

基于S7-200SMART的机械手PLC控制系统的设计案例
工业控制
描述
PART 01
机械手PLC控制系统的设计
在自动化流水线中,机械手的应用比较广泛,它是集多种工作方式于一身的典型案例。本节将以机械手自动控制为例,重点讲解含多种工作方式的PLC控制系统的设计。
PART 02 机械手的控制要求及功能简介
某工件搬运机械手工作示意图,如图7-12所示。该机械手的任务是将工件从A传送带搬运到B传送带上来(A、B传送带不用PLC控制)。机械手的初始状态为原点位置,此时机械手在最上面和最右面,且夹紧装置处于放松状态。
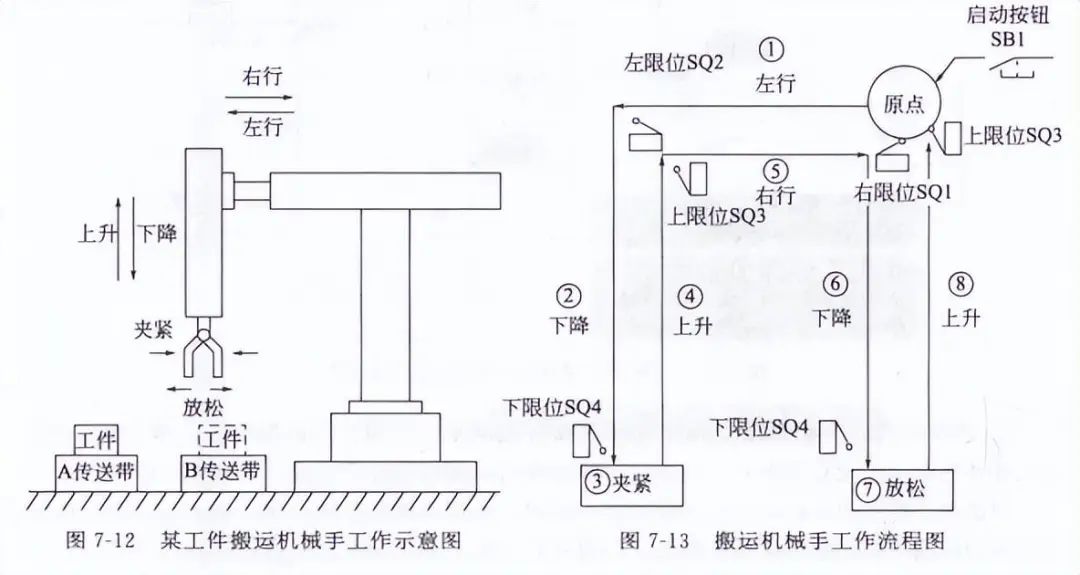
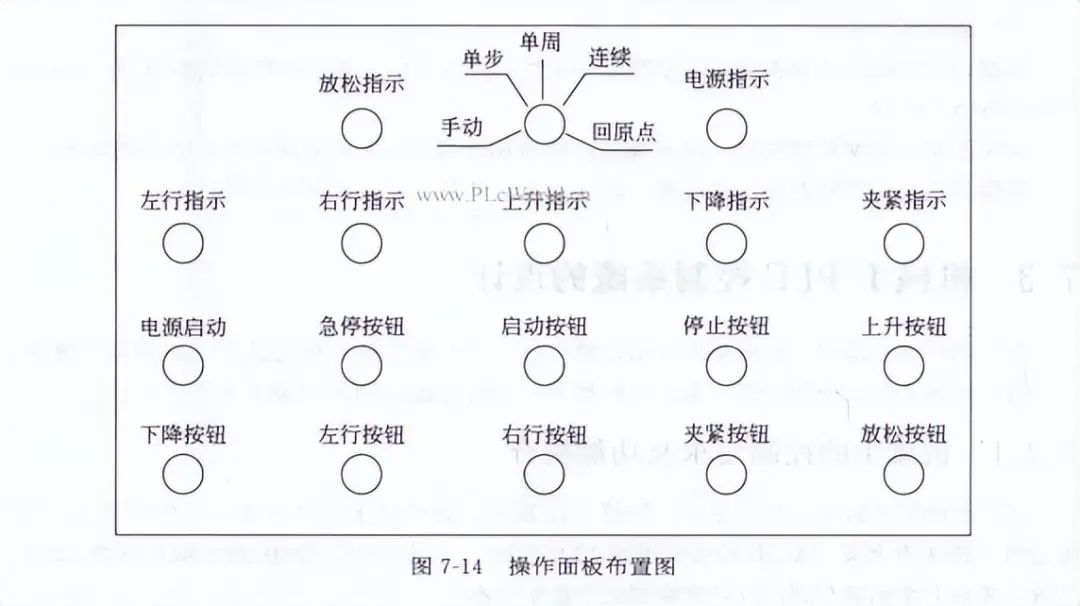
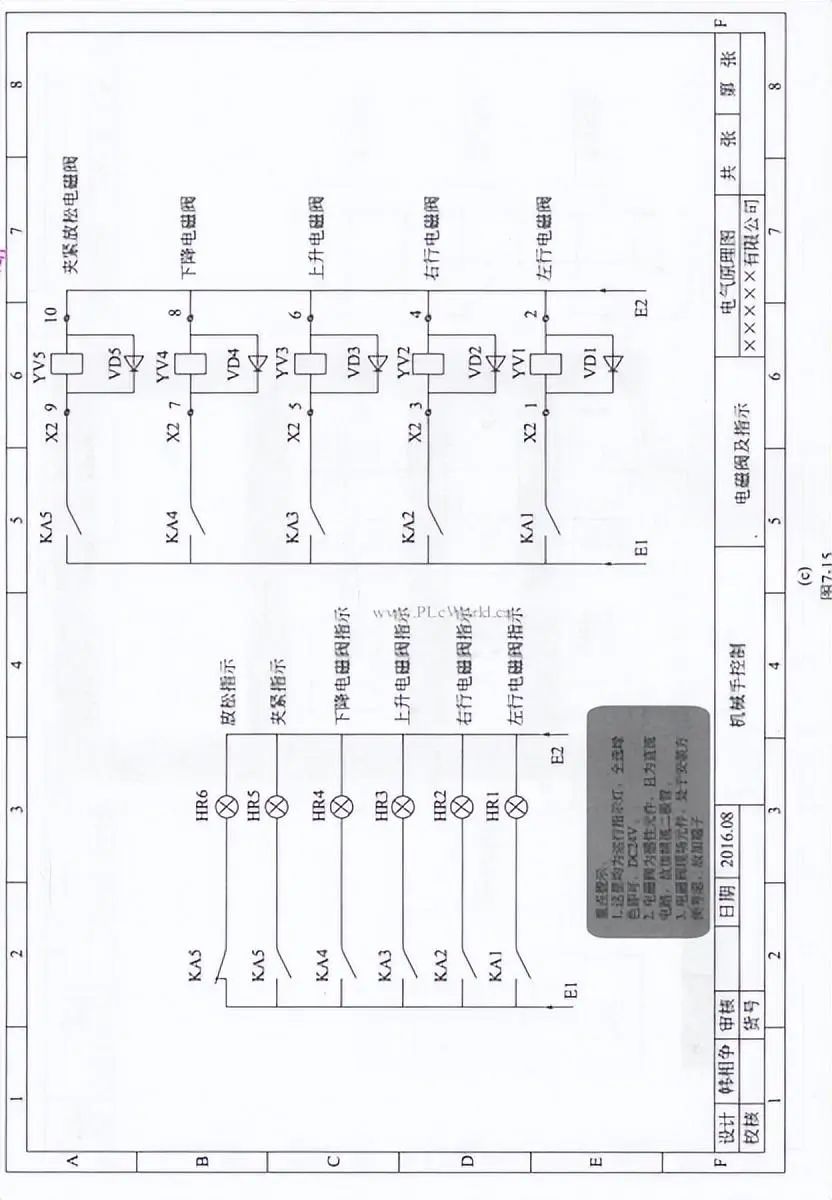
搬运机械手工作流程图,如图7-13所示。按下启动按钮后,从原点位置开始,机械手将执行“左行→下降→夹紧→上升→右行→下降→放松→上升”的工作流程一个周期。这些动作均由电磁阀来控制,特别的,夹紧和放松动作仅由一个电磁阀来控制,该电磁阀状态为1表示夹紧,否则为放松状态。左行、右行、上升、下降这些动作由限位开关来切换,夹紧、放松动作由定时器来切换,且定时时间为ls。为了满足实际生产的需求,将机械手设有手动和自动2种工作模式,其中自动工作模式又包括单步、单周、连续和自动回原点4种方式。操作面板布置,如图7-14所示。
(1)手动工作方式
利用按钮对机械手每个动作进行单独控制。在该工作方式中,设有6个手动按钮,分别控制左行、右行、上升、下降、夹紧和放松。
