

单相异步电动机的构造与工作原理
工业控制
描述
单相异步电动机中,专用电机占有很大比例,它们的结构各有特点,形式繁多。但就其共性而言,电动机的结构都由固定部分---定子、转动部分----转子、支撑部分---端盖和轴承等三大部分组成。
构造
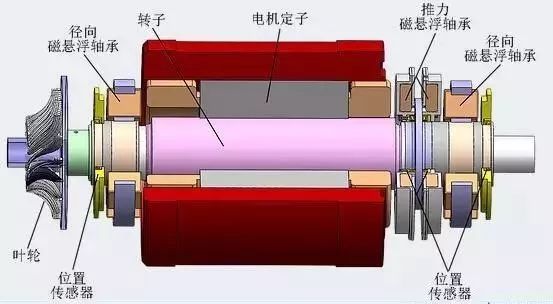
交流伺服电机通常都是单相异步电动机,有鼠笼形转子和杯形转子两种结构形式。与普通电机一样,交流伺服电机也由定子和转子构成。定子上有两个绕组,即励磁绕组和控制绕组,两个绕组在空间相差90°电角度。固定和保护定子的机座一般用硬铝或不锈钢制成。笼型转子交流伺服电机的转子和普通三相笼式电机相同。杯形转子交流伺服电机的结构由外定子,杯形转子和内定子三部分组成。它的外定子和笼型转子交流伺服电机相同,转子则由非磁性导电材料(如铜或铝)制成空心杯形状,杯子底部固定在转轴7上。空心杯的壁很薄(小于0.5mm),因此转动惯量很小。内定子由硅钢片叠压而成,固定在一个端盖上,内定子上没有绕组,仅作磁路用。电机工作时,内﹑外定子都不动,只有杯形转子在内、外定子之间的气隙中转动。对于输出功率较小的交流伺服电机,常将励磁绕组和控制绕组分别安放在内、外定子铁心的槽内。

