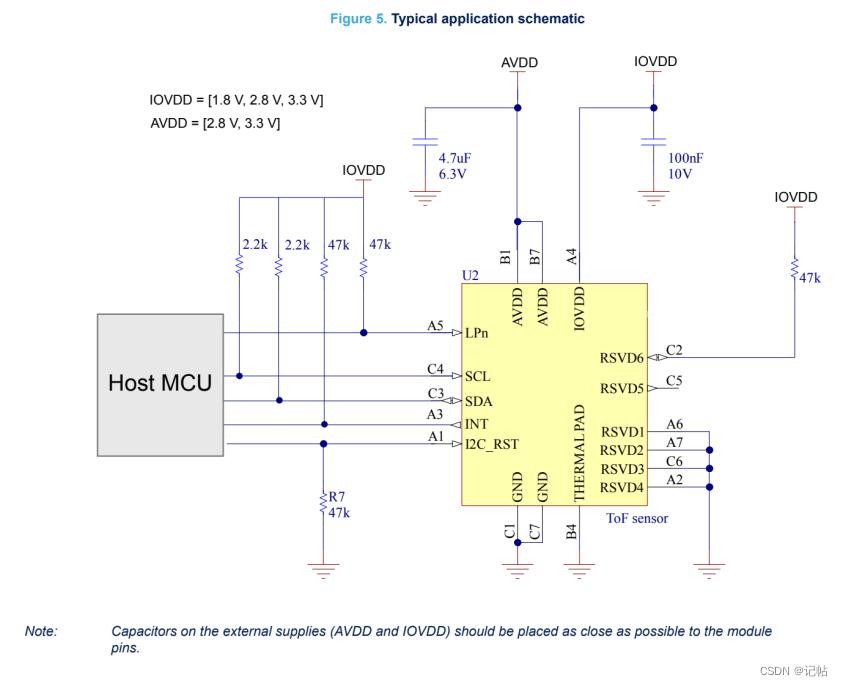
应用示意图
区域映射
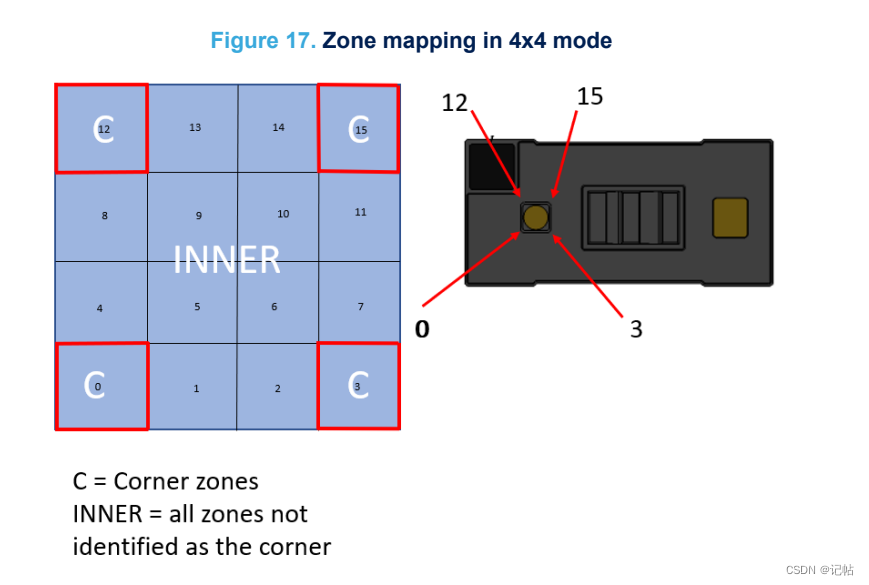
VL53L5CX支持4x4模式的区域映射和8x8模式的区域映射。
下图显示了4x4模式下的区域定义。总共有16个区域,它们沿着一行递增,然后再开始新的一行。物理视图是从设备顶部朝向镜头。如下图所示,每个区域的编号对应于传感器返回的ZoneIDs。
下图显示了8x8模式下的区域定义。总共有64个区域,它们沿着一行递增,然后再开始新的一行。物理视图是从设备顶部朝向镜头。