(2)单步工作方式
从原点位置开始,每按一下启动按钮,系统跳转一步,完成该步任务后自动停止在该步,再按一下启动按钮,才开始执行下一步动作。单步工作方式常常用于系统的调试和维修。
(3)单周工作方式
按下启动按钮,机械手从原点开始,按图7-13工作流程完成一个周期后,返回原点并停留在原点位置。
(4)连续工作方式
机械手在原点位置时,按下启动按钮,机械手从原点位置开始,将按图7-13工作流程周期性循环动作。按下停止按钮,机械手并不马上停止工作,待完成最后一个周期工作后,系统才返回并停留在原点位置。
(5)自动回原点工作方式
机械手有时可能会停止在非原点位置,这时机械手无法进行自动工作方式,所以需对机
械手的位置进行调整,当按下启动按钮时,机械手会按其回原点程序由其他位置回到原点位置。
PART 03 PLC及相关元件选型
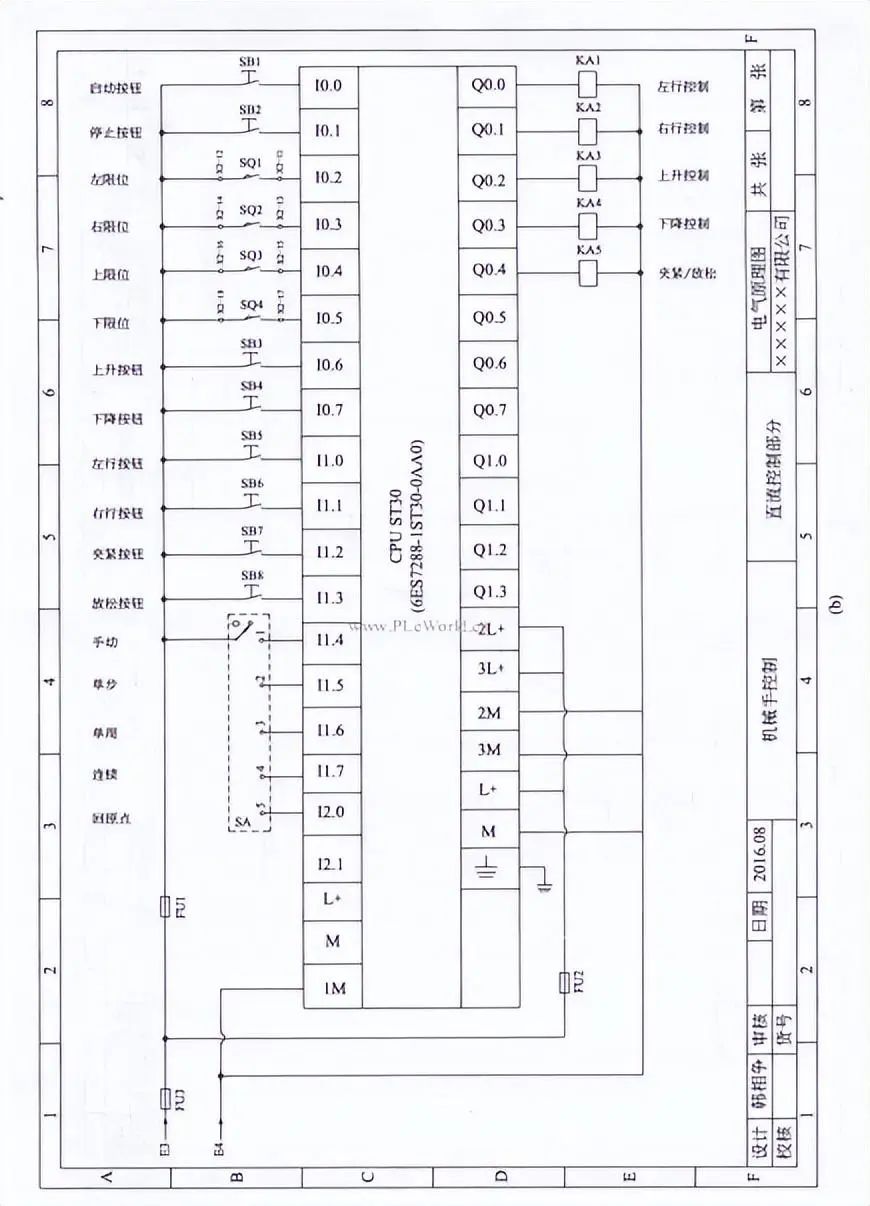
机械手自动控制系统采用西门子S7-200SMART PLC,CPUST30模块,DC供电,DC
输入,晶体管输出型。
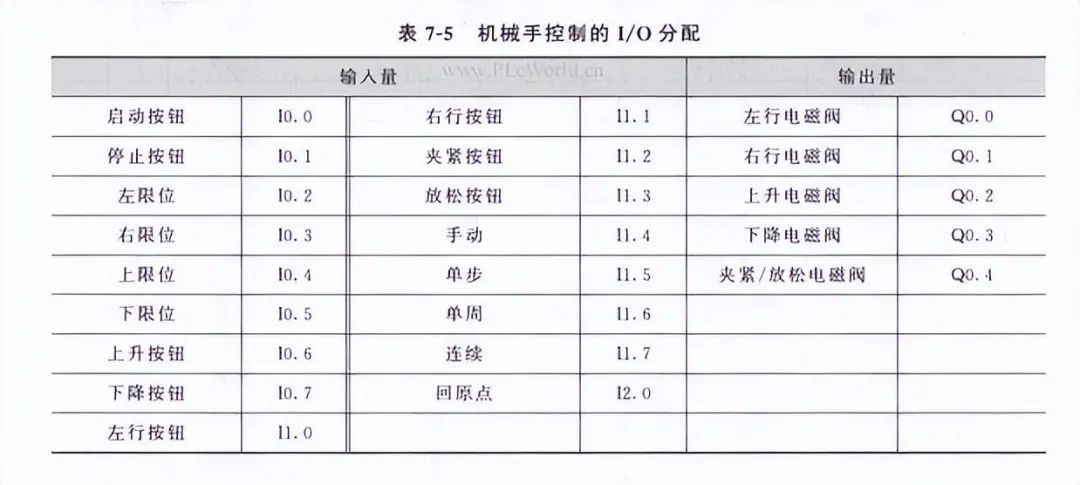
PLC控制系统的输入信号有17个,均为开关量。其中操作按钮开关有8个,限位开关有4个,选择开关有1个(占5个输入点);PLC控制系统输出信号有5个,各个动作由直流24V电磁阀控制;本控制系统采用S7-200SMART PLC完全可以,且有一定裕量。
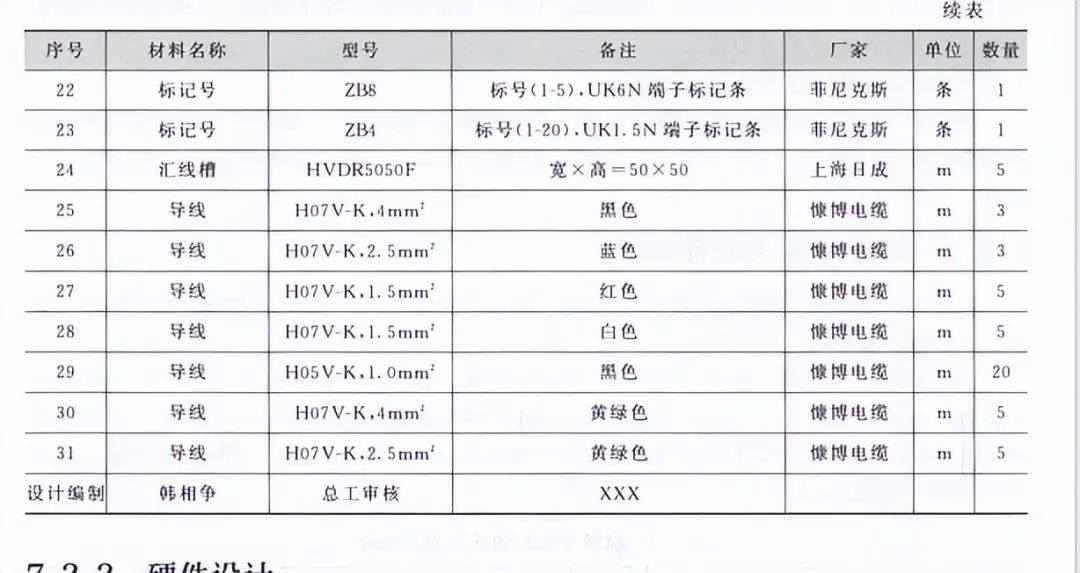
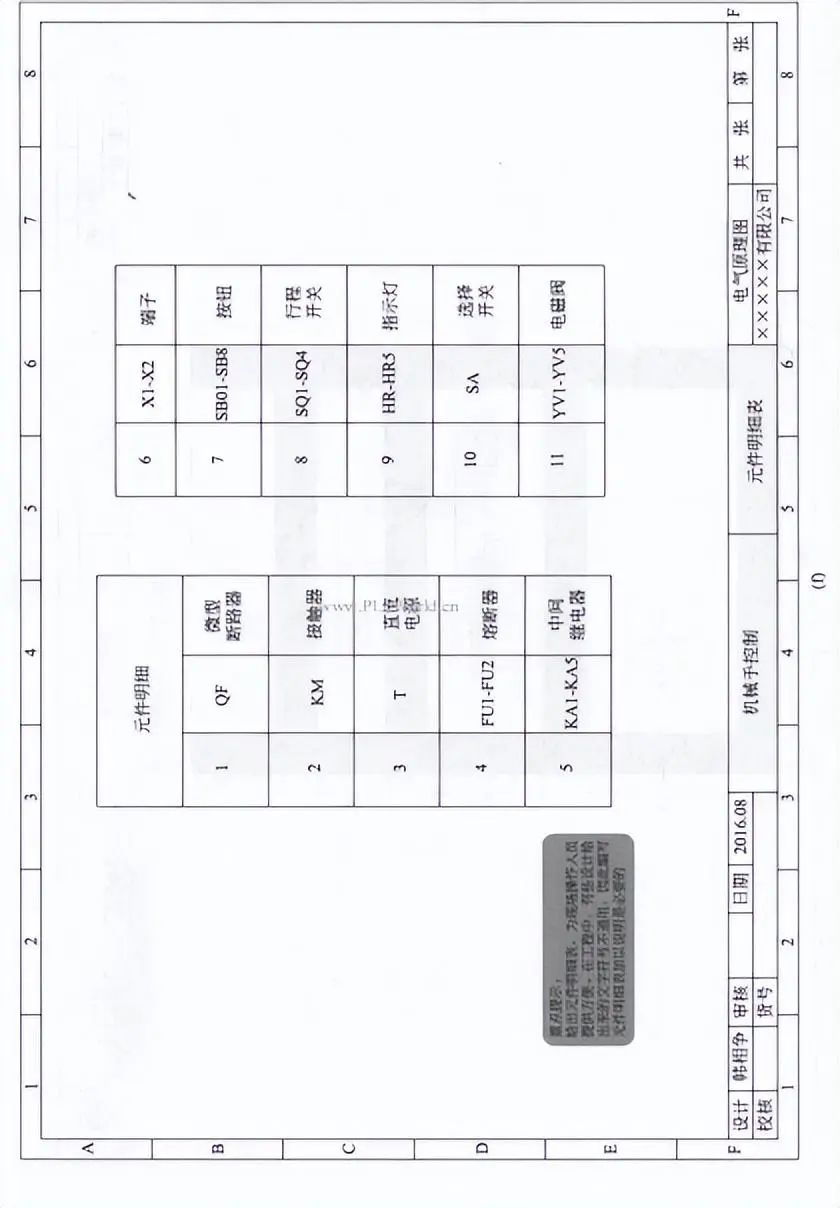
