

旋转变压器与光电编码器区别及工作原理
MEMS/传感技术
描述
旋转变压器与光电编码器是目前伺服领域应用最广的测量传感器。
一、伺服系统
又称为随动系统,精确的跟随或者复现某个过程的反馈系统。
使物体的位置、方位、状态等输出被控量能够跟随目标(设定)的任意变化的自动控制系统
1.伺服电机的三种控制方式
①速度控制-模拟量
通过模拟量的输入或脉冲的频率进行转动速度的控制。
②转矩控制-模拟量
通过改变模拟量的设定或通过通讯方式改变对应的地址的数值来改变设定的力矩大小。
③位置控制-脉冲量
通过外部输入的脉冲的频率来确定转动速度的大小,通过脉冲的个数来确定转动的角度
也有些伺服可以通过通讯方式直接对速度和位移进行赋值
2.伺服电机的控制
伺服电机一般为三个环控制,就是3个闭环负反馈PID调节系统。
从内到外分别是电流环、速度环、位置环。
3.几个量的区别、联系
①模拟量:在时间和数值上都是连续变化的信号(比如电压、电流)。
经过抽样量化后就是数字量。
②数字量:在时间和数值上都是离散信号。其表示的信号则为数字信号
数字量是由0和1组成的信号,经过编码形成有规律的信号。
③脉冲量:在瞬间电压或电流由某一值跃变到另一值的信号量。
在量化后,其连续规律的变化就是数字量
如果其由0变成某一固定值并保持不变,其就是开关量
④开关量:开关量只有两种状态,0/1,包括开入量和开出量,反映的是状态。
二、旋转变压器
简称旋变,是一种输出电压随转子转角变化的信号元件。
励磁绕组以一定频率的交流电压励磁,输出绕组的电压幅值与转子转动角度
①正余弦函数关系 ,②或保持一定比例关系,③或成线性关系(一定转角范围)
1.磁阻式旋转变压器
①磁阻式旋转变压器输出绕组的电压幅值与转子转角成正余弦函数关系。
②励磁绕组和输出绕组安装在定子槽,励磁绕组和输出绕组的绕线不一样。
③两相的输出信号彼此相差90度。电压幅值与转角作正余弦变化。
④转子绕组随电机旋转,两个相差90度定子绕组固定,绕组就形成了一个具有角度依赖系数的变压器。
⑤通过调解两个信号,可获得电机的角度位置信息。
2.旋变的输入输出电压 函数关系:
设转子转动的角度为θ,励磁频率为f,Ea为信号幅度,时间为t
(励磁输入电压)E(r1-r2) = Ea*Sin(2π*f*t)
设传输比为K,设转子偏离原点角度为θ
(绕组输出电压)E(s1-s3) = K*Ea*Sin(2π*f*t)Cosθ
(绕组输出电压)E(s2-s4) = K*Ea*Sin(2π*f*t)Sinθ
旋转变压器的变压比:是指在规定励磁条件下,最大空载输出电压的基波分量与励磁电压的基波分量之比。
三、光电编码器
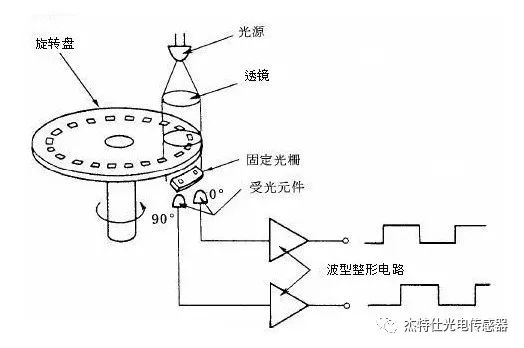
光电编码器的主要工作原理为光电转换,是一种通过光电转换将输出轴的机械几何位移量转换为脉冲或数字量的传感器。
构成:光栅盘和光电检测装置
工作原理:光栅盘与电动机同轴使电机旋转带动光栅盘旋转,光电检测装置输出脉冲信号,根据该信号计算转速。
种类:刻度方法和信号输出形式的不同可分为增量型、绝对型和混合型。
1.增量式编码器
①工作原理:光电转换
②输出的是A、B、Z三组方波脉冲,其中A、B两脉冲相位差相差90度以判断电动机的旋转方向,Z脉冲为每转一个脉冲以便于基准点的定位。
2. 绝对式编码器
①工作原理:光电转换
②但其输出的是数字量,在码盘上有若干同心码道,码道由透光和不透光的扇形区间交叉构成,码道数是其码盘的二进制数码位数,码盘的两侧是光源和光敏元件,码盘位置的不同光敏元件受光情况不同输出不同二进制数,来判断码盘位置。
四、小结
①光电编码器直接输出数字信号,处理简单,容易提高分辨率,缺点不耐冲击,不耐高温,易受辐射干扰。
②旋转变压器具有耐冲击、耐高温、耐油污、高可靠、长寿命等优点,其缺点是输出为调制的模拟信号,输出信号解算较复杂。
审核编辑:黄飞
-
新能源汽车旋转变压器的工作原理及应用2023-01-13 4367
-
旋转变压器与光电编码器简析2021-09-28 2065
-
浅析伺服系统与旋转变压器及光电编码器2021-09-27 3422
-
伺服电机&旋转变压器&光电编码器相关资料分享2021-06-28 1354
-
伺服电机&旋转变压器&光电编码器相关资料下载2021-06-27 1768
-
AN-263:旋转变压器到数字转换;光学轴角编码器的简单替代方案2021-04-24 1217
-
旋转变压器的工作原理及作用特点是什么2019-12-04 32356
-
旋转变压器与编码器的区别2019-06-11 16234
-
光电编码器分类2018-10-21 17477
-
旋转变压器的角度误差校正系统设计2018-03-14 1945
-
带你认识“旋转变压器”2016-10-26 27695
-
基于旋转变压器移相编码的工程设计2011-05-31 2075
-
旋转变压器编码器用户手册2009-11-26 2620
-
旋转变压器工作原理2008-07-18 6216
全部0条评论

快来发表一下你的评论吧 !
