

VASS06机器人关于A23的用法控制
工业控制
描述
编程“无访问要求”/“保护栅锁定”E23/A23 该功能必须在相应机器人程序(序列和子程序)的每个精度点进行编程。 这个函数不能在一集的第一点和最后一点调用!
X: PTP VB=100% VE=0% ACC=100% RobWzg=1 Base=1 SPSTrig=5 [1/100s] …… X: WARTE BIS E23 ~ PLC间隙 Y: FB PSPS = …… I_R_k_ZutrA=23 / E23 请求打开安全门
O_R_SG_gesp=23 /A23 机器人到达请求位置发出
IF(($OUT[O_R_WSLAV]OR $OUT[O_R_WPROZ]) AND ($FLAG[F_RSK_Gst]OR $OUT[O_RSK_F_Sammel]) AND NOT b_SG_Hilf AND ((NOT HM_Prozess1 AND NOT HM_Prozess2) OR (($ROB_TIMER-My_SG_Timer)>PROCPAR[90])))THEN
(A4058执行循环程序或者A4057) ,(F321顺序块原位或者A120总故障),没有 b_SG_Hilf涂胶故障,HM_Prozess1 选择则工具HM_Prozess2选择则工具,机器人运行时间减去安全门时间大于规定时间
$OUT[O_R_SG_gesp]=FALSE 关闭A23
ELSE
$OUT[O_R_SG_gesp]=TRUE 启动A23
