

基于C2000的电机控制器设计
电子说
描述
1
电机控制器系统
在新能与汽车电机控制器中,为了保障系统安全,针对常见的故障,如过流,过压,IGBT 驱动故障等,采取实时的保护方案(一般从故障发生,到识别,并采取保护措施,需要在几百纳秒以内完成),PWM 进入对应的安全状态。
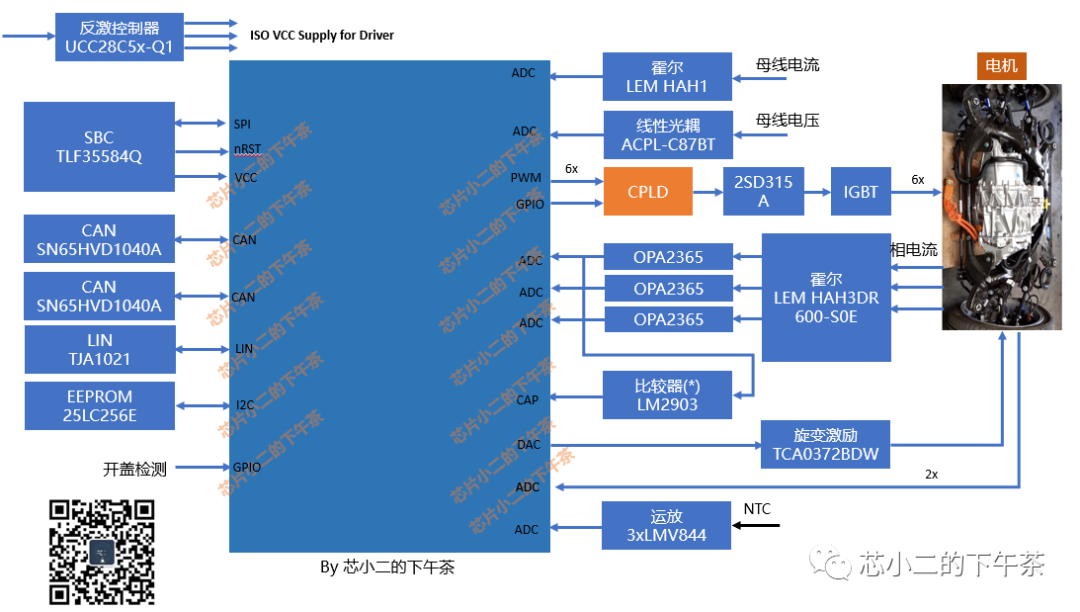
以前,控制及保护的系统典型搭配为 MCU + CPLD, 如上图;(奥迪E-Tron控制板上,采用了1片Altera的MAXII系列的CPLD芯片,1片旋变解码芯片,1片英飞凌的TriCore AURIX 32位DSP芯片,1片BOSCH的电源管理芯片;)
其中 MCU 跑电机控制算法(如FOC),系统控制和通讯等功能 ,CPLD 则用来实现不同故障下的 PWM 快速保护功能
因为CPLD独立于MCU运行,这种架构下,即使MCU发生故障,CPLD也可以第一时间识别并控制系统进入安全状态;
2
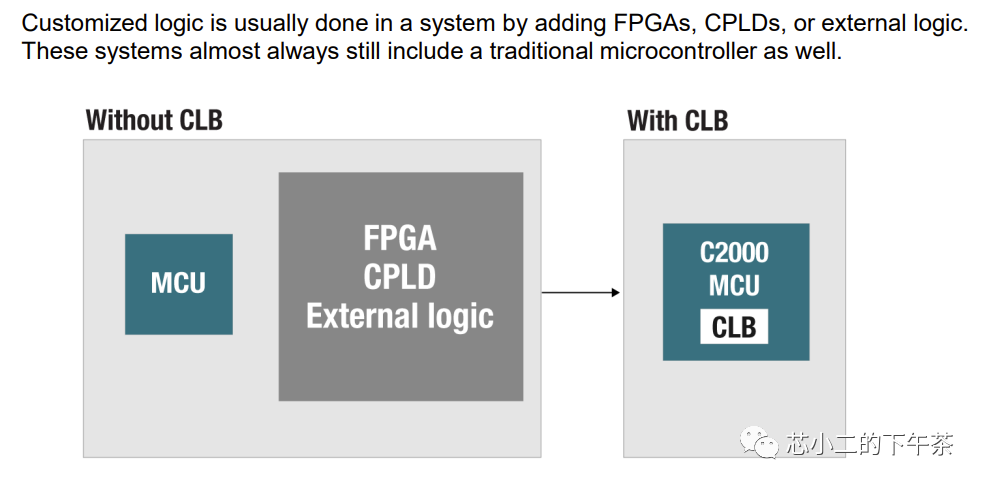
消失的CPLD
在TI针对实时控制的C2000中,有部分系列集成了一个叫CLB的模块;
该模块可以在不同的控制系统中承担不同的功能,比如替代用于监测及保护的CPLD;
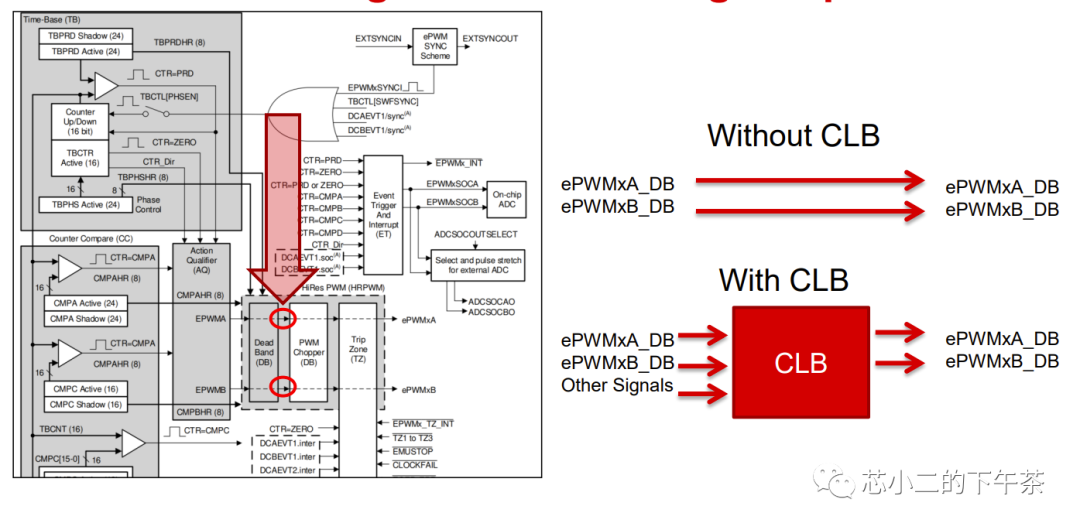
