

Speos SSS传感器特性与EMVA1288标准以及Lumerical传感器验证概述
电子说
描述
概述
本文是Speos Sensor System exporter(SSS)的使用指南,这是一个强大的解决方案,用于camera sensor模拟结果的后处理。本文介绍了一组实际示例,以演示该工具基于EMVA 1288标准从传感器的降阶模型生成电子图和Raw图像的能力,使得Speos SSS的核心功能及其在camera模拟应用,提供更深层次的理解。
Speos SSS工具,专为使用Speos camera模拟结果的后处理。该工具将光谱曝光/辐照度图转换为Raw图像、电子图和显影图像。从光度结果到电子图和原始图像的转换基于传感器的降阶模型,遵循EMVA 1288标准。EMVA 1288是一个行业标准规范,描述了机器视觉和成像应用的图像传感器性能。它为关键传感器参数提供标准化测试,如响应、动态范围、噪声、暗电流和量子效率。
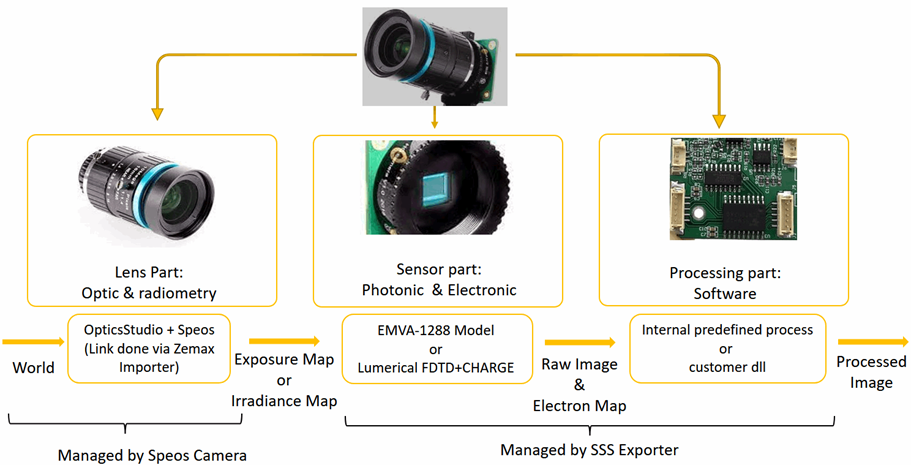
要使用SSS export,并生成Raw图像和电子图,需要有speos生成的光谱曝光图exposure map,或辐照度图Irradiance map,和EMVA 1288标准传感器数据。然后,SSS工具自动处理这些数据,以创建有关camera传感器采集的有价值的结果。为了生成电子图,SSS利用外部量子效率(EQE)数据,该数据可以从Lumerical或数据表中获得。
本文旨在展示SSS工具提供的广泛性和可能性。每个功能都使用实际示例进行演示,并放入相应的文件夹中,以便于执行运算。SSS工具没有图形用户界面,因此了解文件管理对于正确使用至关重要。
索引
为了快速找到所需的示例,下面提供了一个目录列表,以下案例的运行可根据需求寻找相应的板块。
1.集成时间vs系统增益
2.暗噪声
3.PRNU 和 DSNU
4.热噪声
5.随机扰动噪声
6.Lumerical耦合过程
在案例中并单击“启动Speos SSS.bat”文件。此操作将运行示例,生成的结果将存储在“output”文件夹中,并利用相应的“Inputs”文件夹中的数据。通常不需要修改batch文件,可以正确的调用SSS可执行文件。如果需要,可以在Speos的安装文件中找到SSS可执行文件(通常在“C:Program files ANSYS Incv232Optical ProductsViewersSSSExporter.exe”中)。注意:如果本地安装不在上述路径上,则需要在batch文件中调整位置。如果错误信息“无法连接到Virtual Photometric Lab”,需要以管理员身份运行相应版本的Virtual Photometric Lab一次。