元件材料清单
如表7-4所示

PART 04 硬件设计
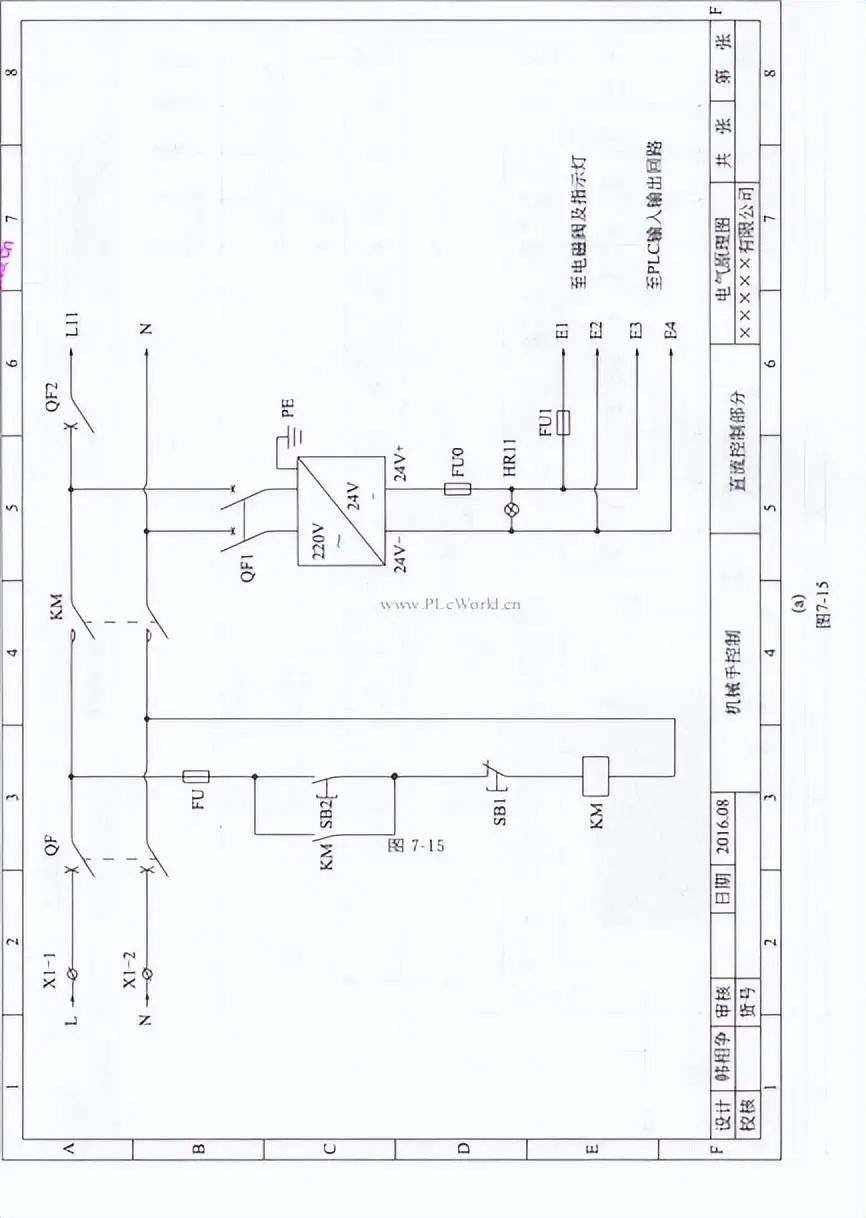
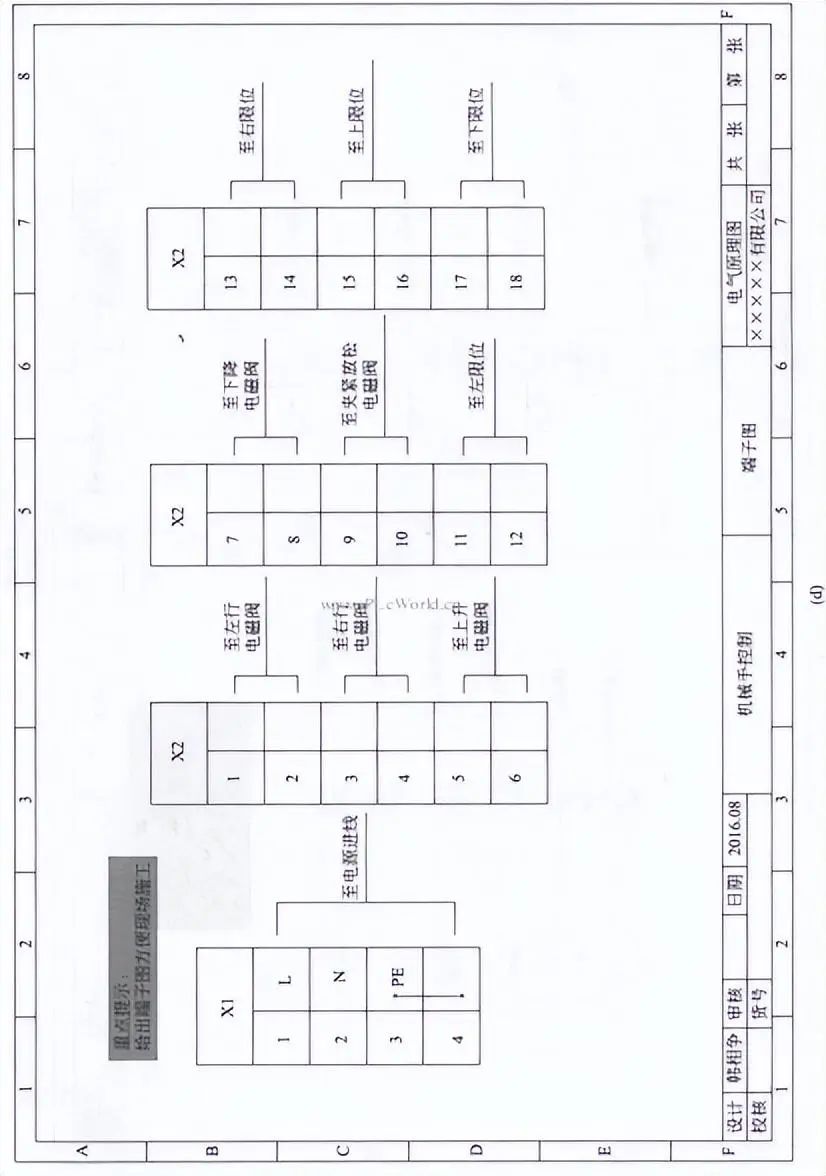
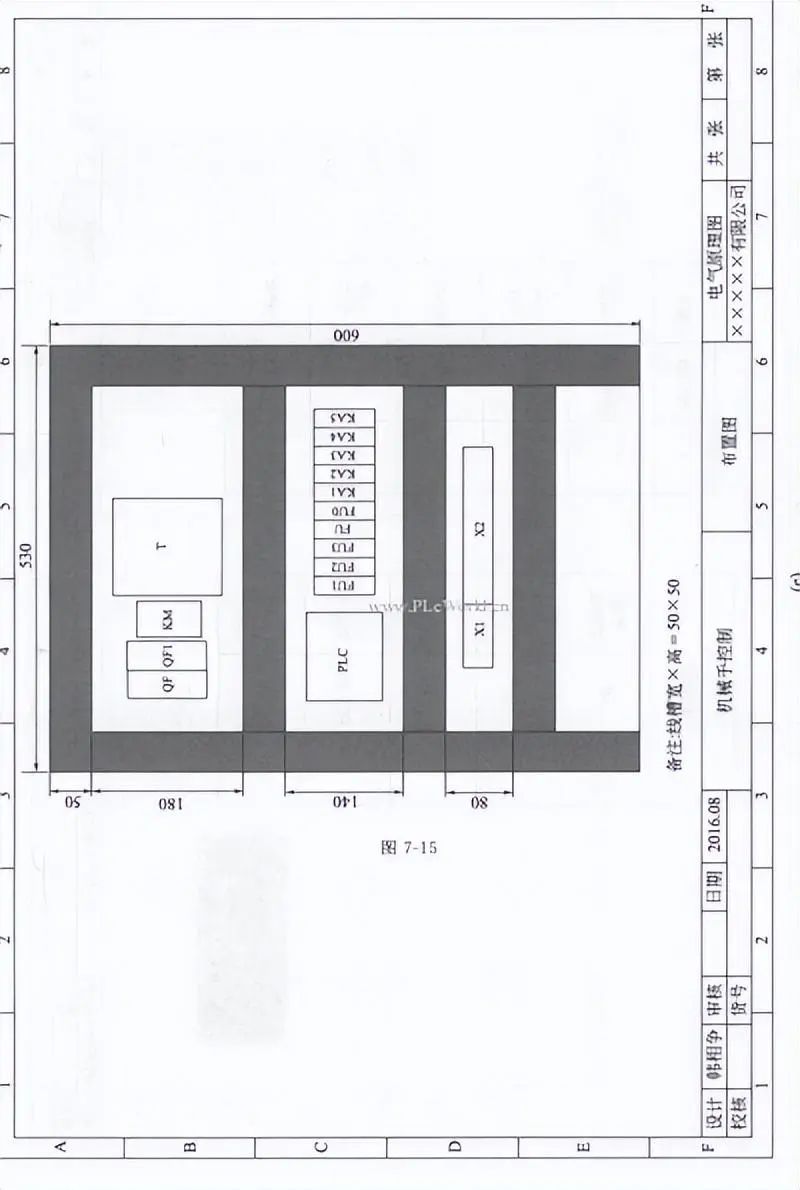
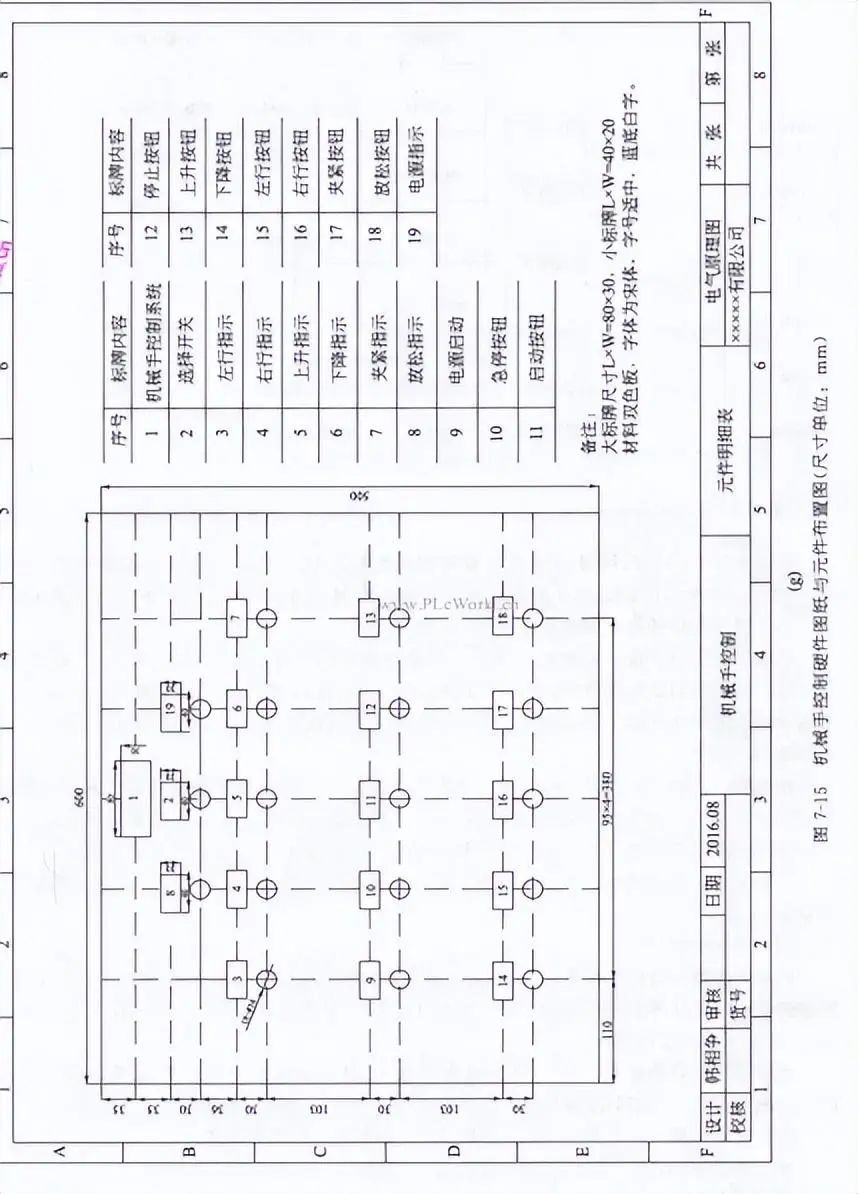
机械手控制的I/O分配,如表7-5所示。硬件设计的主回路、控制回路、PLC输入输出
回路、操作台开孔图纸,如图7-15所示。操作台壳体可参考组合机床系统壳体图,这里省略。
a
b
c
d
e
f
重点提示:给出元件明细表。为现场操作人员提供方便。在工程中,有些设计给出来的文字符号不通用,因此编写元件明姻表加以说明是必要的。
g
给出元件明细表。为现场操作人员提供方便。在工程中,有些设计给出来的文字符号不通用,因此编写元件明姻表加以说明是必要的
PART 05 程序设计
机械手控制主程序如图7-16所示,当对应条件满足时,系统将执行相应的子程序。子程序主要包括公共程序、手动程序、自动程序和回原点程序4大部分。
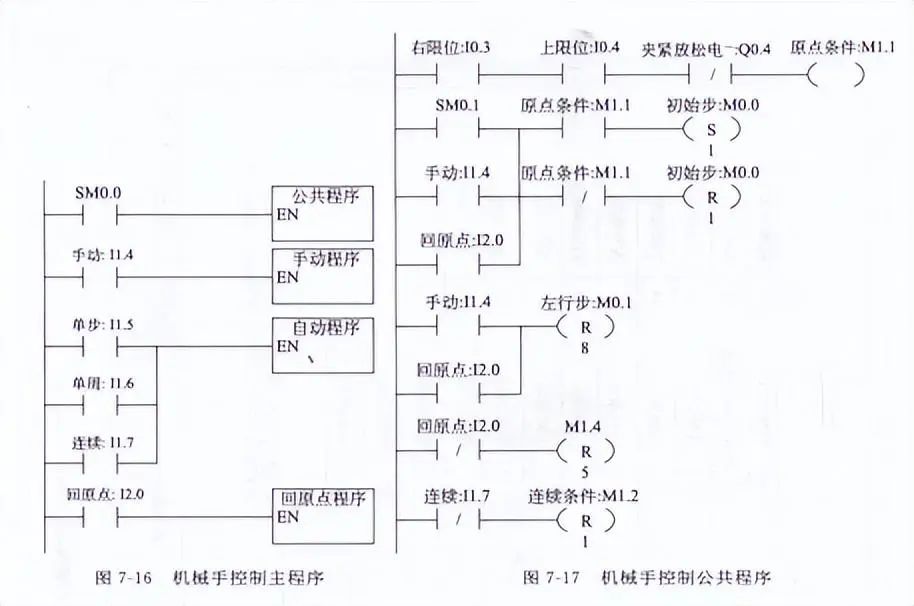
(1)公共程序
机械手控制公共程序如图7-17所示。公共程序用于处理各种工作方式都需要执行的任务,以及不同工作方式之间互相切换的处理。公共程序的编写通常要考虑原点条件、初始状态、复位非初始步、复位回原点步和复位连续标志位5个部分。