

iCAN2023:应用TDK产品的优秀项目展示③:盲区侦测和安防系统
描述
TDK作为iCAN大赛的合作伙伴,
本次为参赛选手们免费提供四种产品
用于作品创作研发。
以下为大家介绍2例
使用TDK产品的优秀项目的内容!
学校:山东交通学院
成员:秦笑、李海锦、李宜达、赵淑同、熊梓姗
在国省道、县乡道路,存在大量的地形复杂,路窄、弯道多、坡陡,还有部分道路穿过村庄,易造成驾驶员视线遮挡,交通状况复杂,主路驶过的车辆与支路车辆、行人碰撞事故很多。存在道路交通安全隐患,虽然事故多发路段设立了多种多样的提示标语与警示标志,像常规的广角镜、标志牌等,但效果还是不够理想,针对急转弯、陡坡弯道、村庄平角路口等不利地形或复杂路段的交通安全问题,迫切需要采用智能化交通技术对道路交通进行实时动态的侦测、提示、引导,实现道路交通安全有序、保障交通参与者生命和财产安全的目标。项目主要设置在道路转角处,集醒目预警、测速测距、辅助查看功能于一体。可以主动判断转角道路对侧移动物体(行人/车辆),若转角对侧移动物体是行人(车辆),则装置上的人形(车形)警示标志会不断闪烁,显示屏显示该行人(车辆)的速度和到转角的距离等信息。另外,本项目将收集到的转角道路路况数据信息(包含装置位置、运行情况),实时上传至基于SSM的后台系统,进行算法分析更新特征向量样本集,可方便人员进行维修以及降低装置的误判率。
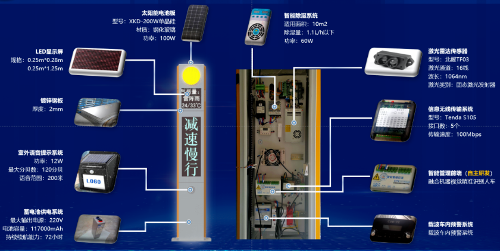
本项目集智能识别、测速测距、醒目预警、算法分析、辅助查看于一体,可以主动判断转角道路对侧移动物体(行人/车辆),若转角对侧移动物体是行人(车辆),则装置上的人形(车形)警示标志会不断闪烁,显示屏显示该行人(车辆)的速度和到转角的距离等信息。本项目可减少因障碍物遮挡视线或天气原因(如雾霾天气)造成的交通事故,主动提供出行者转弯道路对向移动物体的信息,可用于山区多弯地带、城市转弯道路、匝道、地下停车场、高档别墅区、企业工厂、旅游景点等场地。另外,可实时为地图软件提供道路转角信息,方便出行者查看。
本项目应用在道路转角处,采用主动预警的方式告知出行者转角对侧的路况信息,利用激光雷达传感器、计算机算法(如卡尔曼滤波算法、多传感器融合算法、模糊聚类算法)和后台系统对信息进行检测、分析、发布。传感器检测到的信息发送至微控制器中并进行数据处理,将处理后的有关数据发送至警示灯和LED显示屏,使之显示“人形/车形”图案、移动物体的速度和到转角的距离等信息。同时SIM868模块获取装置的GPS信息,并将数据统一打包发送至后台。项目可检测距离转角处110米处对侧是否有移动物体,并在距转角100米处开始检测并判别对向移动物体的性质和状态。
当行驶物体进入转角路段,硬件—智能检测显示系统开始检测,包括以下步骤:
步骤1:激光雷达传感器监测转角路段,通过三维成像处理技术对转角处进行三维成像;
步骤2:利用机器视觉进行人车判断,若行驶物体包含车辆,则其输出有效信号,同时进行对该车辆进行测速测距,然后进入步骤4;
步骤3:利用机器视觉进行人车判断,若行驶物体包含行人,则其输出有效信号,同时进行对该行人进行测速测距,然后进入步骤4;
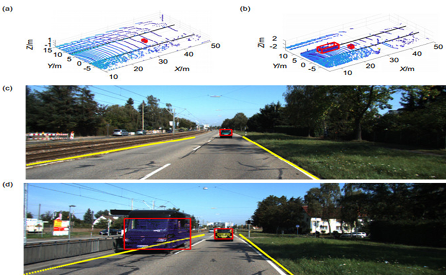
步骤4:激光雷达传感器发送相关信息至微控制器,微控制器进行数据处理,将处理后的有关数据发送至警示灯和LED显示屏,同时开启SIM868GSM /GPRS/GPS模块获取GPS信息,通过SIM868 GSM/GPRS/GPS模块的GPRS功能将检测到的信息统一打包发送至后台服务器;
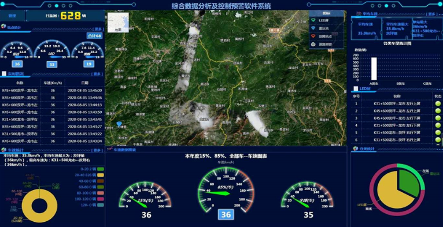
步骤5:服务器将接收到的数据分类储存,积累一定数据后,将有关信息进行模糊聚类分析,得到更加精准的特征向量区间,并且定期将该特征向量区间发送至微控制器,作为更新后的特征向量样本集,微控制器依据此样本集来进行判断,使装置判断更加准确。
项目利用先进的算法分析数据,精准识别移动物体的类别,大大降低系统误判率;
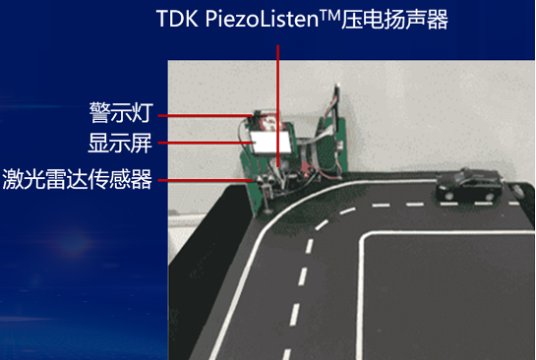
创新性地设计“人形”、“车形”警示灯,并且显示屏实时显示详细信息,主动并醒目地将提示信号提供给驾驶员,提前预警,有效降低道路转角盲区交通事故发生率;采用长寿命、高亮度的 LED 点阵屏显示会车情况,并且区分人车。
项目具有可兼容性好,抗干扰能力强等特点,项目硬件设备可以应对各种恶劣天气,正常运作于各种路况条件的弯道,软件可以在各种操作系统下正常运行。
采用TDK PiezoListen™️压电扬声器进行警示,加强了低音域的输出,轻薄,压电音质灵敏,安装容易,车辆以80km每小时的速度在距离装置 100米的位置可清晰的听到预警声音。
学校:郑州大学
成员:张家硕、杨育成、王嘉旭、周庆鑫
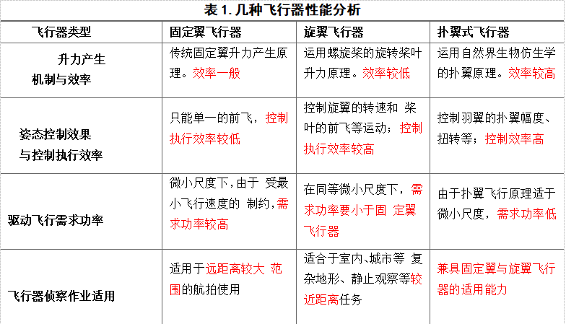
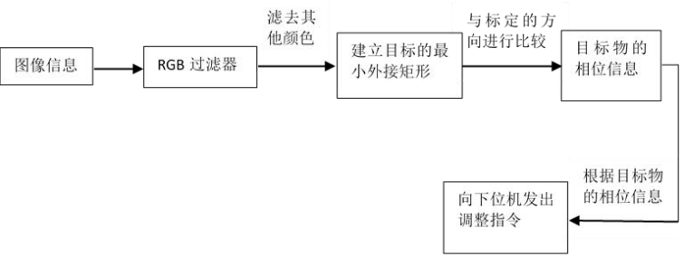
胜羽仿生无人机与传统固定翼微型飞行器及旋翼微型飞行器相比,胜羽扑翼微型飞行机器人不仅具有体积微小、隐蔽性和伪装性更高、灵活性好、可操控性好、成本低廉、便于携带,并可集群控制的特点。更重要的是可悬停功能使得扑翼微型飞行器的灵活性和可操纵性大大提高。可广泛运用于农、林、牧、渔,各种工业厂矿、电力、通信等单位的巡检、安全保障等方面。并且这款空中仿生机器人采用了基于卷积神经网络的深度学习的图像识别算法。在具体工作时,摄像头所采集的空中图像将先通过图像处理程序去除图像的噪声,然后传入已经训练好的卷积神经网络里进行处理,从而在较短的时间里识别出图片里的目标物体,进而通过图片里物体的相对位置进而传输给控制系统进行机器人工作状态的调整。
