

linux内核中的SPI框架及SPI核心的初始化简析
描述
一、linux内核中的SPI框架
在嵌入式linux开发中,SPI是一种常见的通信方式,如下图所示:
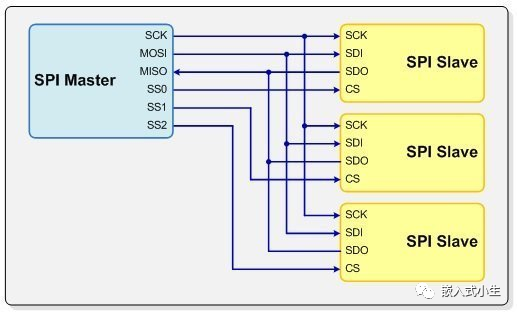
常见的属于SPI设备包括:RF芯片、智能卡、EEPROM、RTC、触摸传感器等等。
在内核中,与I2C一样,也同样提供了一个SPI框架,本文围绕这个框架展开,来分析内核提供的SPI框架是如何运作的。内核中与SPI相关的代码规范放置在/drivers/spi路径下,
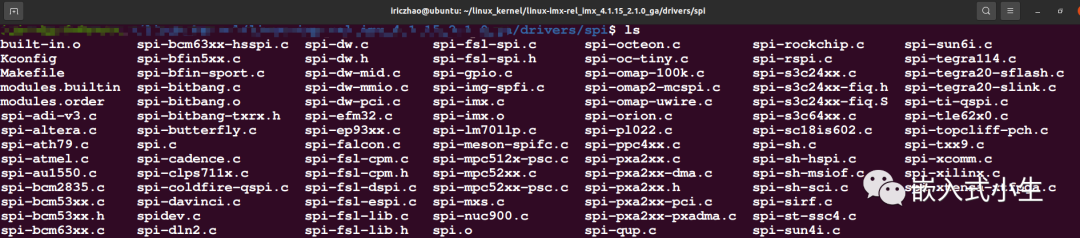
从Makefile可知,内核提供的SPI框架主要实现在spi.c、spidev.c文件中。
spi.c文件实现了spi核心的初始化,以及实现spi框架的相关API接口。(如果想让系统支持spi,此文件必须被编译)
spidev.c文件用于实现SPI设备同步用户空间接口。(该文件为可选特性)
存在/drivers/spi路径下其他洋洋洒洒的文件则是不同厂家提供的SPI控制器的驱动程序,这些文件往往由芯片厂家开发,然后合并到linux内核源码中,以适配自家芯片。
二、SPI核心的初始化
SPI核心的初始化实现在/drivers/spi/spi.c文件中,如下代码:
static int __init spi_init(void)
{
int status;
buf = kmalloc(SPI_BUFSIZ, GFP_KERNEL);
if (!buf) {
status = -ENOMEM;
goto err0;
}
status = bus_register(&spi_bus_type);
if (status < 0)
goto err1;
status = class_register(&spi_master_class);
if (status < 0)
goto err2;
if (IS_ENABLED(CONFIG_OF_DYNAMIC))
WARN_ON(of_reconfig_notifier_register(&spi_of_notifier));
return 0;
err2:
bus_unregister(&spi_bus_type);
err1:
kfree(buf);
buf = NULL;
err0:
return status;
}
/* board_info is normally registered in arch_initcall(),
* but even essential drivers wait till later
*
* REVISIT only boardinfo really needs static linking. the rest (device and
* driver registration) _could_ be dynamically linked (modular) ... costs
* include needing to have boardinfo data structures be much more public.
*/
postcore_initcall(spi_init);
在postcore_initcall()导出的spi核心的初始化过程中,主要做了以下几件事情:
1、分配一个用于SPI的buffer。
2、注册spi总线。
3、注册spi_master主机类。
以上操作是内核中面向对象的基础构件过程,spi框架也不例外,也必须这样实现,以获得内核设备驱动模型的管理。
关于spi bus总线对设备和驱动的匹配过程:在spi/spic.c文件中定义了用于描述spi的bus总线,命名为spi,该总线在spi_init()函数中注册,匹配过程由spi_match_device()描述,该函数实现如下:
static int spi_match_device(struct device *dev, struct device_driver *drv)
{
const struct spi_device *spi = to_spi_device(dev);
const struct spi_driver *sdrv = to_spi_driver(drv);
/* Check override first, and if set, only use the named driver */
if (spi->driver_override)
return strcmp(spi->driver_override, drv->name) == 0;
/* Attempt an OF style match */
if (of_driver_match_device(dev, drv))
return 1;
/* Then try ACPI */
if (acpi_driver_match_device(dev, drv))
return 1;
if (sdrv->id_table)
return !!spi_match_id(sdrv->id_table, spi->modalias);
return strcmp(spi->modalias, drv->name) == 0;
}
在上述代码中,描述了对spi设备和驱动匹配的四种方式。
三、SPI核心的数据结构
注意:几乎芯片原厂都要提供一个主机侧的SPI驱动,以支持自家的芯片。
编程接口是围绕两种驱动程序和两种设备构建。SPI控制器驱动程序抽象了控制器硬件,它可以像一组GPIO引脚一样简单,也可以像fifo一样复杂,也有可能支持DMA引擎(实现数据的最大化吞吐量)。这样的驱动程序在它们所在的总线(通常是平台总线)和SPI之间架桥,并将其设备的SPI端作为struct spi_controller公开。
SPI设备是主设备的子设备,由struct spi_device表示,并由struct spi_board_info描述符进行描述,这些描述符通常由特定板卡的初始化代码提供。
struct spi_driver称为协议驱动程序,并通过正常的驱动程序模型绑定到spi_device。
SPI的I/O模型是一组排队的消息,在协议驱动程序中可提交一个或多个struct spi_message对象,这些对象被异步处理和完成(包含同步包装器)。消息是从一个或多个struct spi_transfer对象构建,每个对象都封装了一个全双工SPI传输,在开发中需要对各种协议进行配置,因为不同的芯片采用不同的策略来使用SPI传输的数据。
1、struct spi_statistics
struct spi_statistics描述spi传输的统计信息。
该结构中放置了几个u64_stats_t类型的数据,描述统计了spi传输的统计信息,该结构实现如下:
struct spi_statistics {
struct u64_stats_sync syncp; //该参数用于保护这个结构体中的成员,在32位系统上实现per-cpu更新。
u64_stats_t messages; //处理的spi消息数。
u64_stats_t transfers; //处理的spi_transfer的数量。
u64_stats_t errors; //在spi_transfer过程中的错误数。
u64_stats_t timedout; //spi_transfer期间的timeout。
u64_stats_t spi_sync; //使用spi_sync的次数。
u64_stats_t spi_sync_immediate; //立即执行spi_sync的次数(在调用上下文时不需要排队和调度)。
u64_stats_t spi_async; //使用spi_async的次数。
u64_stats_t bytes; //传输到/从设备接收的字节数。
u64_stats_t bytes_rx; //从设备接收的字节数。
u64_stats_t bytes_tx; //发送到设备的字节数。
#define SPI_STATISTICS_HISTO_SIZE 17
u64_stats_t transfer_bytes_histo[SPI_STATISTICS_HISTO_SIZE]; //用于描述直方图的数据数组。
u64_stats_t transfers_split_maxsize; //传输数最大尺寸限制。
};
2、struct spi_delay
struct spi_delay用于描述SPI延时信息。
在linux内核中有特定的延时方法,但是spi框架基于udelay()实现了自己的延时,这个延时用于spi的数据传输,struct spi_delay实现如下:
