

增量式编码器与绝对式编码器的区别
电子说
描述
来源:杰特仕光电传感器
概述
编码器有两种方式检测位移和位置信息:相对位置检测与绝对位置检测。相对位置的检测方法为增量式,绝对位置的检测方法包括绝对式和伪绝对式。相对式和绝对式各有优缺点,建议大家根据“测量目的”正确选用。
用什么样的电信号来表示位置信息
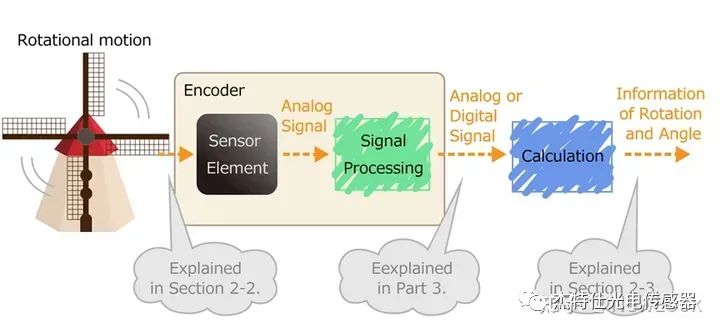
Fig.1 将旋转运动转换为角度信息的过程
在第二部分中,我们解释了检测位移与位置的方法分为四种类型。编码器有两种方式检测位移与位置信息:相对位置检测和绝对位置检测,并且编码器输出的电信号形式是不同的。相对位置:移动过了的角度或位移;绝对位置:当前位置与原点位置的距离。
检测相对位置的增量式
检测从一个位置到下一个位置的移动量称为相对式编码器。与地图进行类比,是一个相对位置检测类型,解释为“如果你在这条道路上向前走100米,向右走30米,然后就可以找到一家便利店”。相对位置检测的编码器根据位移距离输出脉冲信号,这种输出方式称为增量式。让我们以第二部分中讨论的光电编码器为例。当一个在径向上带有狭缝(孔)的圆盘旋转时,光电编码器产生脉冲。计算脉冲的数量可以看出圆盘的角度变化(运动)。