鸟类仿生扑翼式设计
与传统固定翼微型飞行器及旋翼微型飞行器相比,扑翼微型飞行机器人不仅具有体积微小、隐蔽性和伪装性更高、灵活性好、可操控性好、成本低廉、便于携带,并可集群控制的特点。更重要的是可悬停功能使得扑翼微型飞行器的灵活性和可操纵性大大提高。可广泛运用于农、林、牧、渔,各种工业厂矿、电力、通信等单位的巡检、安全保障等方面。
深度学习的图像识别算法
传统图像识别方法中特征提取主要依赖人工设计的提取器,需要有专业知识及复杂的调参过程,同时每个方法都是针对具体应用,泛化能力及鲁棒性较差,深度学习主要是数据驱动进行特征提取,根据大量样本的学习能够得到深层的、数据集特定的特征表示,其对数据集的表达更高效和准确,所提取的抽象特征鲁棒性更强,泛化能力更好,并且可以是端到端的。相对于传统方式,不需要做大量的特定领域知识的特征提取,同时可以提取到传统方式难以提取到的深层抽象特征。这是传统算法所不能比拟的。
其次传统算法在大规模的样本识别时的由于大量冗余的 proposal 生成,导致学习效率低下,容易在分类出现大量的假正样本。同时传统算法的特征描述子都是基于低级特征进行手工设计的,难以捕捉高级语义特征和复杂内容。而且检测的每个步骤是独立的,缺乏一种全局的优化方案进行控制。而深度学习则有效的避免了这些因素,相对于传统方式,深度学习不需要做大量的特定领域知识的特征提取,同时可以提取到传统方式难以提取到的深层抽象特征。在抗噪方面深度学习所得到的网络的抗噪性也较传统算法有优势。
最后,由于空中背景环境的复杂性,将极易导致依赖人工设计的提取器的传统图像识别算法识别目标时出现问题,从而导致机器无法正常的工作并完成相应的目标,而采用深度学习的图像识别算法在训练时便可以通过不同噪声环境下的样本来增强系统的抗噪能力。
扑翼结构设计
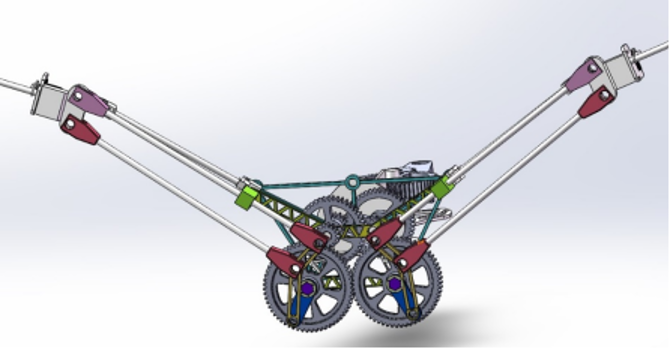
在对生物飞行方式的分析中,我们注意到,飞行生物的扑翼动作并不是单一的上下扑动,而是一种极为复杂的运动形式,其生物在运动过程中翼尖轨迹呈现出弧线形、椭圆形“8”字形等,这些运动形式可以分解为上下扑动、周向扭转和前后扫掠三自由度的合成。在此基础上进行建模分析、运动学、动力学、流体力学、motion 仿真分析、ANSYS 有限元分析;设计出图,建立控制系统,并进行样机设计。
装置组成:
执行系统(齿轮摇杆机构、机翼和尾翼)、动力系统(微型电机)、能源系统(电池)和控制系统(位姿传感器、接收机、遥控器)四部分组成。