struct spi_delay {
#define SPI_DELAY_UNIT_USECS 0
#define SPI_DELAY_UNIT_NSECS 1
#define SPI_DELAY_UNIT_SCK 2
u16 value; //延时的值。
u8 unit; //延时的单位。
};
3、struct spi_device
struct spi_device用于描述控制器端SPI从设备。
该数据结构为linux内核spi子系统的内部结构。
struct spi_device定义如下:
struct spi_device {
struct device dev; //设备的驱动模型表示。
struct spi_controller *controller; //与设备配套使用的SPI控制器。
struct spi_controller *master; //控制器的副本(用于为了实现向后兼容)。
u32 max_speed_hz; //此芯片(在此板上)使用的最大时钟速率;可能由设备的驱动程序更改。```spi_transfer.speed_hz```可以在每次传输时覆盖此设置。
u8 chip_select; //芯片选择,用于区分由控制器处理的芯片。
u8 bits_per_word; //表示数据传输涉及的字长,例如8位或12位这样的字长很常见。可以在每次传输spi_transfer.bits_per_word时重写此设置。
bool rt; //该参数用于开始是否开启实时线程优先特性。
#define SPI_NO_TX BIT(31) ;
#define SPI_NO_RX BIT(30) ;
#define SPI_TPM_HW_FLOW BIT(29) ;
#define SPI_MODE_KERNEL_MASK (~(BIT(29) - 1));
u32 mode;
int irq; //该参数可能为负值,或者传递给request_irq()以接收来自该设备的中断的数字。
void *controller_state; //控制器的运行状态。
void *controller_data; //特定于主板的控制器定义,例如FIFO初始化参数;来自于board_info.controller_data。
char modalias[SPI_NAME_SIZE]; //要与此设备一起使用的驱动程序名称,或该名称的别名。这出现在用于驱动冷插拔的sysfs的“modalias”属性中,以及用于热插拔的事件中。
const char *driver_override; //如果将驱动程序的名称写入此属性,则设备将绑定到命名的驱动程序,并且仅绑定到命名的驱动程序。
struct gpio_desc *cs_gpiod; //芯片选择线(CS)的GPIO描述符(该参数可选,如果不使用GPIO line该参数为NULL)。
struct spi_delay word_delay; //表示在传送的连续字(Word)之间插入的延迟。
struct spi_delay cs_setup; //表示在CS被断言后由控制器引入的延迟。
struct spi_delay cs_hold; //表示控制器在CS解除断言之前引入的延迟。
struct spi_delay cs_inactive; //CS解除断言后控制器引入的延时。如果在spi_transfer中使用cs_change_delay,则两个延迟将相加。
struct spi_statistics __percpu *pcpu_statistics; //表示spi_device的统计信息。
};
4、struct spi_driver
struct spi_driver用于描述主机端“协议”驱动程序。
为什么叫“协议”驱动程序,实属不易理解,这个词我是从官方文档中的描述(“protocol”)直接音译过来,因为这个结构主要用于基于spi总线协议通信的从设备。
struct spi_driver结构实现如下:
struct spi_driver {
const struct spi_device_id *id_table; //描述这个驱动程序支持的SPI设备列表。
int (*probe)(struct spi_device *spi); //用于将此驱动程序绑定到SPI设备。驱动程序可以验证设备是否实际存在,可能需要配置不需要的特征(例如bits_per_word)。用于系统启动过程中完成初始配置。
void (*remove)(struct spi_device *spi); //从SPI设备解除与这个驱动程序的绑定。
void (*shutdown)(struct spi_device *spi); //在系统状态转换期间使用的标准关机回调,如powerdown/halt和kexec。
struct device_driver driver; //SPI设备驱动程序应该初始化此结构的name和owner字段。
};
5、struct spi_controller
struct spi_controller描述到SPI主或从控制器的接口。
每个SPI控制器可以与一个或多个spi_device代表的子设备通信。这些设备通常使用4线spi总线:共享MOSI, MISO和SCK信号,但不共享芯片选择信号。每个设备可以配置为使用不同的时钟速率。
SPI控制器的驱动程序通过spi_message事务队列管理对这些设备的访问,在CPU内存和SPI从设备之间复制数据。对于它所排队的每条这样的消息,在事务完成时将调用spi_message的*complete回调函数。
struct spi_controller实现如下:
struct spi_controller {
struct device dev; //此驱动程序的设备接口。
struct list_head list; //链接到全局spi_controller列表。
s16 bus_num; //给定SPI控制器的特定板级标识符。
u16 num_chipselect; //chipselects用于区分各个SPI从机,编号从0到num_chipselects。每个从机都有一个芯片选择信号。
u16 dma_alignment; //SPI控制器对DMA缓冲区对齐的约束。
u32 mode_bits; //由控制器驱动程序解析的标志。
u32 buswidth_override_bits; //要覆盖此控制器驱动程序的标志
u32 bits_per_word_mask; //一个掩码参数,指示驱动程序支持bits_per_word的哪些值,第n位表示支持的bits_per_word为n+1
#define SPI_BPW_MASK(bits) BIT((bits) - 1);
#define SPI_BPW_RANGE_MASK(min, max) GENMASK((max) - 1, (min) - 1);
u32 min_speed_hz; //最低支持的传输速度。
u32 max_speed_hz; //最高支持的传输速度
u16 flags; //与此驱动程序相关的其他约束标志
#define SPI_CONTROLLER_HALF_DUPLEX BIT(0) ;
#define SPI_CONTROLLER_NO_RX BIT(1) ;
#define SPI_CONTROLLER_NO_TX BIT(2) ;
#define SPI_CONTROLLER_MUST_RX BIT(3) ;
#define SPI_CONTROLLER_MUST_TX BIT(4) ;
#define SPI_CONTROLLER_GPIO_SS BIT(5) ;
bool devm_allocated; //该结构体的分配是否为线程管理
union {
bool slave; //表示这是一个SPI从控制器
bool target; //表示这是一个SPI目标控制器
};
size_t (*max_transfer_size)(struct spi_device *spi); //返回spi_device的最大传输大小的回调函数;该回调函数指针可能为NULL,这时候将使用默认的SIZE_MAX。
size_t (*max_message_size)(struct spi_device *spi); //返回spi_device的最大消息大小的回函数调;该回调函数可能为NULL,这时候将使用默认的SIZE_MAX。
struct mutex io_mutex; //用于物理总线访问的互斥锁。
