

卡尔曼滤波的原理和C代码
描述
卡尔曼滤波(Kalman Filter)是一种递归的、自适应的滤波算法,广泛应用于估计系统状态和观测过程中的噪声。它最初在1960年被提出,被认为是控制理论和信号处理领域中最重要的发展之一。卡尔曼滤波器在许多领域,包括导航、机器人、金融和通信系统中都有广泛的应用。
1,基本原理:
卡尔曼滤波器的核心思想是融合系统的动态模型和实际的观测数据,通过对过程和测量噪声的估计,提供对系统状态的最优估计。其基本原理可以分为两个步骤:预测(Predict)和更新(Update)。
预测(Predict):
在预测阶段,卡尔曼滤波器使用系统的动态模型,以及先前的状态估计来预测系统的下一个状态。这一过程基于系统的状态方程和控制输入,考虑系统的动态演变。预测的结果是对系统状态的先验估计,其中考虑了系统的动态行为。卡尔曼滤波的状态方程通常表示为:
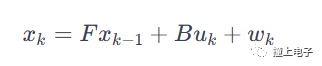
其中,Xk是系统状态向量,F 是状态转移矩阵,B 是输入矩阵,Uk是控制输入向量,Wk是过程噪声。
更新(Update):
在更新阶段,卡尔曼滤波器使用实际的测量数据来校正先前的状态估计。这一过程基于测量方程和测量噪声,考虑了观测到的系统输出。更新的结果是对系统状态的后验估计,其中融合了测量信息。
卡尔曼滤波的测量方程通常表示为:
��=���+��
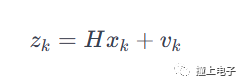
其中,Zk是测量向量,H是测量矩阵,Vk测量噪声。
2,状态估计的迭代过程:
卡尔曼滤波是一个迭代的过程,其更新步骤依赖于预测和测量的相互作用。以下是卡尔曼滤波的迭代过程:
初始化: 首先,需要初始化卡尔曼滤波器的状态估计(X0)和协方差矩阵(P0)
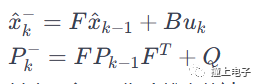
预测: 使用系统的状态方程进行状态的预测,并更新状态的协方差矩阵。这一步考虑了系统的动态演变和过程噪声。其中,Xk是先验状态估计,Pk是先验协方差矩阵,Q是过程噪声协方差矩阵。
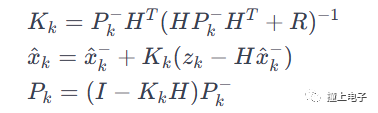
测量更新: 使用测量方程将预测的状态与实际的测量数据进行比较,从而校正状态估计,并更新协方差矩阵。这一步考虑了观测到的系统输出和测量噪声。其中,Kk 是卡尔曼增益,R是测量噪声协方差矩阵,Xk 是后验状态估计,Pk 是后验协方差矩阵。
重复: 重复预测和测量更新步骤,将后验状态估计作为下一步的先验状态估计,持续迭代。
3,关键概念:
卡尔曼增益: 卡尔曼增益是一个关键的概念,它决定了预测和测量更新之间的相对权重。卡尔曼增益越大,系统对测量数据的依赖性越强,反之亦然。
协方差矩阵: 协方差矩阵描述了状态估计的不确定性。通过在迭代过程中更新协方差矩阵,卡尔曼滤波器能够动态调整对状态估计的信任程度。
过程噪声和测量噪声: 过程噪声和测量噪声是卡尔曼滤波中的两个关键参数,它们用于描述系统动态模型和测量过程中的不确定性。适当估计和调整这些噪声是卡尔曼滤波器性能的关键。
4,示例代码:
#include // 定义状态向量的维度#define STATE_DIM 2// 定义测量向量的维度#define MEASURE_DIM 1
// 定义卡尔曼滤波器结构体typedef struct { // 状态估计向量 float x[STATE_DIM]; // 状态协方差矩阵 float P[STATE_DIM][STATE_DIM]; // 过程噪声协方差矩阵 float Q[STATE_DIM][STATE_DIM]; // 测量噪声协方差矩阵 float R[MEASURE_DIM][MEASURE_DIM]; // 状态转移矩阵 float F[STATE_DIM][STATE_DIM]; // 测量矩阵 float H[MEASURE_DIM][STATE_DIM];} KalmanFilter;
// 初始化卡尔曼滤波器void kalmanFilterInit(KalmanFilter *kf, float initialX, float initialP);// 卡尔曼滤波预测步骤void kalmanPredict(KalmanFilter *kf, float controlInput);// 卡尔曼滤波更新步骤void kalmanUpdate(KalmanFilter *kf, float measurement);
int main() { // 初始化卡尔曼滤波器 KalmanFilter kf; kalmanFilterInit(&kf, 0.0, 1.0);
// 模拟输入数据 float controlInput = 0.1; float measurementNoise = 0.5;
// 模拟10次迭代 for (int i = 0; i < 10; ++i) { // 预测步骤 kalmanPredict(&kf, controlInput); // 模拟测量 float trueMeasurement = 2.0 * kf.x[0] + measurementNoise; // 更新步骤 kalmanUpdate(&kf, trueMeasurement);