机械手处于最上面和最右面且夹紧装置放松时为原点状态,因此原点条件由上限位10.4的常开触点、右限位I0.3的常开触点和表示机械手放松Q0.4常闭触点的串联电路组成,当串联电路接通时,辅助继电器M1.1变为ON。机械手在原点位置,系统处于手动、回原点或初始化状态时,初始步M0.0都会被置位,此时为执行自动程序做好准备;若此时M1.1为OFF,则M0.0会被复位,初始步变为不活动步,即使此时按下启动按钮,自动程序也不会转换到下一步,因此禁止了自动工作方式的运行。
当手动、自动、回原点3种工作方式相互切换时,自动程序可能会有两步被同时激活,为了防止误动作,因此在手动或回原点状态下,辅助继电器M0.1~M1.0要被复位。在非回原点工作方式下,12.0常闭触点闭合,辅助继电器M1.4~M2.0被复位。在非连续工作方式下,11.7常闭触点闭合,辅助继电器M1.2被复位,系统不能执行连续程序。
(2)手动程序
机械手控制手动程序如图7-18所示。当按下左行启动按钮(I1.0常开触点闭合),且上
限位被压合(I0.4常开触点闭合)时,机械手左行;当碰到左限位时,常闭触点I0.2断开,
Q0.0线圈失电,左行停止。
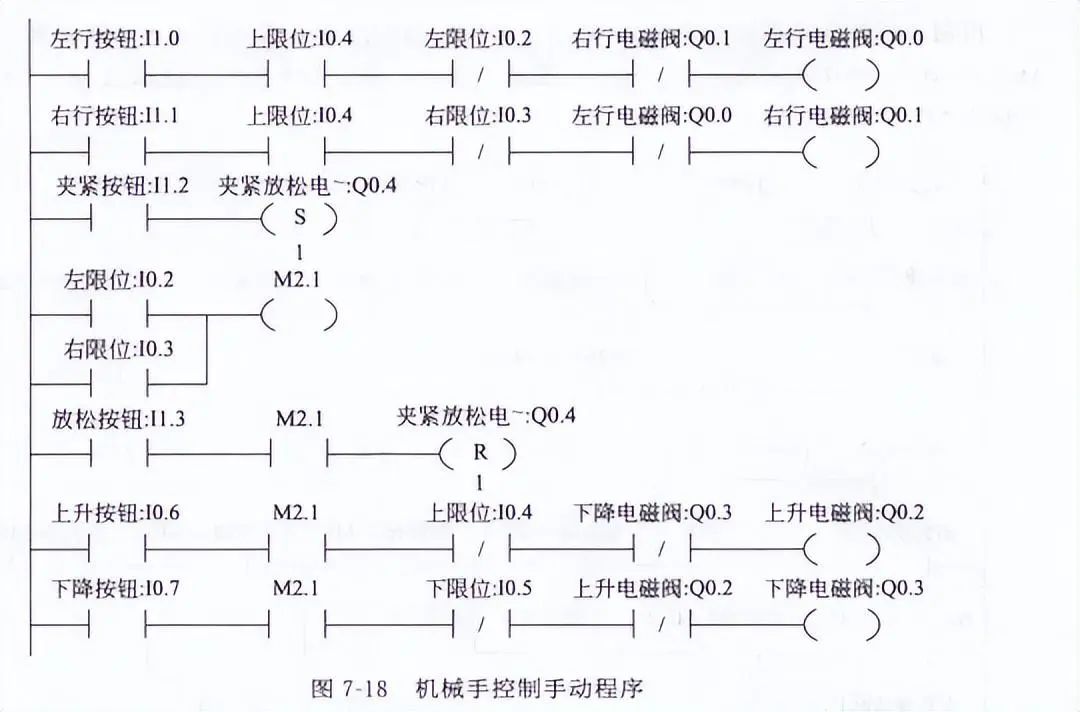
当按下右行启动按钮(11.1常开触点闭合),且上限位被压合(I0.4常开触点闭合)
时,机械手右行;当碰到右限位时,常闭触点I0.3断开,Q0.1线圈失电,右行停止。
按下夹紧按钮,I1.2变为ON,线圈Q0.4被置位,机械手夹紧。
按下放松按钮,I1.3变为ON,线圈Q0.4被复位,机械手将工件放松。