struct mutex add_lock; //该互斥锁用于避免将设备添加到相同的芯片选择。
spinlock_t bus_lock_spinlock; //用于SPI总线锁定的自旋锁。
struct mutex bus_lock_mutex; //该互斥锁用于排除多个调用者。
bool bus_lock_flag; //表示SPI总线为独占使用而被锁定。
int (*setup)(struct spi_device *spi); //更新设备的SPI控制器使用的设备模式和时钟记录;协议代码可以调用这个。如果请求无法识别或不支持的模式,则此操作必须失败。
int (*set_cs_timing)(struct spi_device *spi); //SPI设备请求SPI主控制器配置特定的CS设置时间,保持时间和非活动延迟的时钟计数的回调函数。该函数可选。
int (*transfer)(struct spi_device *spi, struct spi_message *mesg); //将消息添加到控制器的传输队列。
void (*cleanup)(struct spi_device *spi); //释放特定于控制器的状态
bool (*can_dma)(struct spi_controller *ctlr,struct spi_device *spi, struct spi_transfer *xfer); //判断该控制器是否支持DMA
struct device *dma_map_dev; //可以用于DMA映射的设备。
struct device *cur_rx_dma_dev; //当前用于RX DMA映射的设备。
struct device *cur_tx_dma_dev; //当前用于TX DMA映射的设备。
bool queued; //此控制器是否提供内部消息队列。
struct kthread_worker *kworker; //指向消息pump的线程结构的指针。
struct kthread_work pump_messages; //将工作安排到消息pump的工作结构。
spinlock_t queue_lock; //该自旋锁用于同步对消息队列的访问。
struct list_head queue; //消息队列。
struct spi_message *cur_msg; //当前正在传输的消息。
struct completion cur_msg_completion; //完成当前正在运行的消息。
bool cur_msg_incomplete; //内部使用标志,用于跳过cur_msg_completion。此标志用于检查驱动程序是否已经调用了spi_finalize_current_message()。
bool cur_msg_need_completion; //内部使用标志,用于跳过cur_msg_completion。此标志用于通知正在运行spi_finalize_current_message()的上下文,它需要complete()
bool busy; //用于描述消息pump是否busy。
bool running; //用于描述消息pump是否running。
bool rt; //是否将此队列设置为作为实时任务运行。
bool auto_runtime_pm; //该标志用于描述是否内核应该确保在硬件准备好时保持运行时PM的引用,使用父设备进行扩展。
bool cur_msg_mapped; //用于描述消息是否已映射为DMA。
char last_cs; //表示set_cs记录的最后一个chip_select,在非芯片选择时值为-1。
bool last_cs_mode_high;
bool fallback;
struct completion xfer_completion; //该参数由transfer_one_message()使用
size_t max_dma_len; //设备DMA传输的最大长度。
int (*prepare_transfer_hardware)(struct spi_controller *ctlr); //spi子系统请求驱动程序通过发出此调用来准备传输硬件
int (*transfer_one_message)(struct spi_controller *ctlr, struct spi_message *mesg); //spi子系统调用驱动程序来传输单个消息,同时对到达的传输进行排队。
当驱动程序处理完这个消息后,必须调用spi_finalize_current_message(),这样spi子系统才能发出下一个消息。
int (*unprepare_transfer_hardware)(struct spi_controller *ctlr); //当前队列上没有更多的消息时,spi子系统将通知驱动程序,spi子系统通过调用该回调来释放硬件。
int (*prepare_message)(struct spi_controller *ctlr, struct spi_message *message);//该回调用于设置控制器以传输单个消息,例如:进行DMA映射,该回调在线程上下文中调用。
int (*unprepare_message)(struct spi_controller *ctlr, struct spi_message *message); //撤销prepare_message()所做的所有操作。
union {
int (*slave_abort)(struct spi_controller *ctlr); //该回调用于中止SPI从控制器上正在进行的传输请求。
int (*target_abort)(struct spi_controller *ctlr); //该回调用于中止在SPI目标控制器上正在进行的传输请求
};
void (*set_cs)(struct spi_device *spi, bool enable); //设置芯片选择线(CS)的逻辑电平。可以从中断上下文调用。
//传输单个spi_transfer。如果传输完成,返回0;如果传输仍在进行中,返回1。当驱动程序完成此传输时,它必须调用spi_finalize_current_transfer(),以便子系统可以发出下一次传输。
int (*transfer_one)(struct spi_controller *ctlr, struct spi_device *spi, struct spi_transfer *transfer);
//spi子系统调用驱动程序中的该函数来处理在transfer_one_message()中发生的错误。
void (*handle_err)(struct spi_controller *ctlr, struct spi_message *message);
const struct spi_controller_mem_ops *mem_ops; //与SPI内存交互的优化/专用操作。该字段可选,只有在控制器具有内存类操作的原生支持时才应该实现。
const struct spi_controller_mem_caps *mem_caps;//处理内存操作的控制器能力。
struct gpio_desc **cs_gpiods; //用作芯片选择线的GPIO描述符数组;每个CS号码一个。对于非gpio(由SPI控制器本身驱动)的CS线,任何单个值都可能为NULL。
bool use_gpio_descriptors; //是否打开SPI核心中的代码来解析和获取GPIO描述符,此后将填充cs_gpiods,如果为芯片选择找到了GPIO线,SPI设备将分配cs_gpiods。
s8 unused_native_cs; //当使用cs_gpiods时,spi_register_controller()将用第一个未使用的原生CS填充此字段,供在使用GPIO CS时需要驱动原生CS的SPI控制器驱动程序使用。
s8 max_native_cs; //当使用cs_gpiods并填充此字段时,spi_register_controller()将根据此值验证所有原生CS(包括未使用的原生CS)。
struct spi_statistics __percpu *pcpu_statistics; //为spi_controller的统计。
struct dma_chan *dma_tx; //DMA传输通道。
struct dma_chan *dma_rx; //DMA接收通道。
void *dummy_rx; //全双工设备的虚拟接收缓冲区
void *dummy_tx; //全双工设备的虚拟传输缓冲器
