

如何验证ROS是否安装成功 ubuntu20.04教程
描述
验证ROS是否安装成功
按正常来说ROS到这里就安装完成了,现在我们来验证一下,输入以下命令:
roscore
如果出现了以下的问题:Command ‘roscore’ not found, but can be installed with:sudo apt install python3-roslaunch,按照提示输入sudo apt install python3-roslaunch命令并执行,成功后界面如下:
如果出现了以下的问题说明,之前的安装没有安装全
输入以下命令,把没安装的安装一下就好了(如果显示有几个安装包无法下载,是因为网络的原因重新输入以下命令就行了)
sudo apt install ros-noetic-desktop-full
如果出现了以下的问题:

可尝试输入以下命令:
source /opt/ros/noetic/setup.bash
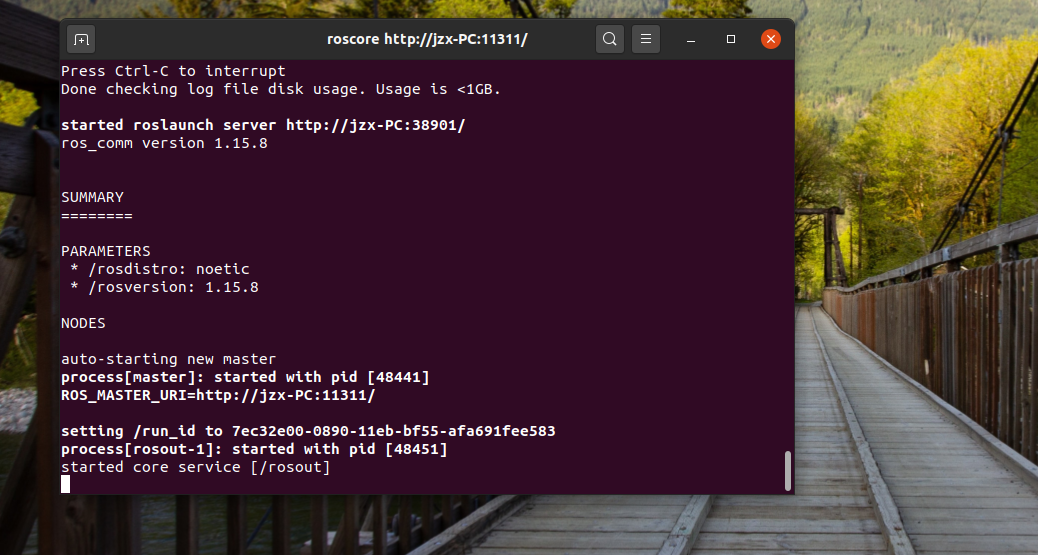
到这里再输入roscore看一下,若安装成功会显示如下界面:
然后我们启动一下小海龟的仿真器试一试,按ctrl+alt+t打开一个新的终端,输入以下命令:
rosrun turtlesim turtlesim_node
按ctrl+alt+t再打开一个新的终端,输入以下命令:
rosrun turtlesim turtle_teleop_key
这时候你按键盘上的↑↓←→键就可以控制小海龟移动了,那么恭喜你的ROS已经成功安装完了。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
系统适配 | RK3576适配Ubuntu20.04正式发布2025-07-31 2482
-
系统适配 | RK3588适配Ubuntu20.04发布预告2025-06-19 2284
-
Ubuntu20.04取消root账号自动登录的方法,触觉智能RK3568开发板演示2025-01-17 1828
-
【北京迅为】iTOP-LS2K0500开发板快速使用编译环境ubuntu20.04第一章加载迅为提供 Ubuntu20.042024-09-18 1524
-
如何在ubuntu20.04中添加和更新ROS软件源2023-12-01 3761
-
ubuntu20.04安装教程2023-11-13 4593
-
Windows11 wsl2安装Ubuntu-20.042023-08-16 2984
-
在Ubuntu20.04系统中,如何将Vivado编辑器配置成Vim?2023-01-31 1871
-
RK3588S-PC的ubuntu20.04系统上运行ros报错2022-12-30 24033
-
如何制作ubuntu20.04的文件系统2022-10-17 5064
-
【ROC-RK3568-PC开发板试用体验】Ubuntu20.04桌面系统体验升级与GCC安装2022-09-04 1557
-
如何搭建交叉编译环境?如何验证是否安装成功?2022-01-13 1258
-
怎样利用Ubuntu20.04去安装Mentor Calibre 2020?2021-06-23 3355
全部0条评论

快来发表一下你的评论吧 !