当按下上升启动按钮(I0.6常开触点闭合),且左限位或右限位被压合(I0.2或I0.3常开触点闭合)时,机械手上升;当碰到上限位时,常闭触点I0.4断开,Q0.2线圈失电,上升停止。当按下下降启动按钮(I0.7常开触点闭合),且左限位或右限位被压合(I0.2或10.3常开触点闭合)时,机械手下降;当碰到下限位时,常闭触点I0.5断开,Q0.3线圈失电,下降停止。
在手动程序编写时,需要注意以下几个方面。
①为了防止方向相反的两个动作同时被执行,手动程序设置了必要的互锁。
②为了防止机械手在最低位置与其他物体碰撞,在左右行电路中串联上限位常开触点加以限制。只有在最左端或最右端机械手才允许上升、下降和放松,因此设置了中间环节加以限制。
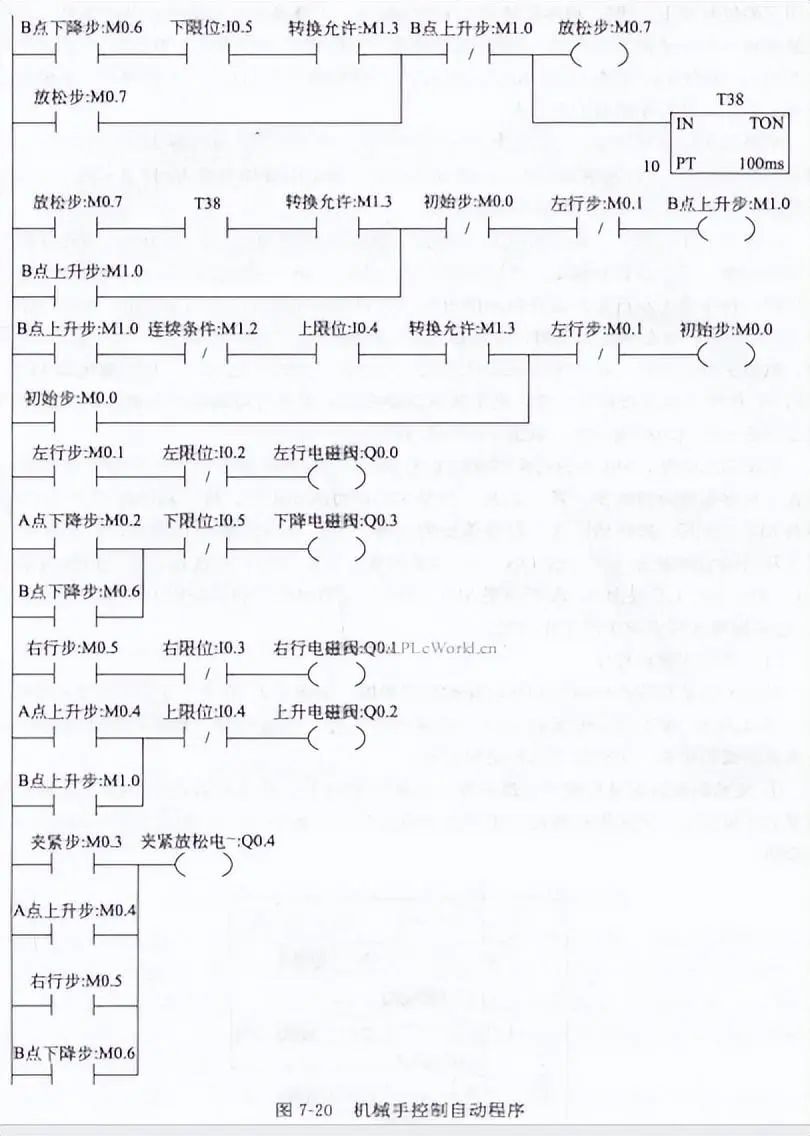
(3)自动程序
机械手控制自动程序顺序功能图如图7-19所示,根据工作流程的要求,显然1个工作周期有“左行→下降→夹紧→上升→右行→下降→放松→上升”这8步,再加上初始步,因此共9步(从M0.0~M1.0);在M1.0后应设置分支,考虑到单周和连续的工作方式,以一条分支转换到初始步,另一分支转换到M0.1步。需要说明的是,在画分支的有向连线时一定要画在原转换之下,即要标在M1.1(SM0.1+I1.4+I2.0)的转换和I0.0·M1.1的转换之下,这是绘制顺序功能图时要注意的。
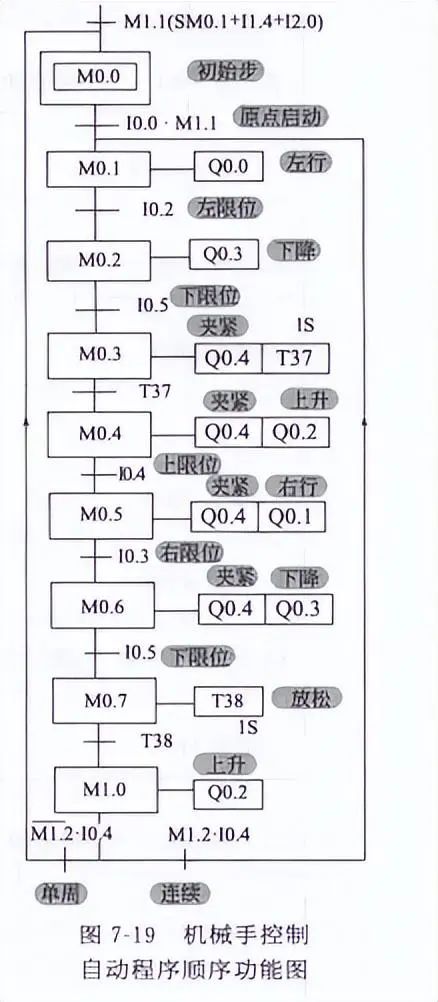
自动程序时,采用启保停电路编程法,其中M0.0~M1.0为中间编程元件,连续、单周、单步3种工作方式用连续标志M1.2和转换允许标志M1.3加以区别。
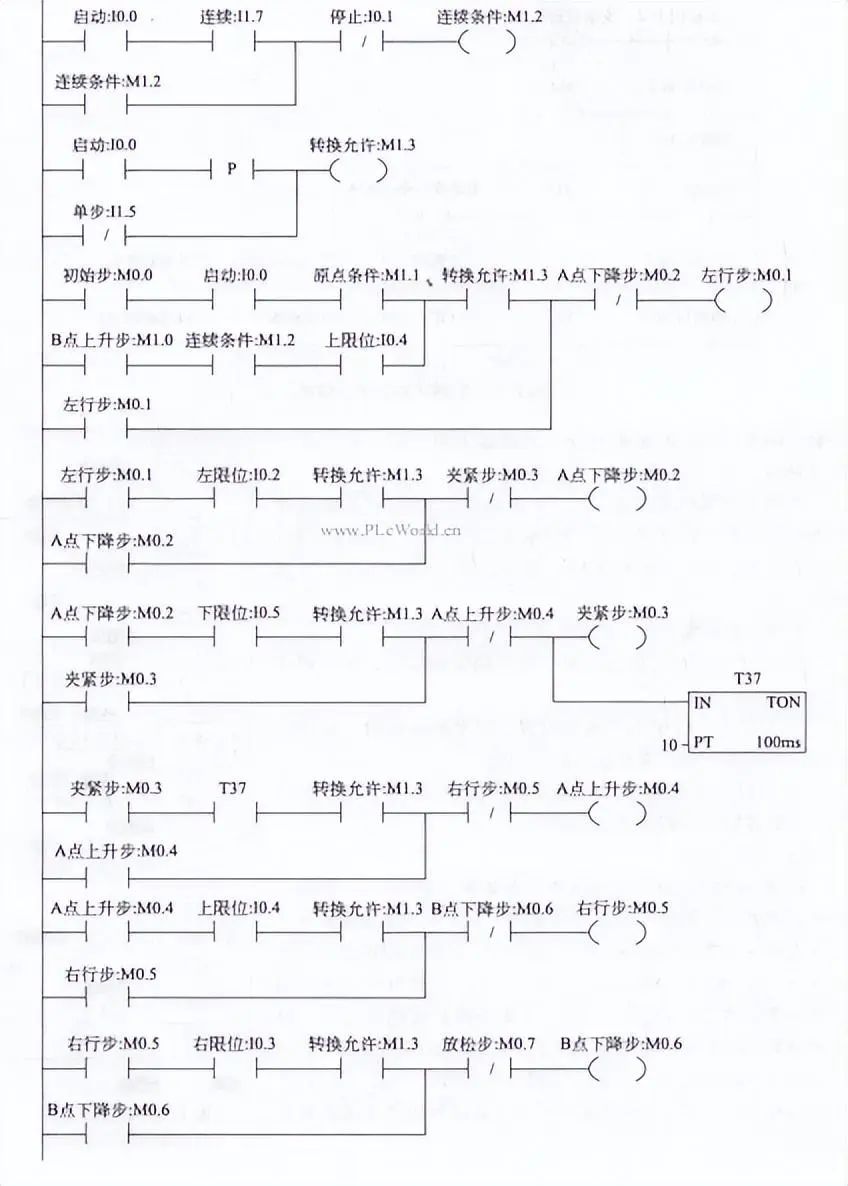