int (*fw_translate_cs)(struct spi_controller *ctlr, unsigned cs); //如果引导固件使用与Linux期望编号方案不同,则可以使用这个可选回调在二者之间进行转换。
bool ptp_sts_supported; //如果驱动程序将其设置为true,则驱动程序必须在spi_transfer->ptp_sts中提供一个时间快照,尽可能接近spi_transfer->ptp_sts_word_pre和spi_transfer->ptp_sts_word_post传输的时刻。如果驱动程序没有设置这个参数,SPI核心将尽可能接近驱动程序移交的快照。
unsigned long irq_flags; //表示PTP系统时间戳期间中断使能状态。
bool queue_empty; //该参数用于表示消息队列是否为空。
bool must_async; //该参数用于表示是否关闭spi框架的所有快速路径操作。
};
struct spi_controller中的组成元素算比较多的了。
备注:在旧版的linux内核中使用struct spi_master描述SPI控制器。在较新的linux内核版本中,使用struct spi_controller替换了struct spi_master。
6、struct spi_res
struct spi_res用于描述资源管理结构,侧重于在spi_message处理期间的生命周期管理。该结构定义如下:
struct spi_res {
struct list_head entry; //资源链表项
spi_res_release_t release; //释放此资源之前调用的释放代码
unsigned long long data[]; //为特定用例分配的额外数据
};
7、struct spi_transfer
struct spi_transfer用于描述读/写缓冲对,该结构定义定义如下:
struct spi_transfer {
const void *tx_buf; //要写入的数据(DMA安全内存),该值可能为NULL。
void *rx_buf; //要读取的数据(DMA安全内存),该值可能为NULL
unsigned len; //rx和tx缓冲区的大小(字节为单位)
#define SPI_TRANS_FAIL_NO_START BIT(0);
u16 error; //SPI控制器驱动程序记录的错误状态。
dma_addr_t tx_dma; //tx_buf的DMA地址,如spi_message.is_dma_mapped。
dma_addr_t rx_dma; //rx_buf的DMA地址,如spi_message.is_dma_mapped。
struct sg_table tx_sg; //用于传输的散列表。
struct sg_table rx_sg; //用于接收的散列表;
unsigned dummy_data:1;
unsigned cs_off:1;
unsigned cs_change:1;
unsigned tx_nbits:3; //用于写入的位数。如果为0,则使用默认值(SPI_NBITS_SINGLE)。
unsigned rx_nbits:3; //用于读取的位数。如果为0,则使用默认值(SPI_NBITS_SINGLE)。
unsigned timestamped:1; //如果传输有时间戳,则为True
#define SPI_NBITS_SINGLE 0x01 ;
#define SPI_NBITS_DUAL 0x02 ;
#define SPI_NBITS_QUAD 0x04 ;
u8 bits_per_word; //为此传输选择一个bits_per_word,而不是设备默认值。如果为0,则使用默认值(来自spi_device)。
struct spi_delay delay; //在此传输之后(可选地)更改chipselect状态之前引入的延迟,然后开始下一次传输或完成此spi_message。
struct spi_delay cs_change_delay; //当设置了cs_change并且spi_transfer不是spi_message中的最后一个时,在cs deassert和assert之间的延迟。
struct spi_delay word_delay; //每个字长(由bits_per_word设置)传输后引入的字间延迟。
u32 speed_hz; //为此传输选择设备默认速度以外的速度。如果为0,则使用默认值(来自spi_device)。
u32 effective_speed_hz; //用于传输此传输的有效sck速度。如果SPI总线驱动不支持,设置为0。
unsigned int ptp_sts_word_pre; //在tx_buf中的字(受bits_per_word语义约束)偏移量,SPI设备为此请求开始此传输的时间快照。在完成SPI传输后,该值可能与请求的值相比发生了变化,这取决于可用的快照分辨率(DMA传输、ptp_sts_supported为false等)。
unsigned int ptp_sts_word_post;
struct ptp_system_timestamp *ptp_sts;
struct list_head transfer_list; //通过spi_message.transfers进行排序的transfer。
};
SPI传输总是需要写入与读取相同数量的字节。struct spi_driverSPI设备驱动程序应该提供rx_buf或tx_buf。在某些情况下,可能还需要为正在传输的数据提供DMA地址,当底层驱动程序使用DMA时,这样会减少CPU开销。
如果传输缓冲区为NULL,则在填充rx_buf时将移出零。如果接收缓冲区为NULL,则移入的数据将被丢弃。只有len字节移出(或移进)。
内存中的数据总是按照本地CPU字节顺序进行排列。例如:当bits_per_word为16时,缓冲区是2N字节长(len = 2N),并按CPU字节顺序保存N个16位字。
当SPI传输的字长不是8的2次幂倍数时,内存中的字包含额外的位。内存中的字总是被协议驱动程序视为右对齐,因此未定义(rx)或未使用(tx)位始终是最重要的位。
所有SPI传输从芯片选择(CS)被激活开始。通常,直到消息中的最后一次传输之后,它才会被选中。驱动程序可以使用cs_change影响芯片选择(CS)信号:
(1)如果传输不是消息中的最后一个,则此标志用于使CS在消息中间短暂地处于非活动状态。以这种方式切换CS可能需要终止一个芯片命令,让单个spi_message一起执行所有的芯片事务组。
(2)当传输是消息中的最后一个传输时,芯片可以保持选中状态直到下一次传输。在多设备SPI总线上,没有阻止消息到其他设备,这只是一个性能提示;向另一个设备发送消息将取消选中该设备。但在其他情况下,这可以用来确保正确性,一些SPI设备需要通过一系列spi_message提交来构建协议事务,其中一条消息的内容由之前消息的结果决定,当CS处于非活动状态时,整个事务结束。
当SPI可以在1x,2x或4x传输时。它可以通过tx_nbits和rx_nbits从设备获取传输信息。在双向传输中,tx_nbits和rx_nbits都应该被设置。用户可以设置传输模式SPI_NBITS_SINGLE(1x)、SPI_NBITS_DUAL(2x)和SPI_NBITS_QUAD(4x)来支持这三种传输方式。
将spi_message(及其spi_transfers)提交给较低层的代码负责管理其内存。因此零初始化没有显式设置的字段,可以防止未来API更新。在提交消息及其传输之后,忽略它们,直到它完成回调。
8、struct spi_message
spi_message用于执行数据传输的原子序列,每个序列由struct spi_transfer表示。该结构定义如下:
struct spi_message {
struct list_head transfers; //该传输中传输段链表
struct spi_device *spi; //表示该传输的SPI设备
unsigned is_dma_mapped:1; //如果为true,则调用者为每个传输缓冲区提供DMA和CPU虚拟地址。
bool prepared; //是否为此消息调用spi_prepare_message()
int status; //表示传输状态,0表示成功,否则为负errno
void (*complete)(void *context); //调用该回调以报告事务的完成情况。