如下图所示,每个区域的编号对应于传感器返回给主机的ZoneIDs。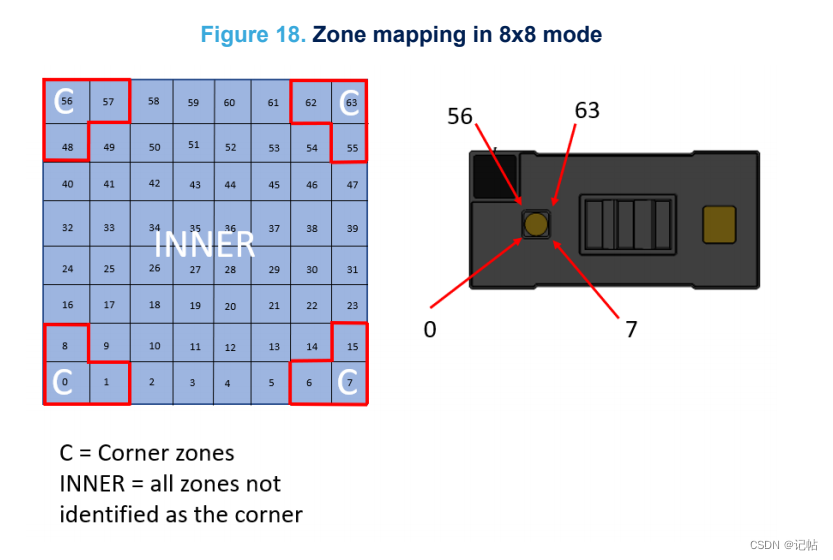
生成STM32CUBEMX
选择MCU
测试版所用的MCU为STM32G431CB。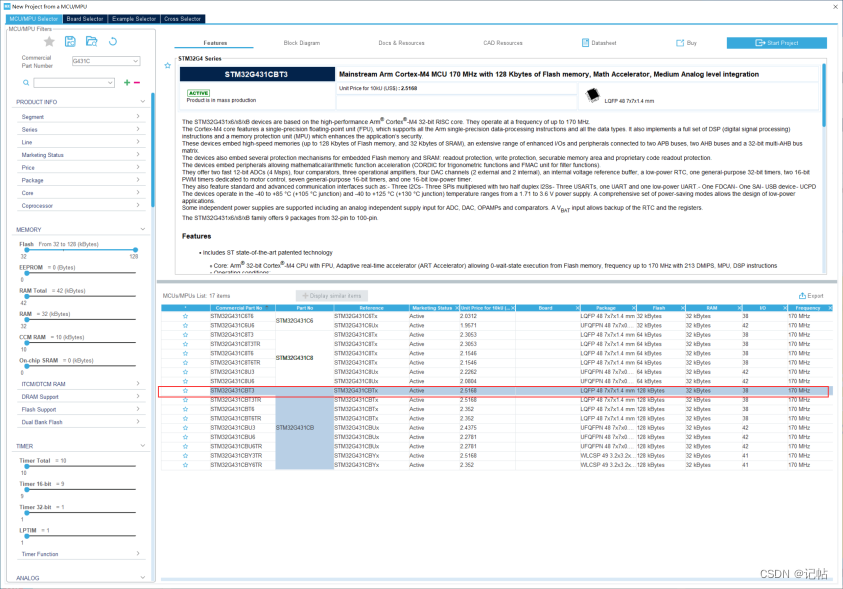
串口配置
查看原理图,PA9和PA10设置为开发板的串口。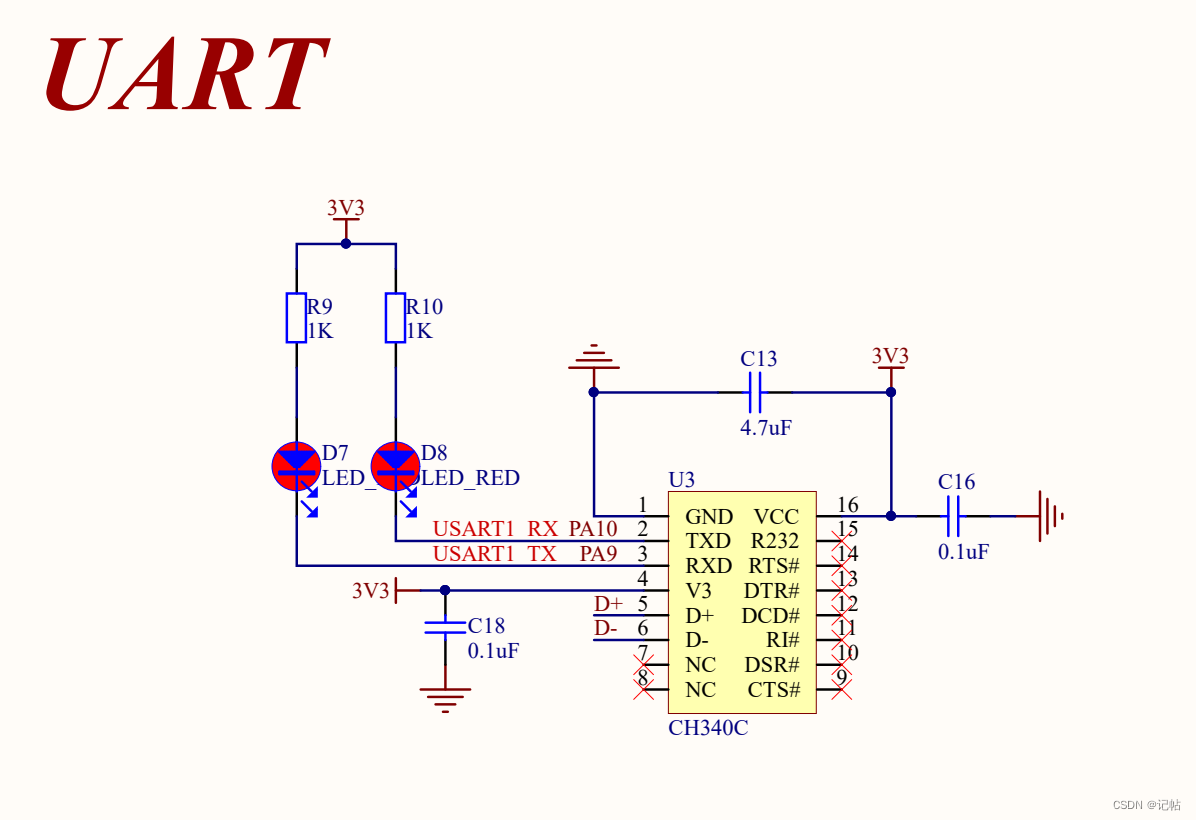
配置串口。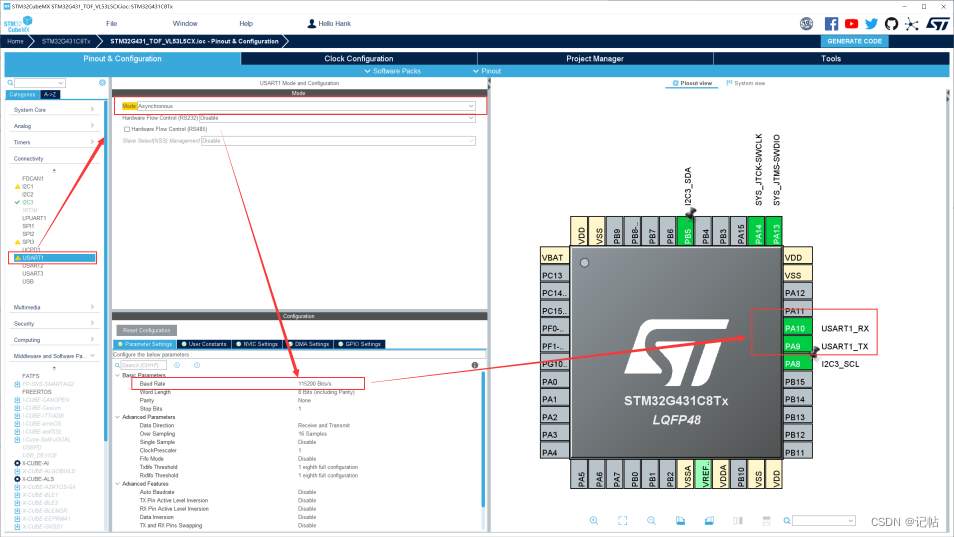