在连续工作方式下,常开触点I1.7闭合,此时处于非单步状态,常闭触点I1.5为ON,线圈M1.3接通,允许转换;若原点条件满足,在初始步为活动步时,按下启动按钮I0.0,线圈M0.1得电并自锁,程序进入左行步,线圈Q0.0接通,机械手左行;当碰到左限位开关I0.2时,程序转换下降步M0.2,左行步M0.1停止,线圈Q0.3接通,机械手下降;当碰到下限位开关I0.5时,程序转换到夹紧步M0.3,下降步M0.2停止;以此类推,以后系统就这样一步一步地工作下去。需要指出的是,当机械手在步M1.0返回时,上限位I0.4状态为1,因为先前连续标志位M1.2状态为1,故转换条件M1.2·I0.4满足,系统将返回到M0.1步,反复连续地工作下去。
单周与连续原理相似,不同之处在于在单周的工作方式下,连续标志条件不满足(即线圈M1.2不得电),当程序执行到上升步M1.0时,满足的转换条件为M1.2·I0.4,因此系统将返回到初始步M0.0,机械手停止运动。在单步工作方式下,常闭触点I1.5断开,辅助继电器M1.3变为OFF,不允许步与步之间的转换。当原点条件满足,在初始步为活动步时,按下启动按钮I0.0,线圈M0.1得电并自锁,程序进入左行步;松开启动按钮I0.0,辅助继电器M1.3马上失电。在左行步,线圈Q0.0得电,当左限位压合时,与线圈Q0.0串联的I0.2的常闭触点断开,线圈Q0.0失电,机械手停止左行。I0.2常开触点闭合后,如不按下启动按钮I0.0,辅助继电器M1.3状态为0,程序不会跳转到下一步,直至按下启动按钮,程序方可跳转到下降步;此后在某步完成后必须按启动按钮一次,系统才能转换到下一步。