void *context; //调用complete()时的参数。
unsigned frame_length; //message中的总字节数。
unsigned actual_length; //传输成功的字节总数。
struct list_head queue; //该参数供当前拥有该消息的驱动程序使用。
void *state; //该参数供当前拥有该消息的驱动程序使用。
struct list_head resources; //用于处理SPI消息时的资源管理。
struct spi_transfer t[]; //该组成元素用于spi_message_alloc()。(当消息和传输已经一起分配时)
};
一个spi_message用于执行数据传输的原子序列,每个序列由struct spi_transfer结构表示。该序列是“原子的”,因为在该序列完成之前,没有其他spi_message可以使用该SPI总线。在一些系统中,许多这样的序列可以作为单个编程的DMA传输来执行。在所有系统上,这些消息都是以队列方式组织的,并且可能在发送到其他设备的事务之后完成,发送到给定spi_device的消息总是按照FIFO顺序执行。
将spi_message(及其spi_transfers)提交给较底层的代码负责管理其内存。使用零初始化没有显式设置的每个字段,以隔离后续可能发生的API更新带来的影响。
9、struct spi_board_info
struct spi_board_info用于SPI设备的特定板卡模板。该结构定义如下:
struct spi_board_info {
char modalias[SPI_NAME_SIZE]; //用于初始化spi_device.modalias,用于识别驱动程序。
const void *platform_data; //用于初始化spi_device.platform_data,用于存储特定数据。
const struct software_node *swnode; //用于描述设备的软件节点
void *controller_data; //用于初始化spi_device.controller_data;一些控制器需要提示硬件设置,例如DMA。
int irq; //用于初始化spi_device.irq;取决于板卡的连接。
u32 max_speed_hz; //用于初始化spi_device.max_speed_hz;基于芯片数据表和主板特定信号质量问题的限制。
u16 bus_num; //识别哪些spi_controller作为spi_device的父设备;在spi_new_device()中未使用,取决于板卡接线。
u16 chip_select; //用于初始化spi_device.chip_select;取决于板卡连接。
u32 mode; //用于初始化spi_device.mode;根据芯片数据表,电路板布线。
};
当向设备树中添加新的SPI设备时,该结构可用作设备模板,该结构在两个地方使用,第一个作用是可存储在板卡特定设备描述符的表中,这些描述符在板卡初始化的早期声明,然后在控制器的驱动程序初始化之后使用。第二个作用是作为spi_new_device()调用的参数。
四、SPI框架的常用API总结
linux内核不同版本的SPI框架开放的API可能不同,以具体源码为主!
//1、初始化spi_message并附加到transfer void spi_message_init_with_transfers(struct spi_message *m, struct spi_transfer *xfers, unsigned int num_xfers) //2、检查是否支持每字位 bool spi_is_bpw_supported(struct spi_device *spi, u32 bpw) //3、计算一个合适的超时值 unsigned int spi_controller_xfer_timeout(struct spi_controller *ctlr, struct spi_transfer *xfer) //4、同步SPI数据传输 int spi_sync_transfer(struct spi_device *spi, struct spi_transfer *xfers, unsigned int num_xfers) //5、SPI同步写操作 int spi_write(struct spi_device *spi, const void *buf, size_t len) //6、SPI同步读操作 int spi_read(struct spi_device *spi, void *buf, size_t len) //7、SPI同步8位写然后8位读 ssize_t spi_w8r8(struct spi_device *spi, u8 cmd) //8、SPI同步8位写然后16位读 ssize_t spi_w8r16(struct spi_device *spi, u8 cmd) //9、SPI同步8位写入,然后16位大端读 ssize_t spi_w8r16be(struct spi_device *spi, u8 cmd) //10、为给定的board注册SPI设备 int spi_register_board_info(struct spi_board_info const *info, unsigned n) //11、注册一个SPI驱动 int __spi_register_driver(struct module *owner, struct spi_driver *sdrv) //12、分配新的SPI设备 struct spi_device *spi_alloc_device(struct spi_controller *ctlr) //13、向SPI核心添加使用spi_alloc_device分配的spi_device int spi_add_device(struct spi_device *spi) //14、实例化一个新的SPI设备 struct spi_device *spi_new_device(struct spi_controller *ctlr, struct spi_board_info *chip) //15、注销单个SPI设备 void spi_unregister_device(struct spi_device *spi) //16、报告transfer的完成情况 void spi_finalize_current_transfer(struct spi_controller *ctlr) //17、获取TX开始时间戳的助手函数 void spi_take_timestamp_pre(struct spi_controller *ctlr, struct spi_transfer *xfer, size_t progress, bool irqs_off) //18、获取TX结束时间戳的助手函数 void spi_take_timestamp_post(struct spi_controller *ctlr, struct spi_transfer *xfer, size_t progress, bool irqs_off) //19、获取下一个排队的消息。(由驱动程序调用用于检查排队的消息) struct spi_message *spi_get_next_queued_message(struct spi_controller *ctlr) //20、由驱动程序调用,通知内核队列前面的消息已经完成,可以从队列中删除。 