传感器参数
传感器的参数在sensor.yaml文件中,在该文件中可以输入填写传感器参数。
1.传感器使用条件的信息,包括增益,偏移,曝光时间和温度。
2.传感器的属性信息,包括分辨率、像素大小和位深度。
3.EMVA数据,描述了与EMVA 1288模型标准相关的传感器性能,包括红外和紫外滤波器,量子效率,拜耳矩阵,系统增益,时间暗噪声,AST, DR,暗电流和空间非均匀性。注:量子效率可以是模拟的输入,例如用Ansys Lumerical计算的数据导出到json文件。
案例说明
1.Integration time vs System Gain集成时间vs系统增益
在成像场景中,无论是在低光条件下,高对比度的场景,还是需要精细细节的情况下,在传感器增益和曝光时间之间找到适当的平衡是至关重要的。这种平衡可以帮助实现最佳的图像质量,减少噪点,并准确地表示场景的动态范围。通过模拟不同的条件和场景,SSS能够分析传感器增益和曝光时间对图像质量的影响,包括有和没有暗噪声。
传感器增益放大捕获的信号,使图像变亮,但它也可能放大噪声,降低图像质量。同样,更长的曝光时间可以让更多的光线到达传感器,从而产生更亮的图像。然而,较长的曝光会导致动态场景中的运动模糊,因此需要与适当的增益设置进行仔细的平衡。
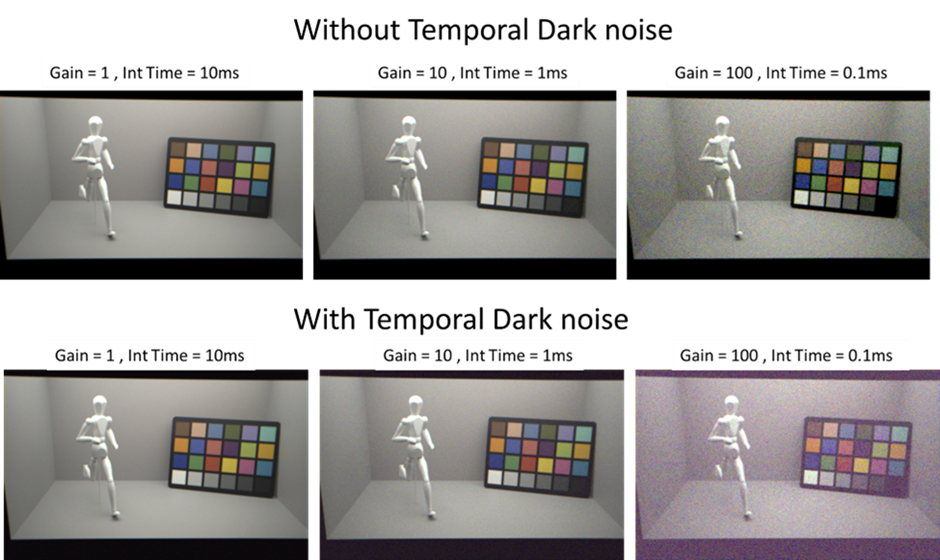
2.Temporal Dark Noise暗噪声
时间暗噪声的特征是当没有光存在时,传感器输出信号的变化通常是由电子噪声和温度波动引起的。了解时间暗噪声的影响对于评估传感器的性能和各种应用的适用性至关重要。SSS export允许使用不同曝光条件下,传感器输出中的时间暗噪声的影响,通过对传感器YAML文件中的传感器时间暗噪声进行实验,研究传感器输出中的噪声行为。录制的视频展示了不同时间暗噪声水平的显影图像结果。
3.PRNU 和 DSNU
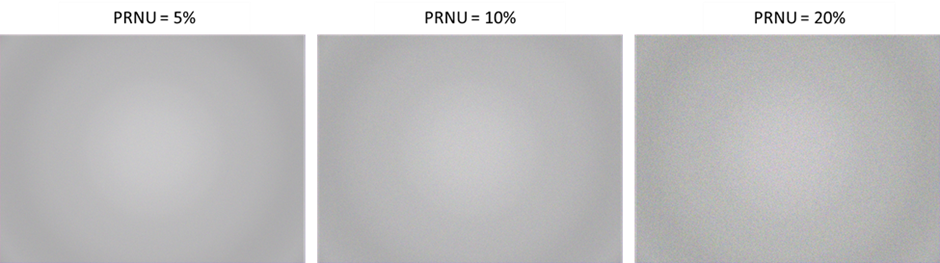
