

使用 Bi-Level 模仿学习仿真现实交通行为
描述
无论是突然加塞(cut-in),还是无意地 U 形掉头,人类驾驶员的行为通常难以预测。行为的不可预测性源自人类决策过程的天然复杂性, 往往受多种因素的影响,而且在不同的运行设计域(ODD)和国家也会有所不同,因此很难在仿真中模拟驾驶行为。
但自动驾驶汽车(AV)的开发人员需要有把握地开发和部署能够在不同 ODD 环境以及多样的交通行为下运行的驾驶系统。NVIDIA Research 团队最近发表的论文 BITS: Bi-Level Imitation for Traffic Simulation 中概述了一种仿真现实世界交通行为的新方法,该方法可以帮助开发人员做到这一点。
交通仿真 Bi-Level 模仿(BITS)是一种交通模型,该模型能够以惊人的逼真度还原现实世界的复杂性,而且性能超过了以往的方法。在该论文详细介绍的一个试验中,BITS 的覆盖范围和多样性较性能次佳的模型分别提高了 64% 和 118%,失败率降低了 36%。
图 1. BITS 通过解耦交通模型构建过程,实现更加逼真的交通仿真
构建交通模型所面临的挑战
大多数仿真工具通过回放原始记录的数据或使用预定义的基于规则的交通系统来建模交通模型,以表达车辆行为。
虽然回放(数据)可以准确的查看和测试实际驾驶中遇到的特定场景,但却很难仿真记录之外的行为。另一方面,基于规则的控制器只能仿真简单的行为,无法准确仿真更复杂的情况。
除此之外,基于学习的方法,在现实世界的驾驶日志上训练而成,可生成逼真的未来轨迹。虽然这些模型已被证明能够有效创建准确、动态的驾驶路径,但它们很难生成多元的遵守道路边界以及有其他智能体参与的轨迹。
BITS 将 AI 模型解耦成高级意图理解和用来实现意图的 Low-level 控制器。通过这种方式,该模型能够合成与现实世界行为十分相似的各种交通模式,还能生成特定的场景。
在与其他 AI 加持的交通模型一起运行时,BITS 可以在保持低失败率的情况下,持续展示出多样的交通模式(图 2)。

图 2. BITS 的覆盖范围和多样性水平最高,失败率最低
BITS 方法
BITS 能达到高保真度和多样性,要归功于其层次化的模型结构。
该模型的两个分支均基于现实世界的交通日志上训练而成。High-level 分支用于预测车辆的潜在目标,Low-level 分支用于生成实现潜在目标的策略。通过任务分解,从而将为不同轨迹建模的任务交给 High-level 分支,而目标导向的 Low-level 策略生成能够更加高效地运行。
BITS 还包含一个预测与规划模块,有助于在新环境和大跨度的时间内稳定模型表现。为此,该模块会评估模型的可能轨迹并选择那些遵循合理驾驶行为规则的轨迹,降低了偏离合理行为的风险。
评估 BITS 的质量
确定一个交通模型的表现是否真实,以及其是否能生成准确的、未见过的新场景本身就很困难。因为并没有真值可做直接比较。因此,评估 BITS 交通模型本身就具有挑战性。
正如 BITS: Bi-Level Imitation for Traffic Simulation 中所详细介绍的,研究人员进行了三个层面的评估:试运行指标(覆盖范围、多样性和失败率)、与真实世界相比的统计差异以及与人类驾驶员的相似度。
第一个层面的评估直接衡量 Low-Level 分支的覆盖范围、每次运行的多样性以及碰撞或偏离道路的驾驶事故的频率。第二个层面的评估将仿真环境里的汽车速度和加速度差异与真实世界的数据进行比较。第三个层面的评估通过与预测模型比较来衡量行为是否与人类驾驶员相似,该预测模型可预测智能体在给定时刻的位置。
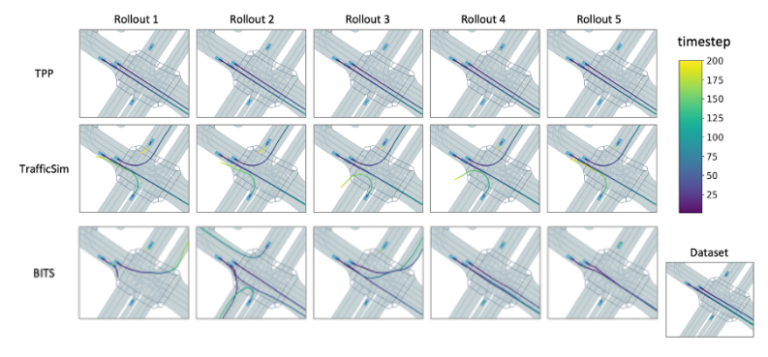
图 3. 比较各种基于学习的交通模型所规划的轨迹
如图 2 和图 3 所示,其他模型在生成多样化轨迹和陷入重复行为之间作出权衡,而 BITS 每次都绘制出新的场景,且失败率较低。
总结
在仿真中模仿现实交通行为的能力对于开发强大的自动驾驶技术至关重要。通过优化保真度和多样性,BITS 使 AI 生成的交通仿真更加接近真实世界的复杂程度。NVIDIA 的目标是进一步开发和完善 BITS,并最终将其集成到 NVIDIA DRIVE Sim 的生产管线中。
欢迎业界在仿真流程中使用该工作并参与贡献,已在 GitHub 上开源:https://github.com/NVlabs/traffic-behavior-simulation。NVIDIA 还在构建并开源 trajdata,该软件工具能够统一不同自动驾驶数据集的数据格式,并将现有数据集中的场景转换成交互式仿真环境。
了解更多
-
适用于自动驾驶汽车的解决方案
https://www.nvidia.cn/self-driving-cars/
-
BITS 现已在 GitHub 上开源
https://github.com/NVlabs/traffic-behavior-simulation
GTC 2024 将于 2024 年 3 月 18 至 21 日在美国加州圣何塞会议中心举行,线上大会也将同期开放。点击 “阅读原文” 或扫描下方海报二维码,立即注册 GTC 大会。
原文标题:使用 Bi-Level 模仿学习仿真现实交通行为
文章出处:【微信公众号:NVIDIA英伟达企业解决方案】欢迎添加关注!文章转载请注明出处。
- 相关推荐
- 热点推荐
- 英伟达
-
自动驾驶中常提的模仿学习是什么?2026-01-16 2328
-
如何对基于51单片机交通灯程序进行设计与仿真2021-11-09 1513
-
模型驱动的分布式卫星终端用户行为仿真2021-06-11 795
-
基于生成对抗网络的模仿学习研究综述2021-05-10 1122
-
如何设计交通灯?2019-10-10 3270
-
智能交通行业有哪些值得关注2019-06-27 2623
-
如何使用区域道路实况数据进行交通行为谱分析的方法说明2019-03-29 1247
-
渣土车管理恶疾 源头竟是从交通违法行为从始2018-06-13 1490
-
AOBO在交通行业应用设计解决方案2017-10-13 927
-
2014年城市智能交通行业分析2016-12-19 806
-
Simulink建模仿真实例快速入门2015-12-28 2997
-
【labview课程设计】基于labview的交通灯模拟系统2011-12-31 159174
-
Bi-directional level shifter for I2C-bus and other systems.2009-05-12 5092
全部0条评论

快来发表一下你的评论吧 !