IIC配置
在这个应用中,VL53L5CX模块通过I2C(IIC)接口与主控器通信。具体来说,VL53L5CX模块的I2C引脚连接到主控器的PA8和PB5两个IO口。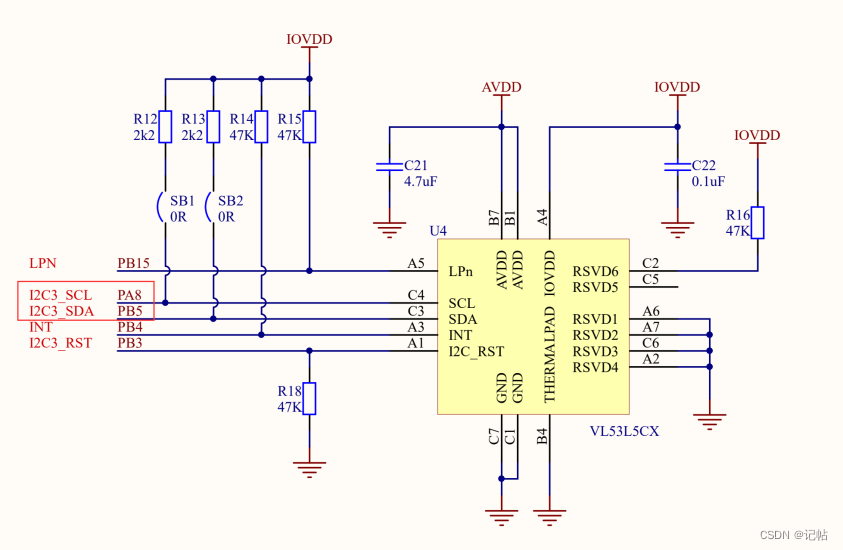
配置IIC为快速模式,速度为400k。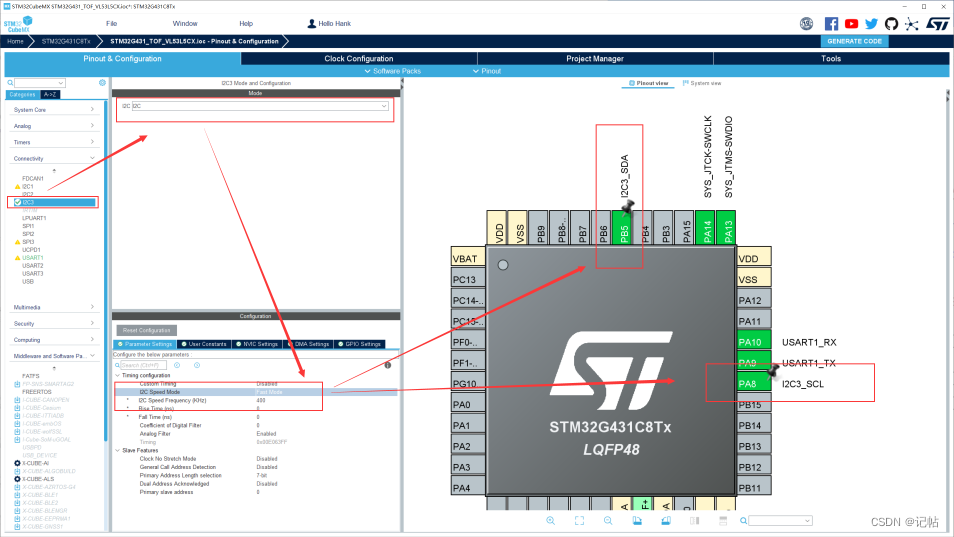
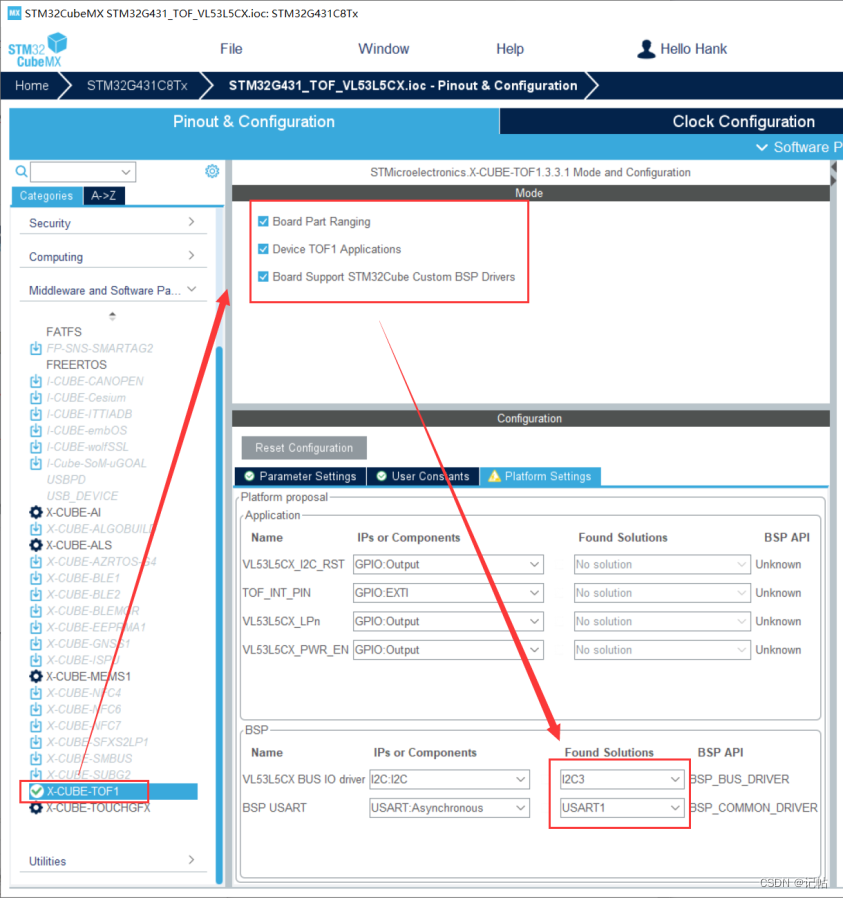
X-CUBE-TOF1