// 打印结果 printf("Iteration %d - True Value: %f, Estimated Value: %f\n", i + 1, trueMeasurement, kf.x[0]); }
return 0;}
// 初始化卡尔曼滤波器void kalmanFilterInit(KalmanFilter *kf, float initialX, float initialP) { // 初始化状态估计向量 kf->x[0] = initialX; kf->x[1] = 0.0; // 初始化状态协方差矩阵 kf->P[0][0] = initialP; kf->P[0][1] = 0.0; kf->P[1][0] = 0.0; kf->P[1][1] = initialP; // 初始化过程噪声协方差矩阵 kf->Q[0][0] = 0.001; kf->Q[0][1] = 0.0; kf->Q[1][0] = 0.0; kf->Q[1][1] = 0.001; // 初始化测量噪声协方差矩阵 kf->R[0][0] = 0.01;
// 初始化状态转移矩阵 kf->F[0][0] = 1.0; kf->F[0][1] = 1.0; kf->F[1][0] = 0.0; kf->F[1][1] = 1.0; // 初始化测量矩阵 kf->H[0][0] = 1.0; kf->H[0][1] = 0.0;}
// 卡尔曼滤波预测步骤void kalmanPredict(KalmanFilter *kf, float controlInput) { // 预测状态估计 kf->x[0] = kf->F[0][0] * kf->x[0] + kf->F[0][1] * kf->x[1] + controlInput; // 预测状态协方差矩阵 kf->P[0][0] = kf->F[0][0] * kf->P[0][0] * kf->F[0][0] + kf->F[0][1] * kf->P[1][0]; kf->P[0][1] = kf->F[0][0] * kf->P[0][1] * kf->F[0][1] + kf->F[0][1] * kf->P[1][1]; kf->P[1][0] = kf->F[1][0] * kf->P[0][0] * kf->F[0][0] + kf->F[1][1] * kf->P[1][0]; kf->P[1][1] = kf->F[1][0] * kf->P[0][1] * kf->F[0][1] + kf->F[1][1] * kf->P[1][1] + kf->Q[1][1];}// 卡尔曼滤波更新步骤void kalmanUpdate(KalmanFilter *kf, float measurement) { // 计算卡尔曼增益 float K[STATE_DIM][MEASURE_DIM]; float S;
// 计算卡尔曼增益 S = kf->H[0][0] * kf->P[0][0] * kf->H[0][0] + kf->R[0][0]; K[0][0] = kf->P[0][0] * kf->H[0][0] / S; K[1][0] = kf->P[1][0] * kf->H[0][0] / S;
// 更新状态估计 kf->x[0] = kf->x[0] + K[0][0] * (measurement - kf->H[0][0] * kf->x[0]); kf->x[1] = kf->x[1] + K[1][0] * (measurement - kf->H[0][0] * kf->x[0]);
// 更新状态协方差矩阵 kf->P[0][0] = (1 - K[0][0] * kf->H[0][0]) * kf->P[0][0]; kf->P[0][1] = (1 - K[0][0] * kf->H[0][0]) * kf->P[0][1]; kf->P[1][0] = -K[1][0] * kf->H[0][0] * kf->P[0][0] + kf->P[1][0]; kf->P[1][1] = -K[1][0] * kf->H[0][0] * kf->P[0][1] + kf->P[1][1];}
卡尔曼滤波的优势在于它能够提供对系统状态的最优估计,同时适应于线性和高斯噪声的系统。然而,卡尔曼滤波也有一些限制,例如对非线性系统的适应性较差,且需要对系统动态模型和噪声参数进行良好的估计。
-
卡尔曼滤波家族2024-01-14 2809
-
什么是卡尔曼滤波?卡尔曼滤波的作用是什么2023-08-08 9758
-
浅析卡尔曼滤波2023-06-14 3309
-
卡尔曼滤波(KF)与扩展卡尔曼(EKF)2023-05-10 1042
-
卡尔曼滤波原理及应用2022-06-09 581
-
卡尔曼滤波器的使用原理2021-08-17 1549
-
卡尔曼滤波有哪些应用2021-07-12 2114
-
卡尔曼滤波c++代码2020-04-18 1446
-
请问有加速度计的卡尔曼滤波C代码吗2019-07-09 2839
-
卡尔曼滤波算法2016-12-17 1233
-
卡尔曼滤波器[附带例程]通俗易懂2016-09-27 1296
-
卡尔曼滤波学习及应用2016-04-13 1031
-
卡尔曼滤波2013-07-04 3155
全部0条评论

快来发表一下你的评论吧 !