当4个狭缝排列在整个圆周时,每旋转一圈的脉冲数为4个,因此可以看出1个脉冲旋转了360°/4=90°;如果狭缝数量增加到8个,则一个脉冲旋转360°/8=45°。如果狭缝的数量越多,即每旋转一圈产生脉冲的数量越大,角度变化的分辨率就越高,运动就能表现得越精细。
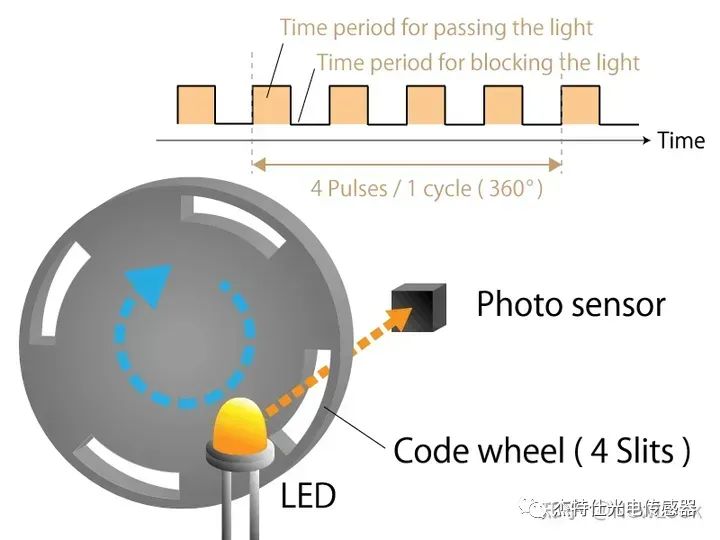
Fig.2a 4-狭缝增量式编码器
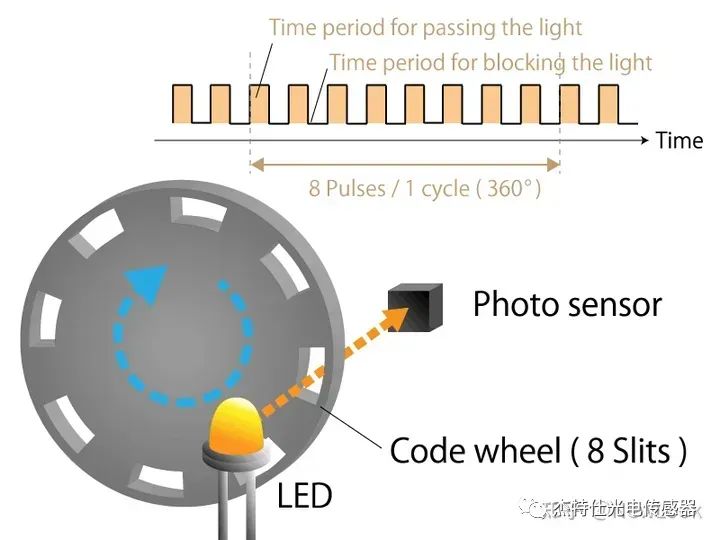
Fig.2b 8-狭缝增量式编码器
但是,该方法不能识别旋转方向的变化。因此,使用2个相位差为90°e的脉冲来解决这个问题,这2个脉冲通常被称为A相脉冲和B相脉冲,旋转方向可以根据A脉冲或B脉冲哪个先出现上升沿来确定。通过减去反向旋转的脉冲数,即使过程中旋转方向发生变化,也可以准确地确定旋转量。
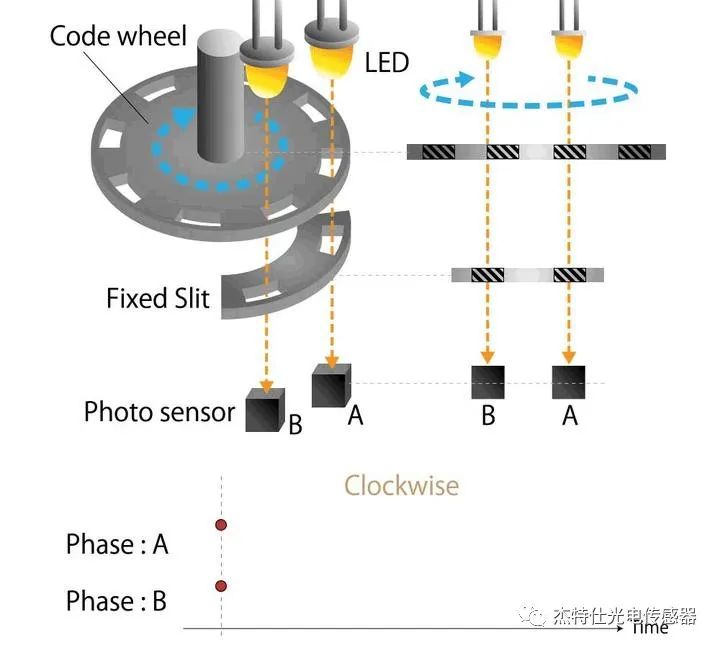
Fig.3a 顺时针旋转AB脉冲波形
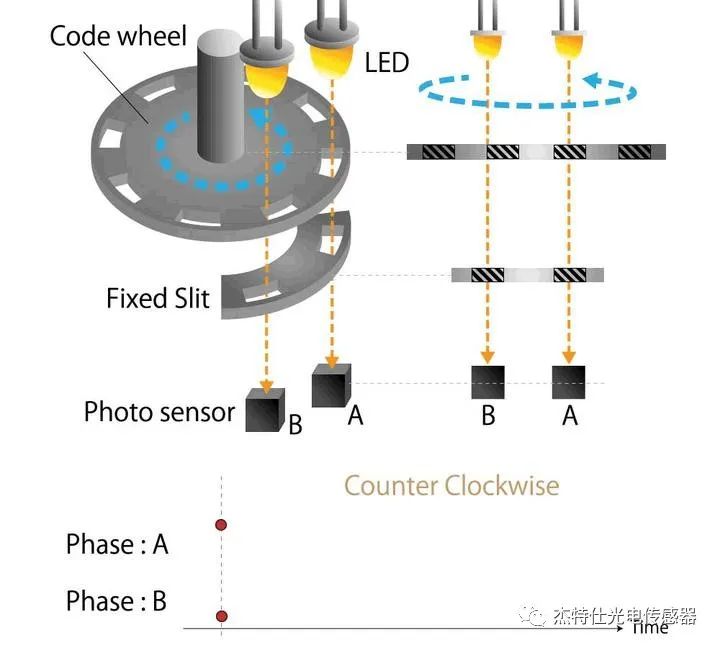
Fig.3b 逆时针旋转AB脉冲波形
检测绝对位置的绝对式