CLB,Configurable Logic Block, 内部框图如下
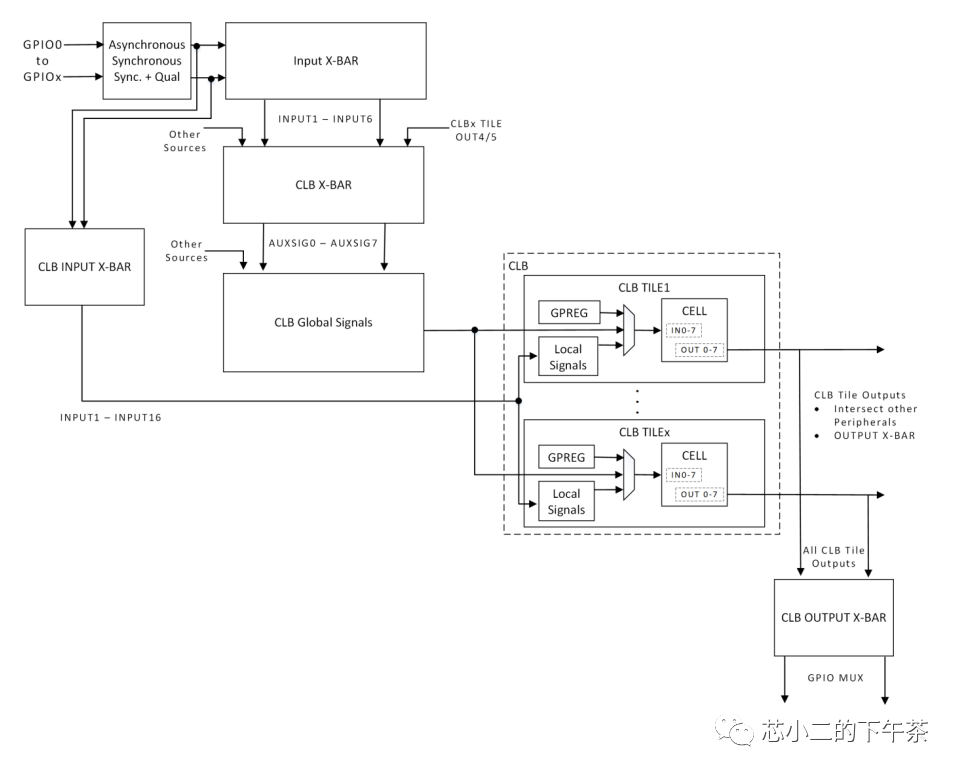
CLB是由可编程逻辑元素(Primitives),输入及输出复用开关组成,可以由CPU或者CLA通过寄存器配置;
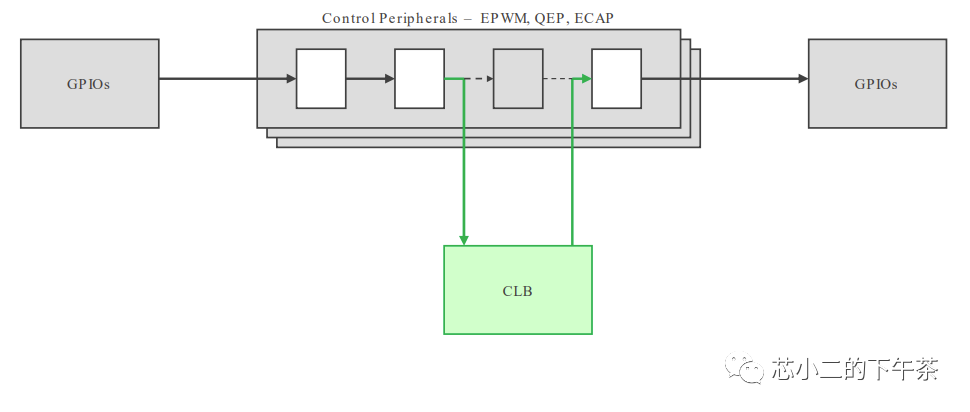
CLB的输入及输出可以与C2000内部的其他控制外设如EPWM,QEP,ECAP等相连;
如下,是基于CLB实现保护的一种具体说明,
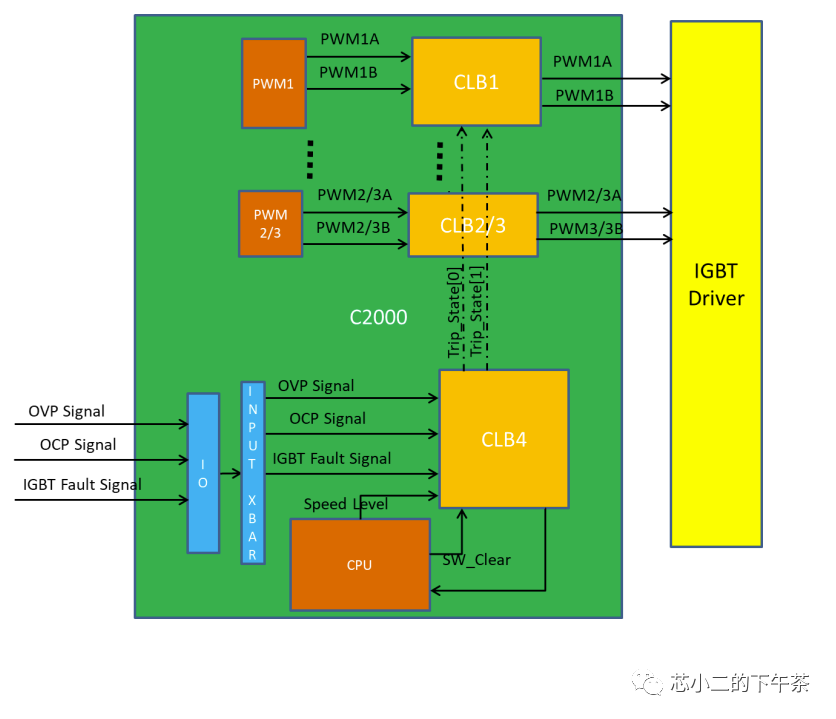
CLB 外部输入 I/O 信号:
IGBT 错误信号: 逻辑电平, 1: 表示下桥 IGBT 驱动有问题,0:表示 IGBT 驱动有问题没有问题
OCP 信号: 过流保护信号, 逻辑电平, 1: 过流信号产生, 0: 电流正常.
OVP 信号: 过压保护信号, 逻辑电平,1: 过压信号产生, 0: 电压正常.
CLB 其他输入信号:
转速范围信号: CPU 计算之后提供给 CLB,1—表示速度 > 高速门限, 0--表示速度在正常范围.
PWMxA 和 PWMxB 信号来自于 ePWMx 模块.
CLB 输出
PWMxA/ PWMxB
通过在芯片内部集成CLB,减去了原系统需要的片上CPLD,降低系统成本及设计复杂度的同时,保障了系统安全控制的需求;
审核编辑:刘清
-
C2000微控制器用户培训手册2024-12-05 478
-
C2000™实时控制微控制器(MCU)使用入门2024-11-07 592
-
C2000™微控制器的USB闪存编程2024-09-26 593
-
C2000 电机控制 SysConfig 工具应用报告2024-09-09 548
-
C2000™微控制器的串行闪存编程2024-09-03 634
-
浅谈如何评估TI C2000系列微控制器程序的堆栈使用情况2022-10-31 953
-
C2000™微控制器已用于控制各类应用中的电机超过25年2022-01-15 3225
-
TI C2000的数字电源系统的微控制器架构介绍2019-04-26 5581
-
C2000微控制器的架构介绍 (1)2019-04-19 5797
-
C2000入门:C2000的外置电路的控制介绍(6)2019-04-15 5203
-
C2000微控制器的特点及优势介绍2018-08-20 5229
-
C2000微控制器的架构特点介绍2018-08-13 5442
-
基于TI C2000™ 微控制器的分析与应用2018-06-12 5220
-
基于C2000微控制器实现数字控制可再生能源电源系统的设计与实践2017-10-13 1260
全部0条评论

快来发表一下你的评论吧 !