void spi_finalize_current_message(struct spi_controller *ctlr) //21、注册辅助SPI设备(该函数只能从主SPI设备的probe函数中调用) struct spi_device *spi_new_ancillary_device(struct spi_device *spi, u8 chip_select) //22、统计SpiSerialBus资源的个数 int acpi_spi_count_resources(struct acpi_device *adev) //23、中止SPI从控制器上正在进行的传输请求 int spi_slave_abort(struct spi_device *spi) //24、分配一个SPI主控制器或者从控制器 struct spi_controller *__spi_alloc_controller(struct device *dev, unsigned int size, bool slave) //25、带资源管理的__spi_alloc_controller() struct spi_controller *__devm_spi_alloc_controller(struct device *dev, unsigned int size, bool slave) //26、注册SPI主控制器或者从控制器 int spi_register_controller(struct spi_controller *ctlr) //27、带资源管理的spi_register_controller() int devm_spi_register_controller(struct device *dev, struct spi_controller *ctlr) //28、注销SPI主控制器或从控制器 void spi_unregister_controller(struct spi_controller *ctlr) //29、当单个传输超过一定大小时,将spi传输拆分为多个传输 int spi_split_transfers_maxsize(struct spi_controller *ctlr, struct spi_message *msg, size_t maxsize, gfp_t gfp) //30、当单个传输超过一定数量的SPI字时,将SPI传输拆分为多个传输 int spi_split_transfers_maxwords(struct spi_controller *ctlr, struct spi_message *msg, size_t maxwords, gfp_t gfp) //31、设置SPI模式和时钟速率 int spi_setup(struct spi_device *spi) //32、异步SPI传输 int spi_async(struct spi_device *spi, struct spi_message *message) //33、阻塞/同步SPI数据传输 int spi_sync(struct spi_device *spi, struct spi_message *message) //34、具有独占总线使用的spi_sync()版本 int spi_sync_locked(struct spi_device *spi, struct spi_message *message) //35、获得独占SPI总线使用的锁 int spi_bus_lock(struct spi_controller *ctlr) //36、释放独占SPI总线使用的锁 int spi_bus_unlock(struct spi_controller *ctlr) //37、SPI同步写然后读。 int spi_write_then_read(struct spi_device *spi, const void *txbuf, unsigned n_tx, void *rxbuf, unsigned n_rx)
五、SPI驱动实例分析
SPI驱动分为两个部分:主机侧驱动和设备侧驱动。
(5-1)SPI主机侧驱动
(1)SPI主机侧驱动设计思路
一般情况下,SPI主机侧的驱动程序芯片原厂,会去实现,并会合并到自己厂家维护的linux内核版本中发布给其他基于该芯片设计的厂商。在实现SPi主机侧驱动的时候,可以基于平台设备驱动框架实现,然后使用module_platform_driver()或者其他模块函数导出,例如:module_init()。在平台驱动的.probe指向的函数中实现spi驱动:
1、区分spi驱动是slave还是master,并创建对应的struct spi_controller,如果是slave,则使用spi_alloc_slave()创建,如果是master,则使用spi_allov_master()创建。
2、实现spi寄存器相关的映射。
3、设置spi时钟。
4、创建spi中断服务函数(以中断线程化方式实现)。
5、初始化spi_controller相关组成元素的信息。
6、指定struct spi_controller操作的callback。
7、spi控制器相关的状态获取和保存。
8、注册spi控制器。可使用devm_spi_register_controller()或者相关接口实现。
(2)、SPI主机侧驱动案例分析
本小节,以Rockchip的rk3568的SPI主机侧驱动为例。分析SPI主机侧驱动的实现步骤,rk3568的spi驱动位于/drivers/spi/spi-rockchip.c(以具体linux内核源码为准)文件中。该驱动以platform驱动框架为基础实现,对应的struct platform_driver实现如下:
static struct platform_driver rockchip_spi_driver = {
.driver = {
.name = DRIVER_NAME,
.pm = &rockchip_spi_pm,
.of_match_table = of_match_ptr(rockchip_spi_dt_match),
},
.probe = rockchip_spi_probe,
.remove = rockchip_spi_remove,
};
module_platform_driver(rockchip_spi_driver);
在源码的最后使用module_platform_driver()导出spi驱动。
接着看看rockchip_spi_dt_match设备匹配表,定义如下:
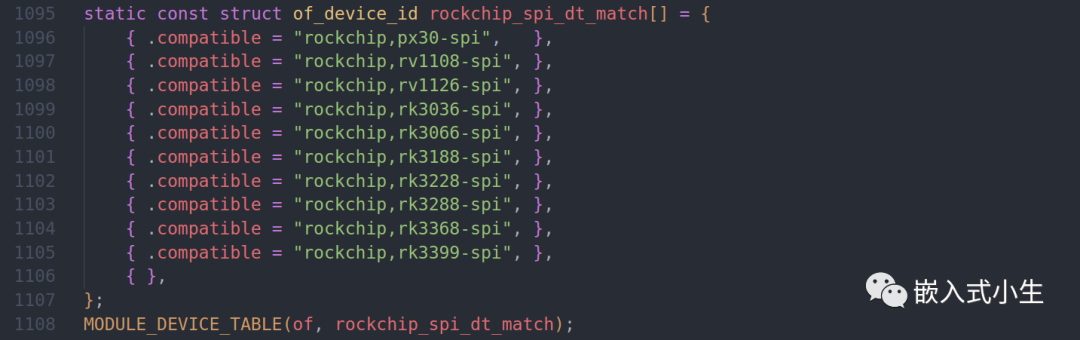
可见该spi驱动支持的芯片类型比较多。
再看看.probe对应的rockchip_spi_probe(),该函数实现如下(函数中内容较多):
static int rockchip_spi_probe(struct platform_device *pdev)
{
int ret;
struct rockchip_spi *rs;
struct spi_controller *ctlr;
struct resource *mem;
struct device_node *np = pdev->dev.of_node;
u32 rsd_nsecs;
bool slave_mode;
struct pinctrl *pinctrl = NULL;
slave_mode = of_property_read_bool(np, "spi-slave");
if (slave_mode)
ctlr = spi_alloc_slave(&pdev->dev,
sizeof(struct rockchip_spi));
else
ctlr = spi_alloc_master(&pdev->dev,
sizeof(struct rockchip_spi));
if (!ctlr)
return -ENOMEM;
platform_set_drvdata(pdev, ctlr);
rs = spi_controller_get_devdata(ctlr);
ctlr->slave = slave_mode;
/* Get basic io resource and map it */
mem = platform_get_resource(pdev, IORESOURCE_MEM, 0);
rs->regs = devm_ioremap_resource(&pdev->dev, mem);
if (IS_ERR(rs->regs)) {
ret = PTR_ERR(rs->regs);
goto err_put_ctlr;
}
rs->apb_pclk = devm_clk_get(&pdev->dev, "apb_pclk");
if (IS_ERR(rs->apb_pclk)) {
dev_err(&pdev->dev, "Failed to get apb_pclk
");
ret = PTR_ERR(rs->apb_pclk);
goto err_put_ctlr;
}
rs->spiclk = devm_clk_get(&pdev->dev, "spiclk");
if (IS_ERR(rs->spiclk)) {
dev_err(&pdev->dev, "Failed to get spi_pclk
");
ret = PTR_ERR(rs->spiclk);
goto err_put_ctlr;
}
ret = clk_prepare_enable(rs->apb_pclk);