需要指出的是,M0.0的启保停电路放在M0.1启保停电路之后的目的是,防止在单步方式下程序连续跳转两步。若不如此,当步M1.0为活动步时,按下启动按钮I0.0,M0.0步与M0.1步同时被激活,这不符合单步的工作方式;此外转换允许步中,启动按钮I0.0用上升沿的目的是使M1.3仅ON一个扫描周期,它使M0.0接通后,下一扫描周期处理M0.1时,M1.3已经为0,故不会使M0.1为1,只有当按下启动按钮I0.0时,M0.1才为1,这样处理才符合单步的工作方式。
(4)自动回原点程序
机械手自动回原点程序及顺序功能图和梯形图,如图7-21所示。在回原点工作方式下,I2.0状态为1。按下启动按钮I0.0时,机械手可能处于任意位置,根据机械手所处的位置及夹紧装置的状态,可分以下几种情况讨论。
1.夹紧装置放松且机械手在最右端:夹紧装置处于放松且在最右端,所以直接上升返回原点位置即可。对应的程序为,按下启动按钮I0.0,条件I0.0.Q0.4·10.3满足,M2.0步接通。
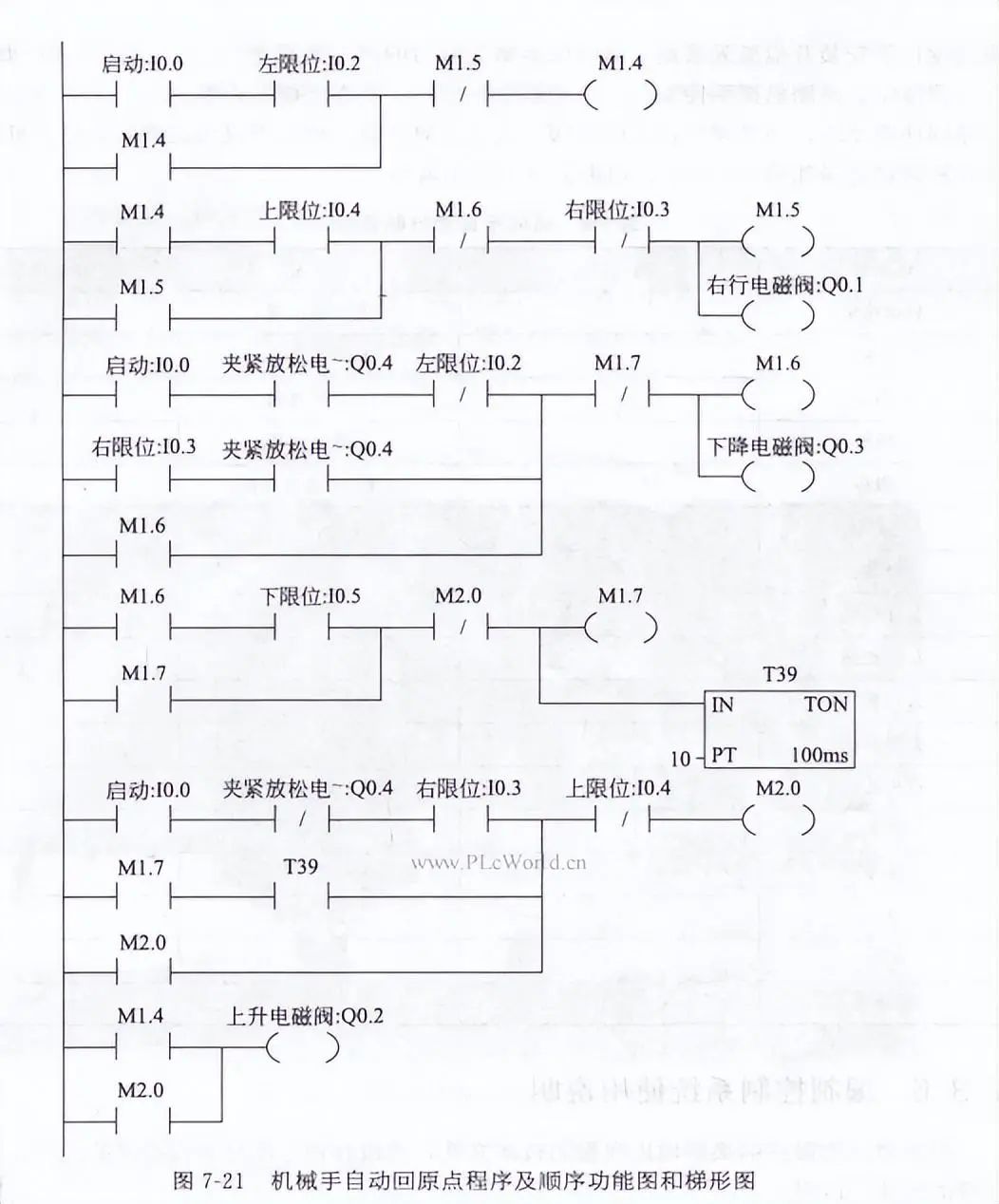
2.机械手在最左端:机械手在最左端夹紧装置可能处于放松状态,也可能处于夹紧状态。若处于夹紧状态时,按下启动按钮I0.0,条件I0.0.10.2满足,因此依次执行M1.4~M2.0步程序,直至返回原点;若处于放松状态,按下启动按钮I0.0,只执行M1.4~M1.5步程序,下降步M1.6以后不会执行,原因在于下降步M1.6的激活条件10.3.Q0.4不满足,并且当机械手碰到右限位I0.3时,M1.5步停止。