本节介绍在不需要使用样例应用时如何使用STM32CubeMX将X-CUBE-TOF1软件包添加到项目中。有了这样的设置,就只配置了驱动层。
串口重定向
打开魔术棒,勾选MicroLIB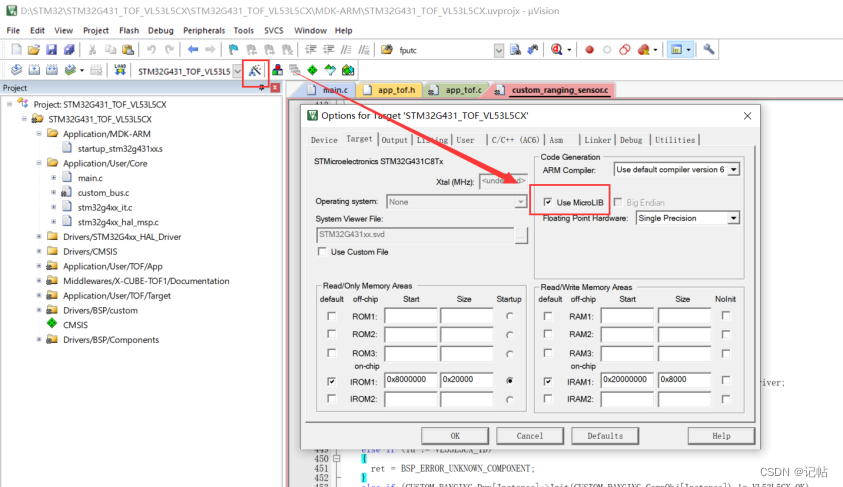
在main.c中,添加头文件,若不添加会出现 identifier "FILE" is undefined报错。
/* USER CODE BEGIN Includes */
#include "stdio.h"
/* USER CODE END Includes */
代码配置
