

自动控制原理—分析闭环极点的方法
电子说
描述
1
前言
对控制系统极点的分析唯一的目的,就是看看控制系统的动静态特性。先看稳不稳定,再看响应快不快。
学习了这么多年,自我感觉,对于搞工程实践而言,分析零极点能够达到定性分析系统响应的目的,但是定量就不可能了,毕竟采样环节的建模无论如何都不是很精确的。
而如果是搞理论的话,还是可以定量分析的,比如拿几个控制系统,把它们的极点画出来,就能直观的看出不同系统的优缺点了。
本文理论不深,就简要说说分析极点的方法吧。
2
二阶系统
由于大部分控制系统都是闭环的,因此本文所说的都是闭环系统的极点。接下来就把工程中常遇到的二阶系统进行讲解。
2.1 二阶系统什么样
就是这样:
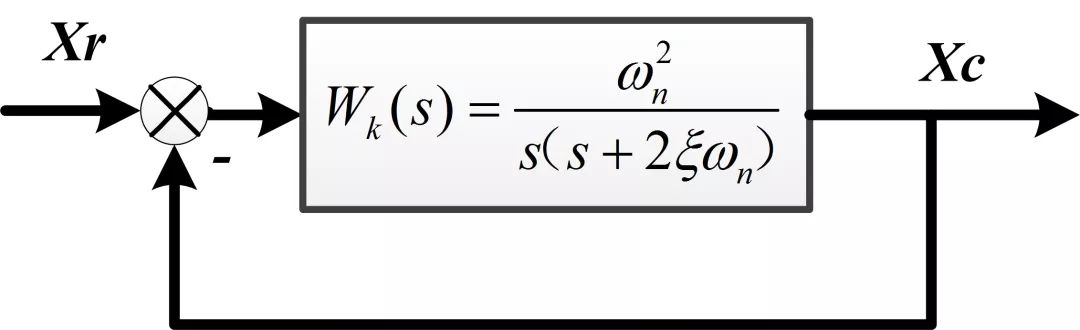
开环传递函数是:

闭环传递函数是:

其中,ξ为阻尼比,ωn为自然频率。
特征方程,就是求闭环传函分母等于零:

极点:
(1) 特征根的性质取决于ξ的大小;
(2) 二阶系统的响应时间取决于ξ和ωn两个参数。
2.2 过阻尼(ξ >1)
此时系统的极点都是实数。
(1) 对于过阻尼极点,它们的响应是按照指数形式,单调逐渐稳定到输入的。
(2) 极点距虚轴越近,对系统响应影响越大,且当ξ>>1时,影响度更大,此时可以忽略距离虚轴远的极点。
解释:二阶函数的时域阶跃响应如下:

设-p1<-p2<0,所以第一项衰减比第二项快,同第一项系数也比第二项小。进而可以得到,极点离虚轴越远,响应速度越快。
2.3 欠阻尼(0<ξ <1)
此时系统的极点都既有实部,又有虚部。
(1) 二阶系统的单位阶跃响应为衰减振荡曲线,且逐渐稳定到输入
(2) 系统的衰减程度与闭环的实部有关,离虚轴越远,衰减越快,这里与过阻尼特点一致。
(3) 系统的震荡程度与虚部有关,阻尼越小,超调越大。
解释:二阶函数的频域阶跃响应如下:

二阶函数的时域阶跃响应如下:

其中,θ为阻尼角,ωd为阻尼振荡频率。
整理:

极点的实部,出现在时域的指数上,为衰减项;
极点的虚部,出现在时域的正弦函数中,为震荡项;
2.4 稳定性
上面介绍的都是系统的暂态特性,下面说说系统的稳定性。
其实非常简单,我们只关注极点的实部。
从上面可知,无论是过阻尼还是欠阻尼,系统的指数项都是-pt。
1.当-p<0时,系统成指数衰减到稳态。
2.当-p>0时,系统随着时间在增加到无穷大,即系统发散,不稳定。
因此,闭环系统稳定的充要条件就是极点实部小于零,即系统所有闭环极点都在复平面的左半部分。
3
举一反三
上面介绍的性质亦可以引入到其它系统中,无论是多阶系统,过阻尼与欠阻尼。极点的性质都是一样的。
大家只需要记住:
(1) 闭环极点是成对出现的。
(2) 只要有极点在频率右半轴,系统就不稳定。
(3) 距离虚轴越远,对系统影响越小,甚至可以忽略。
(4) 极点的实部对应着系统的衰减项,距离虚轴越远,响应越快.
(5) 极点的虚部对应着系统的震荡项,阻尼越小,超调越大。
(6) 阻尼大于1,响应单调趋于稳定。阻尼小于1,响应震荡趋于稳定。
在分析高阶系统时,常常忽略距离虚轴较远的极点,使高级系统降阶,从而简化问题。
最后附上不同阻尼下的二阶闭环系统时域响应曲线。

-
自动控制系统的调试方法 自动控制系统与传统控制系统的比较2024-12-18 1986
-
自动控制原理及过程控制方法2024-06-11 7891
-
自动控制原理中,零点和极点对系统性能有什么影响?2023-11-08 16620
-
#硬声创作季 自动控制原理:闭环零、极点与开环零、极点的关系Mr_haohao 2022-11-03
-
自动控制概论2021-09-01 1724
-
自动控制原理知识点总结题型2021-07-12 1996
-
逆变式切割电源的极点配置双闭环控制资料详细说明2020-06-08 1151
-
自动控制的简介和发展与应用分析说明2020-05-13 1231
-
自动控制原理试题30套(附答案)2018-10-10 5894
-
《自动控制原理》MATLAB分析与设计2012-06-03 21590
-
自动控制系统综合分析软件的设计2010-07-06 858
-
自动控制原理课件下载2009-11-24 948
-
自动控制系统的设计--控制器极点配置方法2009-07-27 3461
-
自动控制原理-下载2009-01-08 770
全部0条评论

快来发表一下你的评论吧 !