3.夹紧装置夹紧且不在最左端:按下启动按钮I0.0,条件I0.0.Q0.4·I0.2满足,因此依次执行M1.6~M2.0步程序,直至回到原点。
审核编辑:黄飞
-
PLC控制机械手设计2008-12-13 2972
-
基于PLC控制系统的平面喷涂机械手2009-05-15 1013
-
基于 CAN 总线的机械手控制系统The Control S2009-06-03 633
-
PLC在机械手控制系统上的应用2009-06-17 10802
-
基于PLC的机械手控制设计(毕业设计)2015-11-13 2638
-
PLC数控机床上料机械手控制系统设计2018-02-06 2896
-
西门子PLC S7-200smart程序下载错误分析2018-07-23 6756
-
西门子S7-200SMART接入BL102 PLC网关2021-10-28 3040
-
PLC网关采集西门子S7-200SMART数据配置流程2021-11-04 4952
-
西门子s7-200smart与s7-1200PLC通信技术2022-11-17 10895
-
西门子S7-200Smart如何转换Modbus2021-11-03 6492
-
如何实现 S7-200smart系列PLC的本地数采及云端数采?2022-10-12 2607
-
西门子S7-1200与S7-200SMART进行PN通信!2023-07-10 7681
-
PLC西门子S7-200smart和S7-1200的区别?2023-11-17 18417
-
PLC在机械手控制系统中的具体应用2024-06-17 4103
全部0条评论

快来发表一下你的评论吧 !