首先,电池带动微型电机旋转,电机旋转经齿轮减速后驱动对称齿轮转动,从而带动摇杆运动,摇杆与扑翼杆相连,可以实现扑翼杆的上下扑动,扑翼杆上下扑动可以产生运动所需的升力和推力,最终实现该机器的运动。同时,电池为尾翼舵机供电,通过控制尾翼的摆动实现该机器的转动。控制系统通电后可以实现对该装置飞行位置以及姿态的检测与控制。
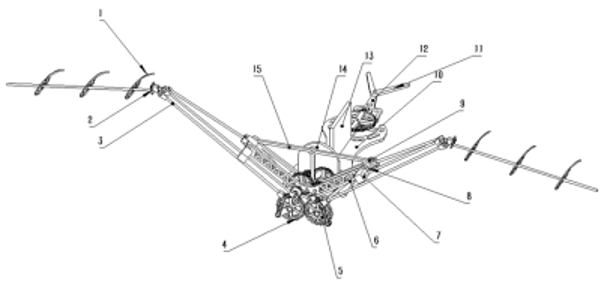
为了实现复杂的扑翼运动,我们采用多自由度曲柄摇杆机构驱动。为了能够精确控制左右翼来实现机器人的姿态变换,我们确定了左右翼独立驱动的方案。其运动过程可以简单划分为四个阶段:下扑阶段、弯曲阶段、上提阶段、展平阶段。
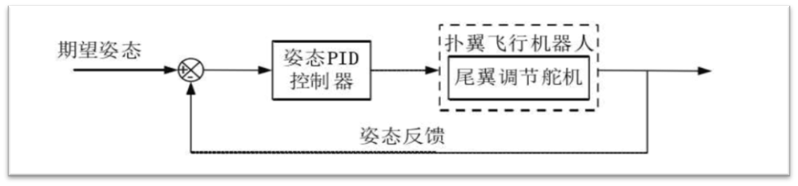
姿态控制系统:
用mpu9250陀螺仪和BMP280气压计进行实时的姿态和高度检测,运用pid控制算法进行信息处理来实时对扑翼鸟的的姿态进行控制,实现飞行旋转功能。操作手在地面通过遥控器发送信号,扑翼鸟利用NF2401 2.4G模块进行通讯无线通讯当stm32接收到无线模块发来的数据后进行CRC校验并进行解算得到pitch轴和yaw轴的期望角度,在pid的控制下精准控制襟翼的拍打频率以及尾翼的偏转方向。
图传功能:
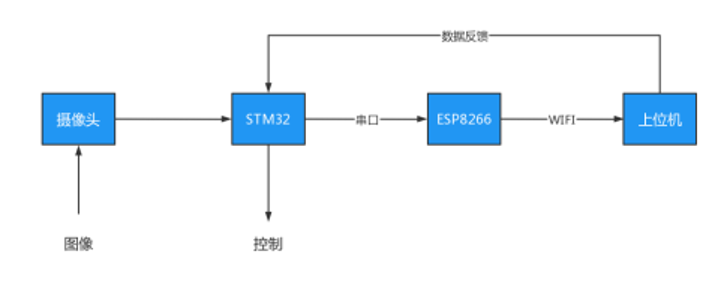
用ARM系列芯片STM32F407VET6做为发射和接收端的主控,利用OV2640模块采集现场图像,压缩成jpeg格式的图像数据。stm32通过DCMI接口获取OV2640摄像头采集到的图像数据。然后配置好ESP8266,让其连接上位机服务器。将STM32采集到的图像数据通过串口传输给ESP8266。ESP8266和上位机通过TCP/IP协议通讯,ESP8266将STM32发送过来的数据通过WIFI发送给上位机,上位机将图像数据解析为图像显示出来。
空中监测和驱鸟原理:
空中监测由控制系统、动力系统、结构及辅助系统三大部分组成。其中,控制系统主要包括主控制器、从控制器、深度计、摄像头、电机驱动器等几个部分。其中,主控制器为 Raspberry Pi,其主要用于图像信息处理,并存储六轴加速度传感器的数据;从控制器为 Pixhawk。Pixhawk 具有板载的陀螺仪、加速度计、指南针,用于感知设备的状态。它可以采集传感器信息,控制推进器、灯光、电机等且用于控制驱动,调整扑翼的摆动与转动,同时联合六轴加速度传感器与深度计数据调整电机运行保障机器的实际工作状况稳定。动力系统包括电源、扑翼,为机器人移动等各种活动提供动力。
飞行器采用了扬声器驱鸟,使用TDK PiezoListen™️压电扬声器,轻便且功能性强,仿生鸟可通过扬声器发出鸟的叫声,能够实现在机场或农田发现害鸟后发出害鸟天敌的声音,达到在农田或者机场驱赶害鸟的目的,从而保证机场的正常运行与农田的正常生产。