在custom_ranging_sensor.c代码中,有IO口驱动VL53L5CX进行复位的代码,由于没有配置对应的IO,所以需要注释掉。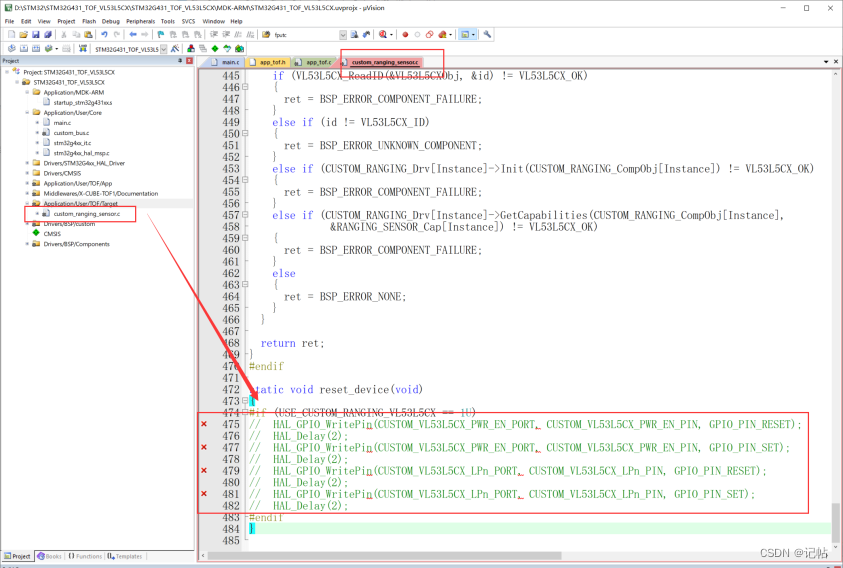
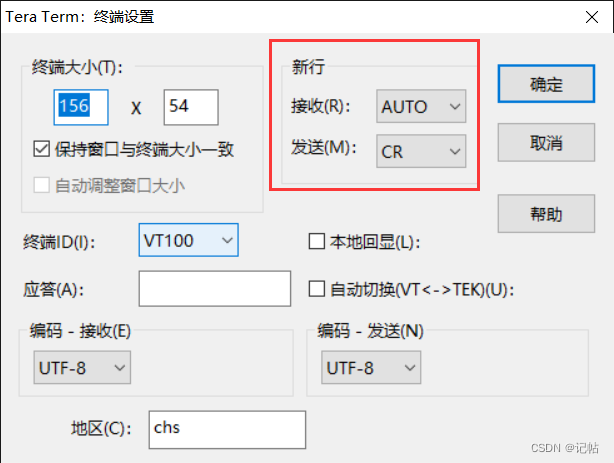
Tera Term配置
打开Tera Term并使用以下设置进行配置。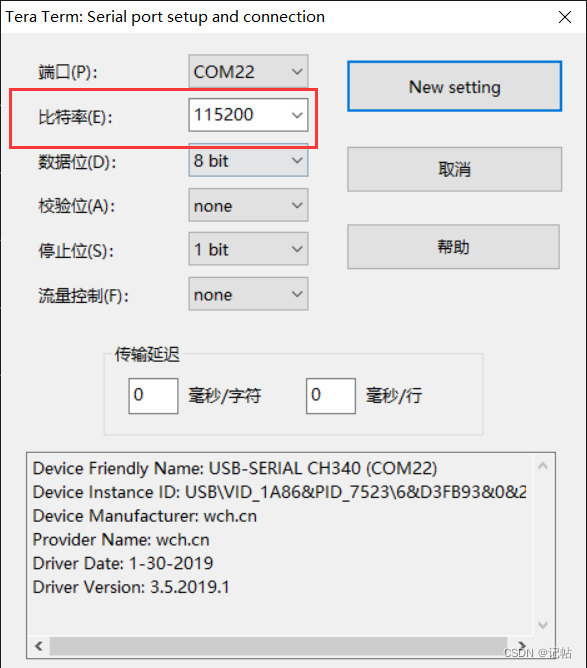
演示结果
配置完成侯可以在Tera Term下查看结果,如下是4*4的显示。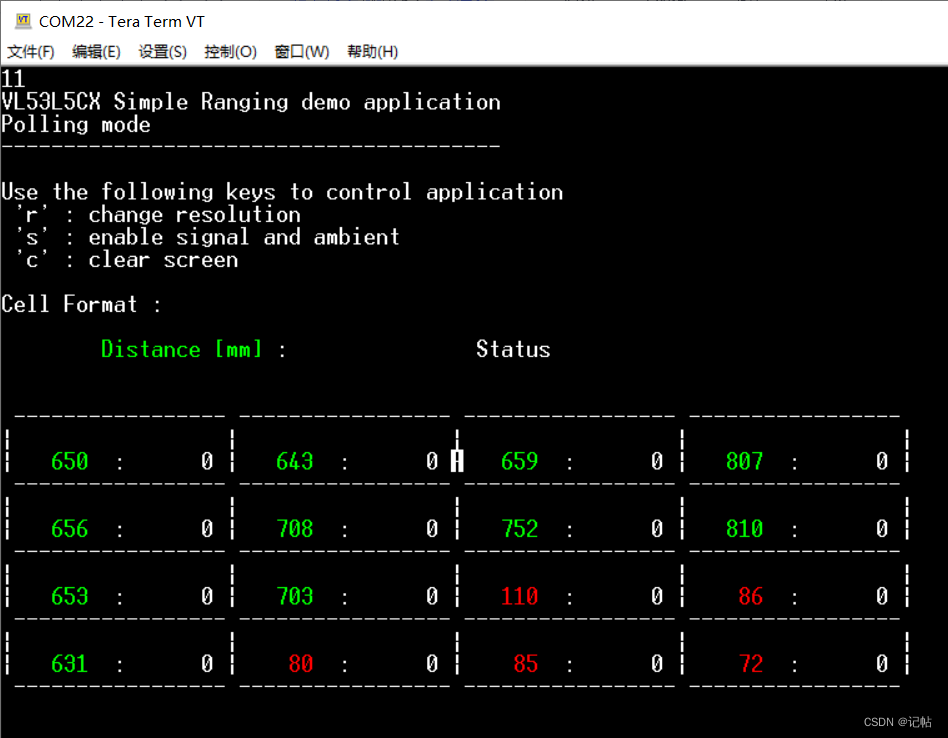