if (ret < 0) {
dev_err(&pdev->dev, "Failed to enable apb_pclk
");
goto err_put_ctlr;
}
ret = clk_prepare_enable(rs->spiclk);
if (ret < 0) {
dev_err(&pdev->dev, "Failed to enable spi_clk
");
goto err_disable_apbclk;
}
spi_enable_chip(rs, false);
ret = platform_get_irq(pdev, 0);
if (ret < 0)
goto err_disable_spiclk;
ret = devm_request_threaded_irq(&pdev->dev, ret, rockchip_spi_isr, NULL,
IRQF_ONESHOT, dev_name(&pdev->dev), ctlr);
if (ret)
goto err_disable_spiclk;
rs->dev = &pdev->dev;
rs->freq = clk_get_rate(rs->spiclk);
rs->gpio_requested = false;
if (!of_property_read_u32(pdev->dev.of_node, "rx-sample-delay-ns",
&rsd_nsecs)) {
/* rx sample delay is expressed in parent clock cycles (max 3) */
u32 rsd = DIV_ROUND_CLOSEST(rsd_nsecs * (rs->freq >> 8),
1000000000 >> 8);
if (!rsd) {
dev_warn(rs->dev, "%u Hz are too slow to express %u ns delay
",
rs->freq, rsd_nsecs);
} else if (rsd > CR0_RSD_MAX) {
rsd = CR0_RSD_MAX;
dev_warn(rs->dev, "%u Hz are too fast to express %u ns delay, clamping at %u ns
",
rs->freq, rsd_nsecs,
CR0_RSD_MAX * 1000000000U / rs->freq);
}
rs->rsd = rsd;
}
rs->fifo_len = get_fifo_len(rs);
if (!rs->fifo_len) {
dev_err(&pdev->dev, "Failed to get fifo length
");
ret = -EINVAL;
goto err_disable_spiclk;
}
pm_runtime_set_active(&pdev->dev);
pm_runtime_enable(&pdev->dev);
ctlr->auto_runtime_pm = true;
ctlr->bus_num = pdev->id;
ctlr->mode_bits = SPI_CPOL | SPI_CPHA | SPI_LOOP | SPI_LSB_FIRST | SPI_CS_HIGH;
if (slave_mode) {
ctlr->mode_bits |= SPI_NO_CS;
ctlr->slave_abort = rockchip_spi_slave_abort;
} else {
ctlr->flags = SPI_MASTER_GPIO_SS;
}
ctlr->num_chipselect = ROCKCHIP_SPI_MAX_CS_NUM;
ctlr->dev.of_node = pdev->dev.of_node;
ctlr->bits_per_word_mask = SPI_BPW_MASK(16) | SPI_BPW_MASK(8) | SPI_BPW_MASK(4);
ctlr->min_speed_hz = rs->freq / BAUDR_SCKDV_MAX;
ctlr->max_speed_hz = min(rs->freq / BAUDR_SCKDV_MIN, MAX_SCLK_OUT);
ctlr->set_cs = rockchip_spi_set_cs;
ctlr->setup = rockchip_spi_setup;
ctlr->cleanup = rockchip_spi_cleanup;
ctlr->transfer_one = rockchip_spi_transfer_one;
ctlr->max_transfer_size = rockchip_spi_max_transfer_size;
ctlr->handle_err = rockchip_spi_handle_err;
ctlr->dma_tx = dma_request_chan(rs->dev, "tx");
if (IS_ERR(ctlr->dma_tx)) {
/* Check tx to see if we need defer probing driver */
if (PTR_ERR(ctlr->dma_tx) == -EPROBE_DEFER) {
ret = -EPROBE_DEFER;
goto err_disable_pm_runtime;
}
dev_warn(rs->dev, "Failed to request TX DMA channel
");
ctlr->dma_tx = NULL;
}
ctlr->dma_rx = dma_request_chan(rs->dev, "rx");
if (IS_ERR(ctlr->dma_rx)) {
if (PTR_ERR(ctlr->dma_rx) == -EPROBE_DEFER) {
ret = -EPROBE_DEFER;
goto err_free_dma_tx;
}
dev_warn(rs->dev, "Failed to request RX DMA channel
");
ctlr->dma_rx = NULL;
}
if (ctlr->dma_tx && ctlr->dma_rx) {
rs->dma_addr_tx = mem->start + ROCKCHIP_SPI_TXDR;
rs->dma_addr_rx = mem->start + ROCKCHIP_SPI_RXDR;
ctlr->can_dma = rockchip_spi_can_dma;
}
switch (readl_relaxed(rs->regs + ROCKCHIP_SPI_VERSION)) {
case ROCKCHIP_SPI_VER2_TYPE1:
case ROCKCHIP_SPI_VER2_TYPE2:
if (ctlr->can_dma && slave_mode)
rs->cs_inactive = true;
else
rs->cs_inactive = false;
break;
default:
rs->cs_inactive = false;
}
pinctrl = devm_pinctrl_get(&pdev->dev);
if (!IS_ERR(pinctrl)) {
rs->high_speed_state = pinctrl_lookup_state(pinctrl, "high_speed");
if (IS_ERR_OR_NULL(rs->high_speed_state)) {
dev_warn(&pdev->dev, "no high_speed pinctrl state
");
rs->high_speed_state = NULL;
}
}
ret = devm_spi_register_controller(&pdev->dev, ctlr);
if (ret < 0) {
dev_err(&pdev->dev, "Failed to register controller
");
goto err_free_dma_rx;
}
return 0;
err_free_dma_rx:
if (ctlr->dma_rx)
dma_release_channel(ctlr->dma_rx);
err_free_dma_tx:
if (ctlr->dma_tx)
dma_release_channel(ctlr->dma_tx);
err_disable_pm_runtime:
pm_runtime_disable(&pdev->dev);