电机主要部件包括:1、机座;2、铁心;3、绕组;4、端盖;5、轴承;6、离心开关或起动继电器和PTC起动器;7、铭牌。
1 机座
机座结构随电动机冷却方式、防护型式、安装方式和用途而异。按其材料分类,有铸铁、铸铝和钢板结构等几种。铸铁机座,带有散热筋。机座与端盖联接,用螺栓紧固。铸铝机座一般不带有散热筋。钢板结构机座,是由厚为1.5-2.5毫米的薄钢板卷制、焊接而成,再焊上钢板冲压件的底脚。有的专用电动机的机座相当特殊,如电冰箱的电动机,它通常与压缩机一起装在一个密封的罐子里。而洗衣机的电动机,包括甩干机的电动机,均无机座,端盖直接固定在定子铁心上。
2 铁心
铁心包括定子铁心和转子铁心,作用与三相异步电动机一样,是用来构成电动机的磁路。
3 绕组
单相异步电动机定子绕组常做成两相:主绕组(工作绕组)和副绕组(启动绕组)。两种绕组的中轴线错开一定的电角度。目的是为了改善启动性能和运行性能。定子绕组多采用高强度聚脂漆包线绕制。
转子绕组一般采用笼型绕组。常用铝压铸而成。
4 端盖
相应于不同的机座材料、端盖也有铸铁件、铸铝件和钢板冲压件。
5 轴承
轴承有滚珠轴承和含油轴承。
6 离心开关或起动继电器和PTC起动器
(1)离心开关
在单相异步电动机中,除了电容运转电动机外,在起动过程中,当转子转速达到同步转速的70%左右时,常借助于离心开关,切除单相电阻起动异步电动机和电容起动异步电动机的起动绕组,或切除电容起动及运转异步电动机的起动电容器。离心开关一般安装在轴伸端盖的内侧。
(2)起动继电器
有些电动机,如电冰箱电动机,由于它与压缩机组装在一起,并放在密封的罐子里,不便于安装离心开关,就用起动继电器代替。继电器的吸铁线圈串联在主绕组回路中,起动时,主绕组电流很大,衔铁动作,使串联在副绕组回路中的动合触点闭合。于是副绕组接通,电动机处于两相绕组运行状态。随着转子转速上升,主绕组电流不断下降,吸引线圈的吸力下降。当到达一定的转速,电磁铁的吸力小于触点的反作用弹簧的拉力,触点被打开,副绕组就脱离电源。
(3)PTC起动器
最新式的启动元件是“PTC”,它是一种能“通”或“断”的热敏电阻。PTC热敏电阻是一种新型的半导体元件,可用作延时型起动开关。使用时,将PTC元件与电容起动或电阻起动电机的副绕组串联。在起动初期,因PTC热敏电阻尚未发热,阻值很低,副绕组处于通路状态,电机开始起动。随着时间的推移,电机的转速不断增加,PTC元件的温度因本身的焦耳热而上升,当超过居里点Tc(即电阻急剧增加的温度点),电阻剧增,副绕组电路相当于断开,但还有一个很小的维持电流,并有2-3瓦的损耗,使PTC元件的温度维持在居里点Tc值以上。当电机停止运行后,PTC元件温度不断下降,约2-3分钟其电阻值降到Tc点以下,这时有可以重新启动,这一时间正好是电冰箱和空调机所规定的两次开机间的停机时间。
PTC起动器的优点:无触点、运行可靠、无噪无电火花,防火、防爆性能好。且耐振动、耐冲击、体积小、重量轻、价格低。
7 铭牌
包括:电机名称、型号、标准编号、制造厂名、出厂编号、额定电压、额定功率、额定电流、额定转速、绕组接法、绝缘等级等。
原理
交流伺服电机的工作原理和单相感应电动机无本质上的差异。但是,交流伺服电机必须具备一个性能,就是能克服交流伺服电机的所谓“自转”现象,即无控制信号时,它不应转动,特别是当它已在转动时,如果控制信号消失,它应能立即停止转动。而普通的感应电动机转动起来以后,如控制信号消失,往往仍在继续转动。
当电机原来处于静止状态时,如控制绕组不加控制电压,此时只有励磁绕组通电产生脉动磁场。可以把脉动磁场看成两个圆形旋转磁场。这两个圆形旋转磁场以同样的大小和转速,向相反方向旋转,所建立的正、反转旋转磁场分别切割笼型绕组(或杯形壁)并感应出大小相同,相位相反的电动势和电流(或涡流),这些电流分别与各自的磁场作用产生的力矩也大小相等、方向相反,合成力矩为零,伺服电机转子转不起来。一旦控制系统有偏差信号,控制绕组就要接受与之相对应的控制电压。
在一般情况下,电机内部产生的磁场是椭圆形旋转磁场。一个椭圆形旋转磁场可以看成是由两个圆形旋转磁场合成起来的。这两个圆形旋转磁场幅值不等(与原椭圆旋转磁场转向相同的正转磁场大,与原转向相反的反转磁场小),但以相同的速度,向相反的方向旋转。它们切割转子绕组感应的电势和电流以及产生的电磁力矩也方向相反、大小不等(正转者大,反转者小)合成力矩不为零,所以伺服电机就朝着正转磁场的方向转动起来,随着信号的增强,磁场接近圆形,此时正转磁场及其力矩增大,反转磁场及其力矩减小,合成力矩变大,如负载力矩不变,转子的速度就增加。如果改变控制电压的相位,即移相180o,旋转磁场的转向相反,因而产生的合成力矩方向也相反,伺服电机将反转。若控制信号消失,只有励磁绕组通入电流,伺服电机产生的磁场将是脉动磁场,转子很快地停下来。
为使交流伺服电机具有控制信号消失,立即停止转动的功能,把它的转子电阻做得特别大,使它的临界转差率Sk大于1。在电机运行过程中,如果控制信号降为“零”,励磁电流仍然存在,气隙中产生一个脉动磁场,此脉动磁场可视为正向旋转磁场和反向旋转磁场的合成。图3-13画出正向及反向旋转磁场切割转子导体后产生的力矩一转速特性曲线,以及它们的合成特性曲线。假设电动机原来在单一正向旋转磁场的带动下运行于A点,此时负载力矩是。一旦控制信号消失,气隙磁场转化为脉动磁场,它可视为正向旋转磁场和反向旋转磁场的合成,电机即按合成特性曲线3运行。由于转子的惯性,运行点由A点移到B点,此时电动机产生了一个与转子原来转动方向相反的制动力矩。在负载力矩和制动力矩的作用下使转子迅速停止。
必须指出,普通的两相和三相异步电动机正常情况下都是在对称状态下工作,不对称运行属于故障状态。而交流伺服电机则可以靠不同程度的不对称运行来达到控制目的。这是交流伺服电机在运行上与普通异步电动机的根本区别。
审核编辑:黄飞
-
罩极式单相异步电动机的工作原理是什么2024-08-26 4538
-
单相异步电动机原理 单相异步电动机正反转接线法2024-01-24 5060
-
单相异步电动机和三相异步电动机的区别2023-03-22 10587
-
三相异步电动机的基本原理2021-09-01 3396
-
单相异步电动机和三相异步电动机的维护有何不同2021-03-03 3245
-
单相异步电动机和三相异步电动机的维护有什么不同?2020-12-14 2187
-
单相异步电动机的工作原理是什么?2020-04-07 4850
-
单相异步电动机的基本原理2014-01-21 7684
-
单相异步电动机的应用2010-02-25 1374
-
单相异步电动机原理2008-11-19 9529
-
单相异步电动机工作原理2007-12-26 2858
全部0条评论

快来发表一下你的评论吧 !