在图像传感器特性的背景下,到目前为止讨论的大多数参数,都集中在单个像素或它们的平均行为上。但是,必须认识到像素数组的参数可以从一个像素变化到另一个像素。对于线性传感器来说,光响应不均匀性(PRNU)和暗信号不均匀性(DSNU) 对图像质量起着至关重要的作用。这些变化可以引入像素灵敏度和暗信号水平的不均匀性,导致图像中不必要的噪声和伪影。SSS提供了实验和校准传感器特性的能力,如PRNU和DSNU。通过将EMVA相关数据合并到其模拟中,探索这些不均匀性对图像质量的影响。
PRNU是指图像传感器像素间的灵敏度变化,在相同的入射光强度下,会导致像素响应的微小差异。如本例所示,PRNU的校准可以对纠正这些灵敏度变化产生影响,从而获得更准确和一致的像素响应。
DSNU是指当没有光入射到传感器上时,图像传感器中各个像素之间暗信号水平的变化。如下所示校准DSNU对于消除不需要的暗信号变化是有用的。这种校准有助于确保图像数据的准确性和可靠性,特别是在具有挑战性的照明场景中。
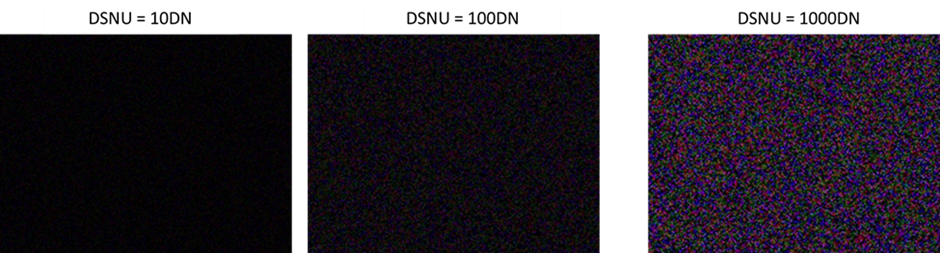
SSS export提供了探索光响应非均匀性和暗信号非均匀性的能力,增强了不同成像应用的图像质量。
4.Thermal Noise热噪声
理解和量化热噪声对camera传感器的特性和性能评估至关重要。这种噪声的产生是由于存在于传感器组件中的热能,导致信号水平的随机波动。在低光或高增益场景下,传感器中的这种固有噪声现象会严重影响图像质量,导致信噪比(SNR)降低,影响图像的整体清晰度。在需要高灵敏度和高精度的应用中,最小化热噪声是必不可少的。
SSS export提供了根据EMVA数据对传感器热噪声进行验证的功能。通过将热噪声模型纳入模拟,SSS在不同的操作条件下评估和评估传感器的热噪声性能。
5.Statistical noise随机扰动噪声
随机噪声是为了突出SSS光子噪声而增加的参数。它被集成在工具中,可以在Speos map的均匀区域上给出更准确的结果,因为真正的传感器很少能在多个像素上测量相同数量的光子。原始图是只包含同质区域的曝光图。输出是XMP格式的Raw图。可以看到面积不再是均匀的。
6.Lumerical耦合
SSS最初是基于EMVA1288标准生成传感器图像,用于表征传感器图像。然而,该标准对传感器做了一个主要假设,即量子效率仅与波长有关,并且在传感器区域内均匀。对于许多传感器来说,这可能不是真的。实际上,像素的量子效率通常取决于光入射,而光入射在传感器的每个像素上并不相同。因此,实际量子效率可以看作是波长和光入射(或在像素矩阵上的位置)的函数。这种先进的量子效率可以通过Ansys Lumerical计算出来。可以使用它来精确地设计像素矩阵,并将量子效率导出为JSON文件。