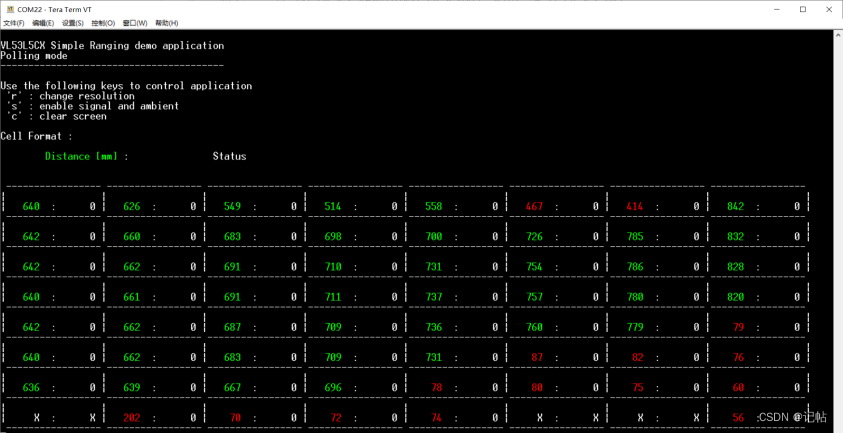
可以切换到8*8显示。
审核编辑 黄宇
-
VL53L8CX小板开发(1)----驱动TOF进行区域检测2025-12-22 1728
-
关于VL53L5CX的几个疑问求解2024-05-27 680
-
VL53L8CX TOF开发(1)----驱动TOF进行区域检测2024-05-20 2884
-
VL53L5CX驱动开发(3)----检测阈值2023-12-01 2312
-
VL53L5CX-SATEL和Rpi Linux驱动程序构建失败的原因?怎么解决?2022-12-26 573
-
VL53L5CX带盖窗大气隙垫片要求是什么?2022-12-13 580
-
求助,X-CUBE-TOF1中VL53L5CX传感器的API与VL53L5CX的ULD API不同吗?2022-12-12 514
-
是否可以用VL53L5CX传感器开发检测孔和楼梯的应用程序呢2022-12-09 495
-
VL53L5CX #高达 8x8 多区域测距和 63°对角线宽视场 飞行时间多区域测距传感器2022-09-01 18238
全部0条评论

快来发表一下你的评论吧 !