ENDIF 而实际上是在VASS05的基础上改良的 X: PTP VB=100% VE=0% ACC=100% RobWzg=1 Base=1 SPSTrig=5 [1/100s] 1: FB PSPS = EIN 2: A23 = AUS ~ 保护栅已释放 …… X: WARTE BIS E23 ~ PLC间隙 Y: A23 = EIN ~ 保护栅锁定 其核心原理是给人以提示,人员是可以进入自动工位的.
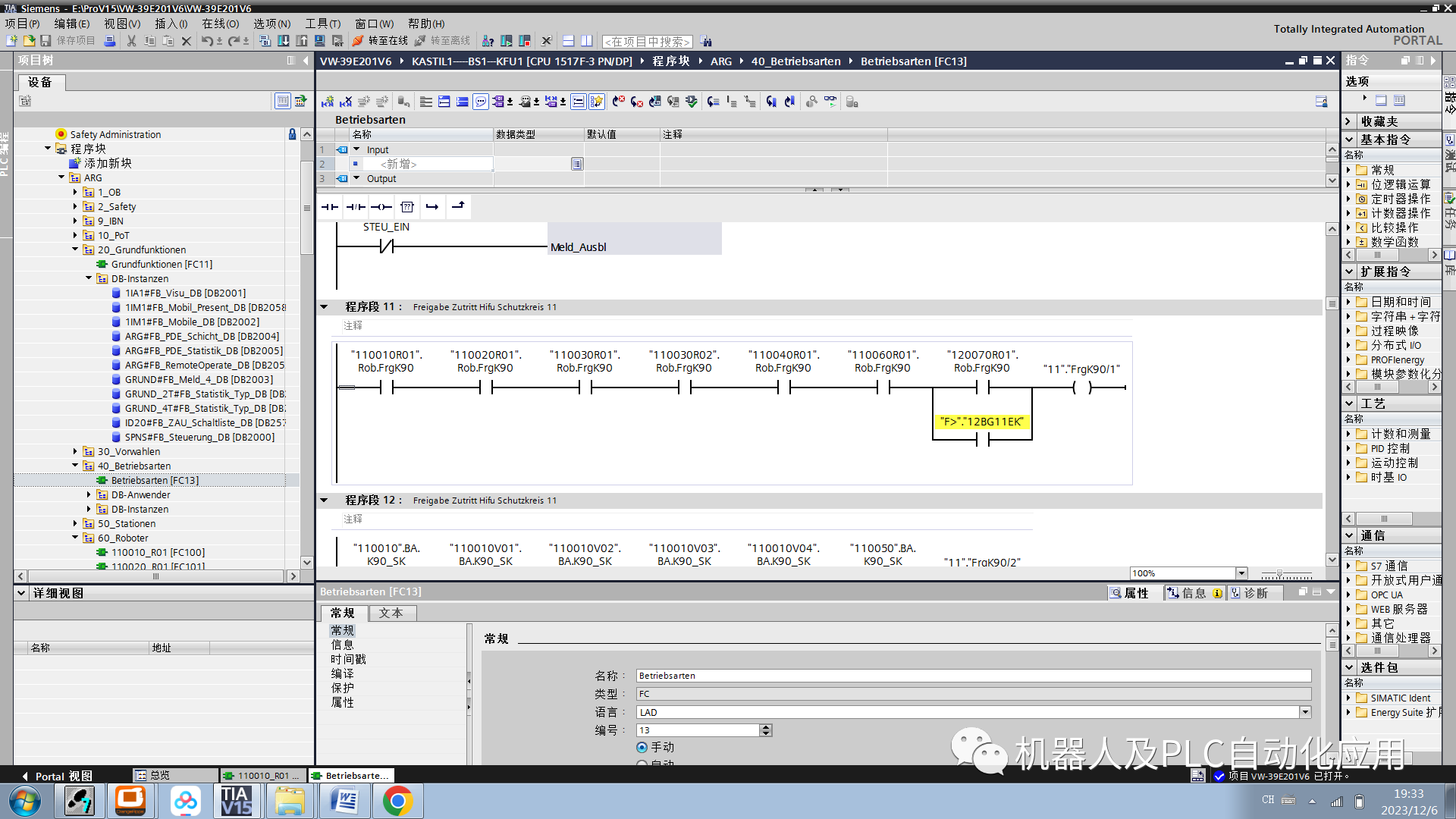
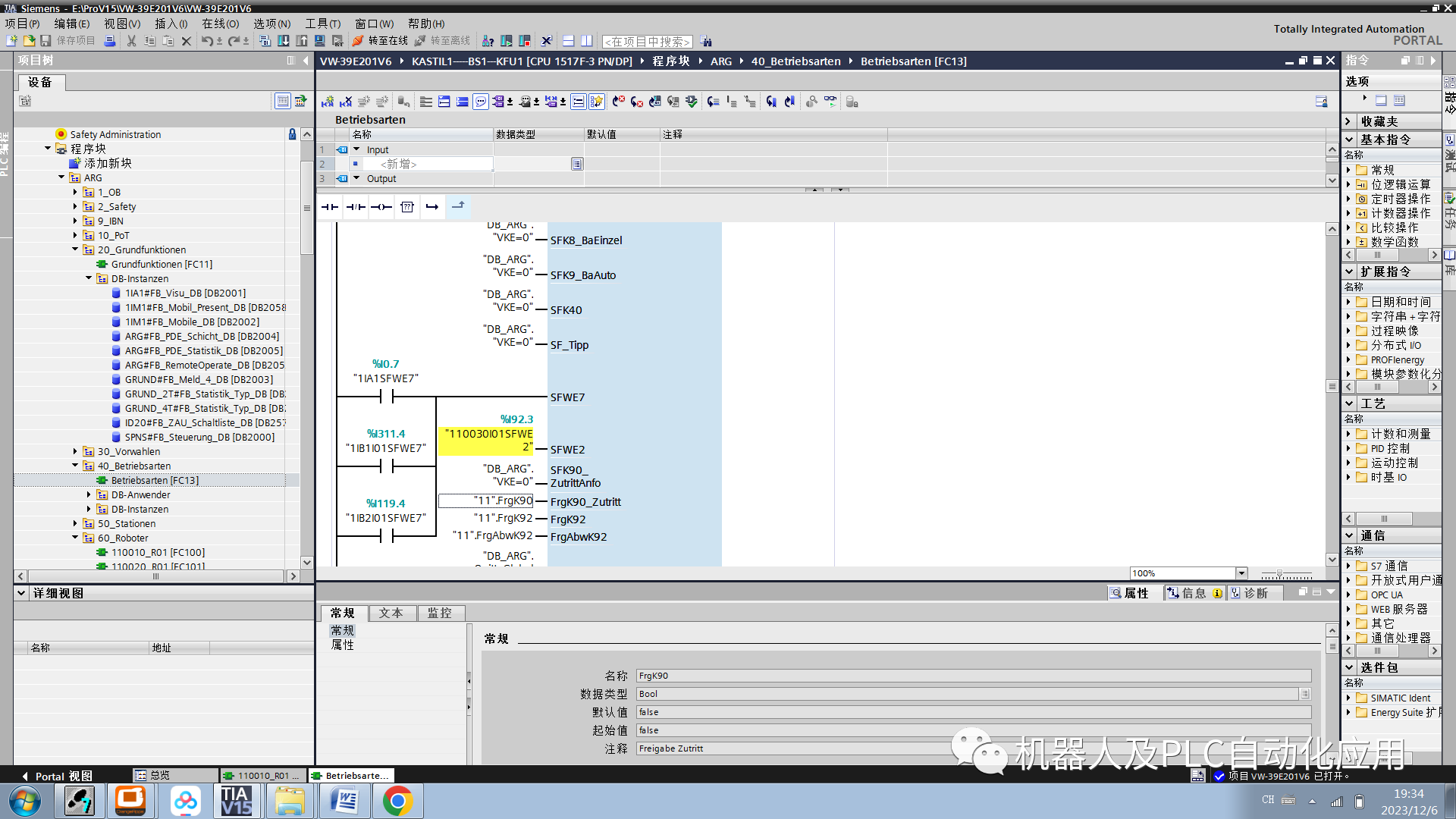
FrgK90_Zutritt 允许进入
审核编辑:黄飞
-
LPC2106在足球机器人控制中的应用设计2009-03-28 3602
-
如何远程控制机器人?2014-10-25 5059
-
关节机器人控制2015-04-29 5483
-
先进机器人控制2017-09-19 4613
-
机器人、协作机器人和移动机器人,你分的清楚吗2018-10-30 4136
-
机器人系统与控制需求简介2021-09-08 2359
-
机器人的控制系统2021-09-13 1983
-
什么是机器人控制系统2021-10-11 3667
-
智能机器人2021-10-13 26199
-
机器人是什么?2022-03-31 22319
-
全志A33原理图a33(a23)资料下载2018-01-19 4206
-
关于工业机器人的控制方式2019-06-18 4684
-
A23平板电脑的电路原理图免费下载2020-05-28 4084
-
博途VASS06的CPU设置要求2020-12-23 5429
-
大众VASS06报警信息提示功能2023-01-05 2768
全部0条评论

快来发表一下你的评论吧 !