直接检测距离起始位置有多远的编码器称为绝对式编码器。与地图进行类比,绝对式编码器可以直接告诉你在“上海市浦东新区人民路22弄”有一家便利店。绝对式编码器响应来自微控制器的指令,以串行数据或电压作为输出传输位置信息,这种输出方式称为绝对式。我们再次以光电编码器为例,增量式编码器只有一排狭缝,而绝对式编码器则有多排狭缝。例如,如果有4排狭缝,可以用二进制码表示出从0000到1111的16个角度的绝对位置;如果有5排狭缝,则可表示出从00000到11111的32个不同角度;通过将狭缝增加到8排,你可以看到从00000000到11111111的256个不同角度的绝对位置。随着狭缝排数的增加,角度变化的分辨率也会增加,可以更精细地表示移动的角度。
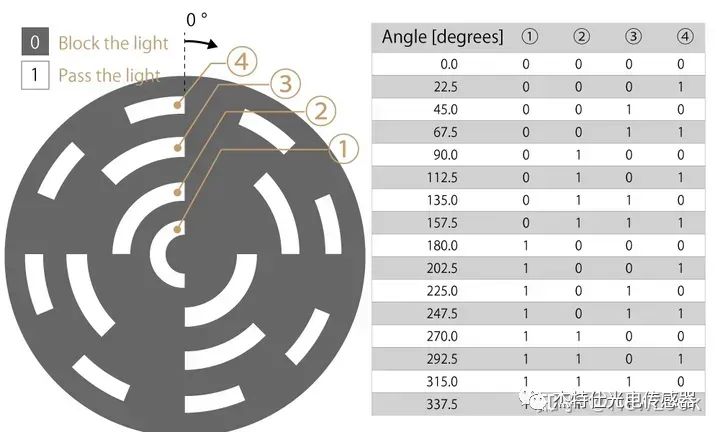
Fig.4a 4排狭缝的绝对式编码器
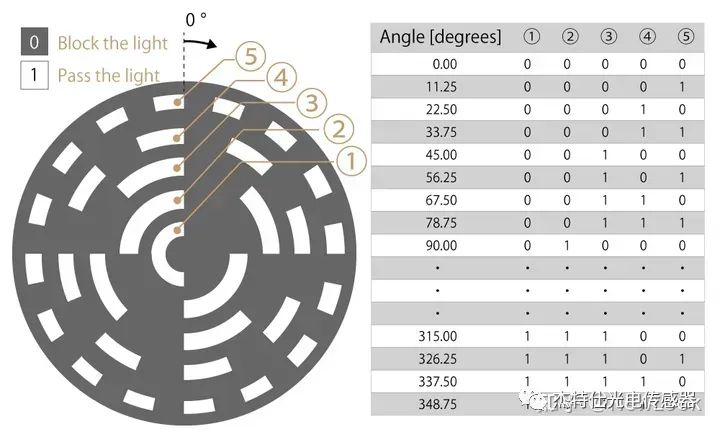
Fig.4b 5排狭缝的绝对式编码器
Z脉冲信号检测绝对角度的伪绝对式
绝对位置也可以用增量的方式来表示。该方法在产生A、B相脉冲狭缝的基础上,只增加1排狭缝(也只增加1个),并且每旋转一圈只产生1个单脉冲,这个脉冲被称为Z(Zero)脉冲。伪绝对式是一种通过检测Z相脉冲的旋转量来检测绝对位置的方法,Z相脉冲是A相和B相脉冲的起始位置。
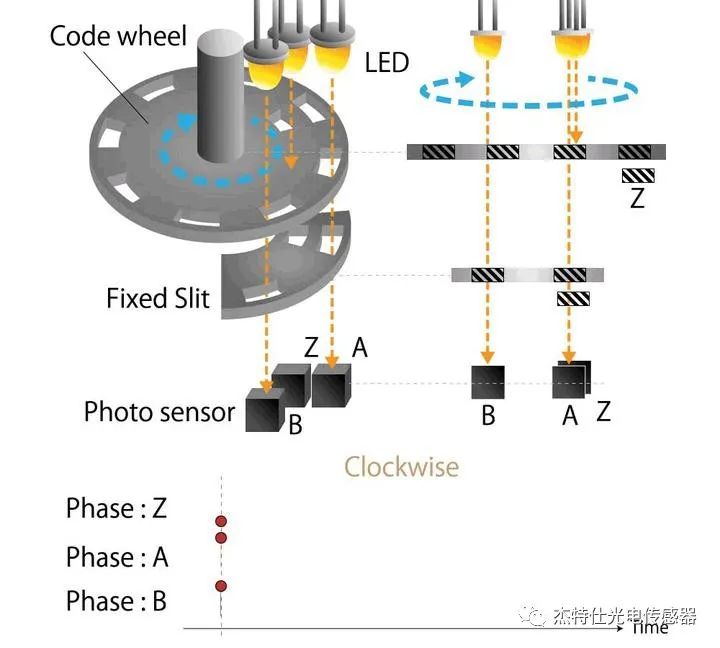