机械结构集成轻质:基于曲柄双摇杆结构特点,能促使机器人飞行灵活和产生更大的有效升力。
实现图传功能:利用OV2640模块采集图像数据,stm32通过DCMI接口获取摄像头采集到的图像,并通过ESP8266将数据传送给上位机,通过上位机将图像显示出来。
实现自主飞行功能:在无人控制的情况下能盘旋于空中对地面单位进行侦察,进一步简化操作难度,提高该机器人的稳定性及实用性。
太阳能供电超声波模块:根据鸟类听觉特性,安装集合太阳能充放电智能控制和变频超声波控制的一体化控制器,在满足超声驱鸟的同时,保证了太阳能供电系统的稳定工作。
TDK的压电扬声器—PiezoListen™与已有压电扬声器相比,加强了低音域的输出,使得更宽音域的输出成为可能。TDK凭借自有的积层技术和材料技术,开发出纤薄高位移压电元件,从而实现了上述功能。与一般的已有扬声器相比,PiezoListe拥有世界上最薄级别(约0.49mm)的厚度,可不受空间限制进行安装。同时,因形状灵活,可以使很多东西振动,发出声音。另外,PiezoListen也可以在低于24Vp-p的低电压下获得高声压。在4K 、8K视频内容的发展以及声音多通道化的进程中,TDK将继续为客户的应用程序设计和声音进化做出贡献。与已有压电扬声器相比,加强了低音域的输出,使得更宽音域的输出成为可能。
-
TDK连续第五年助力iCAN大学生创新创业大赛,吸引中国新人才2025-07-17 1242
-
TDK加深与iCAN大学生创新创业大赛的合作,进一步扩大产品赞助范围2024-07-03 721
-
TDK助力2023年iCAN大学生创新创业大赛取得圆满成功2024-01-15 1303
-
iCAN2023:应用TDK产品的优秀项目展示⑤:农业定位&空间监管2023-12-22 1724
-
iCAN2023:应用TDK产品的优秀项目展示④:可视化大棚和智慧物流2023-12-07 2086
-
iCAN2023:应用TDK产品的优秀项目展示①厨神帮手&乒乓球裁判2023-11-29 1697
-
TDK将以全新身份助力2023年iCAN全国大学生创新创业大赛2023-06-01 1018
-
TDK以全新身份助力2023iCAN大赛2023-05-31 1309
-
2023广州国际智能安防展览会2023-03-11 1429
-
iCAN系列产品选型指南2010-03-27 622
-
[原创]专业弱电安防培训(电视监控系统集成师、安防系统集成师、安防系统集成项目经2009-10-16 3880
-
ROCWELL安防系统产品手册2009-04-14 575
全部0条评论

快来发表一下你的评论吧 !
