

VASSPLC提示机器人铣削故障
工业控制
描述
KF 电机 / 接近开关故障 STE 电极帽修磨器电机/接近开关故障
焊接短路故障 STE 焊接短路故障
集中故障 (KF, KS, ZS) STE 集中故障 (KF, KS, ZS)
KS 电机/终点位置故障 STE 电极帽旋转器电机/终点位置故障
停止进行修正 MT0 在过程之前停止或者停止进行修整。
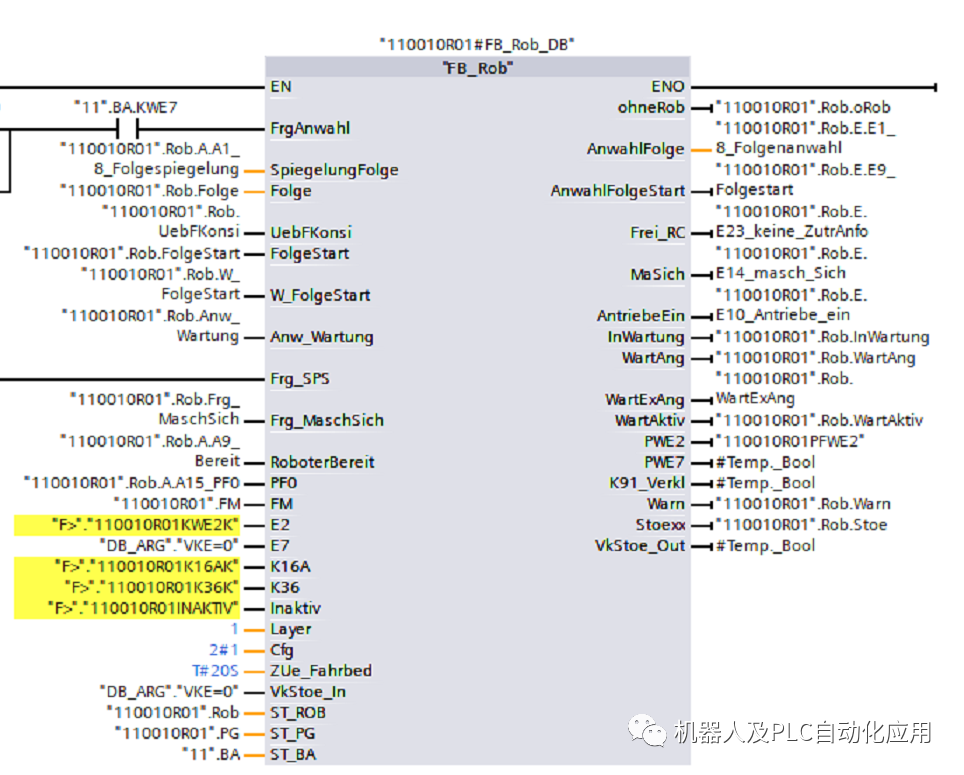
(* 对接中断 *)
xF_Docking_Stoe := BYTE_TO_BOOL(SHR(IN:=_ST_ROB.A113_120_Dock_Fraes,N:=2)) AND NOT AnwORob;
(* 对接堵塞指示器 *)
xF_Docking_VA := BYTE_TO_BOOL(SHR(IN:=_ST_ROB.A113_120_Dock_Fraes,N:=1)) AND NOT AnwORob;
(* 错误KS(旋转盖)发动机/末端位置 *)A117
xF_KS := BYTE_TO_BOOL(SHR(IN:=_ST_ROB.A113_120_Dock_Fraes,N:=4)) AND NOT AnwORob;
(* 错误KF(切帽机)电机/启动器 *)A118
xF_KF := BYTE_TO_BOOL(SHR(IN:=_ST_ROB.A113_120_Dock_Fraes,N:=5)) AND NOT AnwORob;
(* 短路焊接错误 *)A119
xF_KSS := BYTE_TO_BOOL(SHR(IN:=_ST_ROB.A113_120_Dock_Fraes,N:=6)) AND NOT AnwORob;
(* 误差集体扰动(KF、KS、ZS) *)A120
xF_SST := BYTE_TO_BOOL(SHR(IN:=_ST_ROB.A113_120_Dock_Fraes,N:=7)) AND NOT AnwORob;
机器人发出铣削故障:
O_RSK_F_KS=117
O_RSK_F_KF=118
O_RSK_F_Kurz=119
O_RSK_F_Sam=120
;错误KS电机/结束位置A117
$OUT[O_RSK_F_KS]=$OUT[O_R_Auto] AND ($FLAG[F_RSK_KS_Ruh] OR $FLAG[F_RSK_KS_Arb])
;错误KF电机/启动器A118
$OUT[O_RSK_F_KF]=$OUT[O_R_Auto] AND $FLAG[F_RSK_KF]
;短路焊接故障A119
$OUT[O_RSK_F_Kurz]=$OUT[O_R_Auto] AND $FLAG[F_RSK_Kurz]
集体故障A120
$OUT[O_RSK_F_Sam]=$OUT[O_R_Auto] AND $OUT[O_R_PERI_RDY] AND ($FLAG[F_RSK_KF] OR $FLAG[F_RSK_KS_Ruh] OR $FLAG[F_RSK_KS_Arb] OR $FLAG[F_RSK_Kraft] OR $FLAG[F_RSK_Mess] OR $FLAG[F_RSK_Kurz] OR $FLAG[F_RSK_Vers] OR $FLAG[F_RSK_Sammel] OR $FLAG[F_KF_KS_ZS_S])
审核编辑:黄飞
-
KUKA机器人铣削控制2023-05-31 2686
-
KUKA机器人固定焊钳的铣削控制2023-04-13 1788
-
ABB机器人伺服电机维修常见故障是什么?2021-09-29 2998
-
KUKA机器人伺服驱动模块维修2021-09-17 1870
-
工业机器人故障诊断实训平台结果2021-07-01 1937
-
青岛发那科机器人SERVO-062伺服报警故障维修2020-10-12 5225
-
KUKA焊接机器人伺服电机常见故障及维修处理2020-09-26 8006
-
ABB机器人发生不一致路径精确性故障维修2020-09-09 2438
-
发那科2000iB机器人焊接时出现焊点整体偏移故障维修2020-09-07 1971
-
库卡工业机器人显示HPU或者RCP故障维修2020-09-04 1448
-
青岛ABB工业机器人无法正常进入系统故障维修2020-07-16 2048
-
工业机器人的技术原理2018-11-23 5076
-
nao机器人与其他机器人的区别2015-02-13 6966
-
酷卡机器人提示要求调零的目的是什么?2015-01-14 6097
全部0条评论

快来发表一下你的评论吧 !