err_disable_spiclk:
clk_disable_unprepare(rs->spiclk);
err_disable_apbclk:
clk_disable_unprepare(rs->apb_pclk);
err_put_ctlr:
spi_controller_put(ctlr);
return ret;
}
上述.probe实现的主要步骤如下:
读取spi-slave属性获取模式,如果是slave模式,则调用spi_alloc_slave()分配struct spi_contoller内存,否则为master模式,则调用spi_alloc_master()同样分配一个struct spi_contoller内存。
获取基本的IO资源并对其进行映射。
获取时钟并enable时钟。
调用platform_get_irq()获取中断号,接着调用devm_request_threaded_irq()创建中断处理函数,其中中断处理函数为rockchip_spi_isr()。
设置struct rockchip_spi结构中的组成元素。struct rockchip_spi表示具体的spi控制器。
设置struct spi_controller 结构中的组成元素。
最后调用devm_spi_register_controller()注册spi控制器。
(5-2)SPI设备侧驱动
(1)SPI设备侧驱动设计思路
对于SPI设备的驱动,主要围绕如何与该SPI设备进行数据通信或者实现控制。在SPI控制器驱动实现的情况下,SPI设备侧的实现思路:
1、对SPI设备进行描述。
可以通过修改设备树的方式对SPI设备进行描述。
2、创建struct spi_driver的具体实例作为设备侧驱动。
3、SPI设备数据收发处理流程
SPI设备数据的收发主要涉及到两个数据结构:struct spi_message、struct spi_transfer,还需要几个用于传输的API:
//在使用spi_message之前需要对其进行初始化: void spi_message_init(struct spi_message *m) //spi_message初始化完成以后可使用spi_message_add_tail将spi_transfer添加到spi_message队列中: void spi_message_add_tail(struct spi_transfer *t, struct spi_message *m) //spi_message准备好以后既可以进行数据传输了,数据传输分为同步传输和异步传输,同步 //传输会阻塞的等待SPI数据传输完成,同步传输函数为spi_sync(): int spi_sync(struct spi_device *spi, struct spi_message *message) //异步传输不会阻塞的等到SPI数据传输完成,异步传输需要设置spi_message中的complete成员变量,complete是一个回调函数,当SPI异步传输完成以后此函数就会被调用。SPI异步传 //输函数为spi_async(): int spi_async(struct spi_device *spi, struct spi_message *message)
4、根据具体驱动需求设计struct file_operations对应的ops的callback。
5、在.probe中使用spi_register_driver()向SPI核心注册SPI驱动,以字符设备类方式导出用户空间SPI设备文件,分配中断等
6、以驱动框架方式导出。
(2)、SPI设备侧驱动案例分析
当主机侧的SPI实现后,我们可以快速使用SPI控制器与SPI设备进行通信了。本小节以icm20608这款常见的SPI接口的六轴传感器为例分析SPI设备侧驱动的具体实现步骤。
首先使用struct spi_driver创建spi驱动实例icm20608_driver,指定其中的.probe、.remove、driver参数,如有必要可实现.id_table:
static struct spi_driver icm20608_driver = {
.probe = icm20608_probe,
.remove = icm20608_remove,
.driver = {
.owner = THIS_MODULE,
.name = "ICM20608",
.of_match_table = icm20608_of_match,
},
};
接着使用module_init()初始化模块,在模块初始化函数中调用spi_register_driver()将icm20608_driver注册到linux内核。然后实现模块退出接口函数,在该函数中实现必要的退出清理操作。
接着实现icm20608_probe()、icm20608_remove和设备树匹配表icm20608_of_match。
在icm20608_probe()中以字符设备方式向用户暴露出设备文件。并实现对icm20608设备文件的struct file_operations中的callback。例如:.open、.read、release。因icm20608为六轴传感器,主要操作是读取数据,所以.write可以不用实现。
在实现.read操作时,主要内容是使用SPI控制器发送相应控制数据到SPI设备。使用SPI控制器发送数据的代码如下:
int icm20608_readRegs(struct icm20608_dev *dev, u8 reg, void *buf, int len)
{
int ret;
unsigned char txdata[len];
struct spi_message message;
struct spi_transfer *transfer;
struct spi_device *spi = (struct spi_device *)dev->private_data;
/* 1、申请内存 */
transfer = kzalloc(sizeof(struct spi_transfer), GFP_KERNEL);
/* 2、发送要读取的寄存地址 */
txdata[0] = reg | 0x80; /* 写数据的时候寄存器地址bit8要置1 */
transfer->tx_buf = txdata; /* 要发送的数据 */
transfer->len = 1; /* 1个字节 */
/* 3、初始化spi_message */
spi_message_init(&message);
/* 4、将spi_transfer添加到spi_message队列 */
spi_message_add_tail(transfer, &message);
/* 5、同步发送 */
ret = spi_sync(spi, &message);
/* 6、释放内存 */
kfree(transfer);
return ret;
}
六、SPI驱动调试总结
在SPI驱动调试过程中,还是需要注意以下几点:
(1)确保自己系统的SPI成功运行。这是SPI设备能正常通信工作的前提条件。
(2)在进行SPI数据传输时,确认时序是否正确:发送引脚有正常的波形,CLK引脚有正常的时钟信号,CS引脚有拉低。
(3)确保SPI的4个引脚的引脚复用配置正确。
审核编辑:刘清
-
使用nRFF54L15初始化一个SPI2025-06-27 1030
-
stm32单片机用spi初始化sd卡中的一些问题及反思2021-12-22 977
-
SPI主机驱动Linux简析2021-11-02 1988
-
嵌入式Linux SPI驱动2021-11-01 777
-
STM32的SPI1、SPI2、SPI3初始化及RF1101的应用2021-08-05 2469
-
SPI模块的初始化代码2021-08-04 1022
-
Linux内核初始化过程中的调用顺序2019-05-12 2118
-
单片机SPI口初始化设计2018-12-06 2920
-
SD卡的SPI模式的初始化顺序2018-09-21 1473
-
uboot和内核里phy的初始化_内核里的双网络配置及phy的初始化2018-05-17 13483
-
解析内核初始化时根内存盘的加载过程2017-11-08 1281
-
Linux内存初始化2017-10-12 1141
-
SPI接口初始化函数spi_master_init2013-04-03 3226
-
LINUX系统引导和初始化-LINUX内核解读2011-11-03 625
全部0条评论

快来发表一下你的评论吧 !