SSS将读取这个JSON文件作为输入,它将用于替换EMVA1288标准输入。Lumerical文件有两种可用的模式
模式一,QE作为光入射的函数,这种模式仅限于具有旋转轴的透镜系统。在JSON文件中,QE被定义为一个3D矩阵:入射vs波长vs拜耳矩阵。如例,2单色变化2种基本的颜色变化
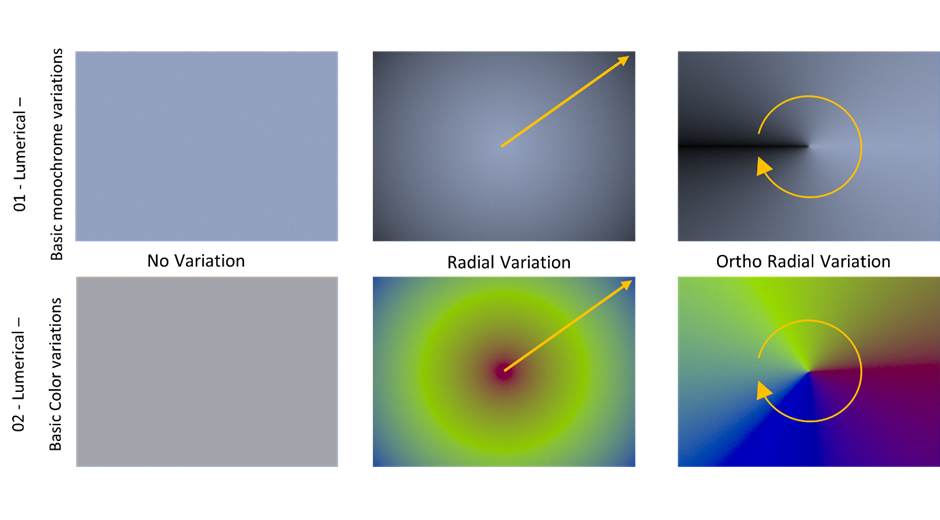
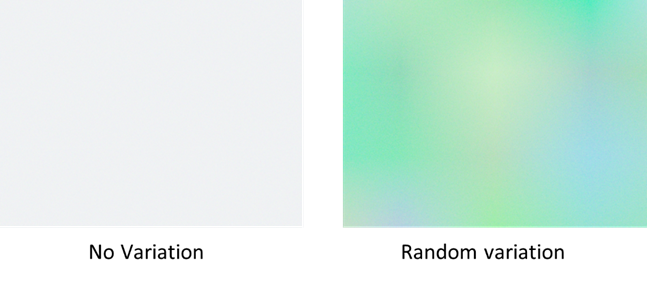
模式二,QE作为传感器的函数,此模式可用于任何镜头系统。在JSON文件中,QE被定义为一个3D矩阵:像素位置vs波长vs拜耳矩阵。数值模式2的例子,随机颜色变化。
通过这些例子可以看出,Lumerical仿真可以给出更先进、更准确的结果。
结论
本文介绍了Speos Sensor System export功能,用于在Speos中对camera模拟结果进行后期处理。本文展示了基于传感器的降阶模型创建电子图和Raw图像的实际示例,与EMVA 1288标准保持一致,涵盖集成时间、噪声、耦合等,生成的结果存储在特定文件夹中。此外,lumerical也将为SSS的后处理,提供更准确的结果。
审核编辑:刘清
-
指纹传感器的定义 指纹传感器的应用2024-03-05 5462
-
什么是惯性传感器以及校验标准2023-06-09 4718
-
机器视觉传感器评测2022-06-10 2922
-
光敏传感器概述2021-07-16 2222
-
传感器的特性,传感器有哪些设计要点?2021-03-15 2341
-
基于物理特性的智能驾驶传感器高精度仿真2020-12-15 3400
-
传感器的特性2017-12-12 2966
-
传感器有哪些特性_传感器误差分析2017-08-14 13332
-
传感器的基本特性2016-07-01 746
-
传感器的静态特性和动态特性2016-04-26 4472
-
传感器的特性简介2009-11-23 881
-
传感器标准2009-11-07 2055
-
振动与冲击传感器特性规范2009-07-03 758
-
传感器的基本特性概述2008-06-04 9166
全部0条评论

快来发表一下你的评论吧 !