Fig.5a 顺时针旋转ABZ脉冲
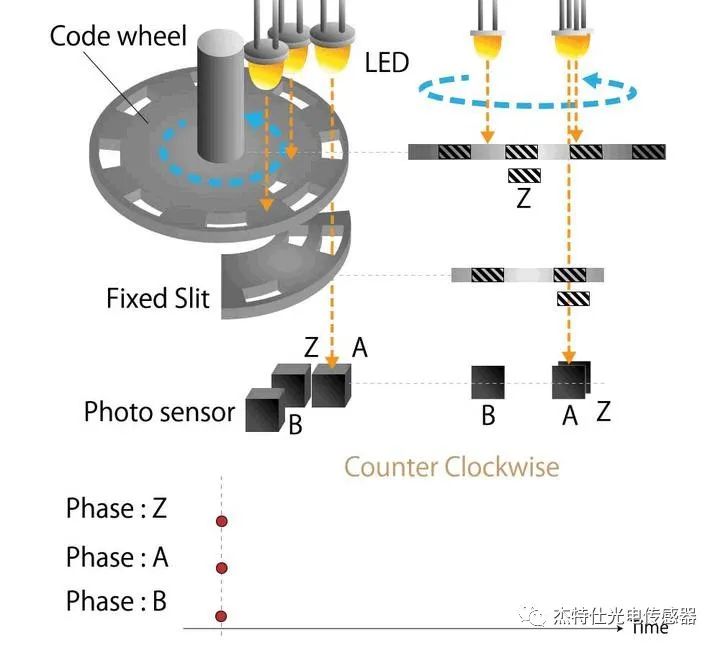
Fig.5b 逆时针旋转ABZ脉冲
增量式和绝对式的优缺点增量式编码器和绝对式编码器各有利弊。检测相对位置的增量式编码器只有一排狭缝(伪绝对式为两排),因此可以用更低的成本制造码盘。但是,检测绝对位置的绝对式编码器,狭缝是多排的,所以如果想要增加角度变化的分辨率,那么码盘的制造成本将是昂贵的。如果在断电后重新启动,绝对式可以检测到重新启动时的位置。但是在使用增量式和伪绝对式的情况下,由于累计角度已经被删除,无法检测到重启时的位置。另外,由于信号传输系统的原因,绝对式也是有利有弊。在绝对式编码器中有两种输出方式,一种是将二进制码作为数字信号输出;另一种是将二进制码转换为模拟电压并输出。此外,对于数字信号也是有两种输出方式的,一种是并行输出,通过多个信号线从多个狭缝中得到的二进制代码原样输出;另一种是串行输出,使用一个信号线传输,同时将并行输出的多个信号转换为串行数据,并随时间顺序依次传输。
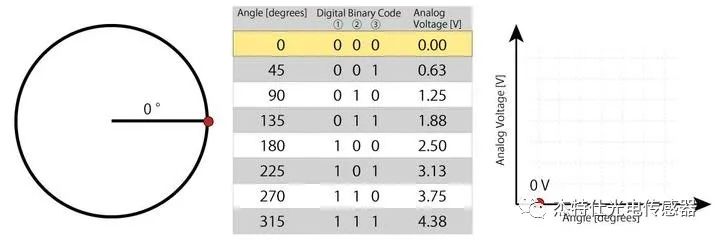
Fig.6 角度信息、数字输出信号的二进制编码和模拟输出电压之间的关系
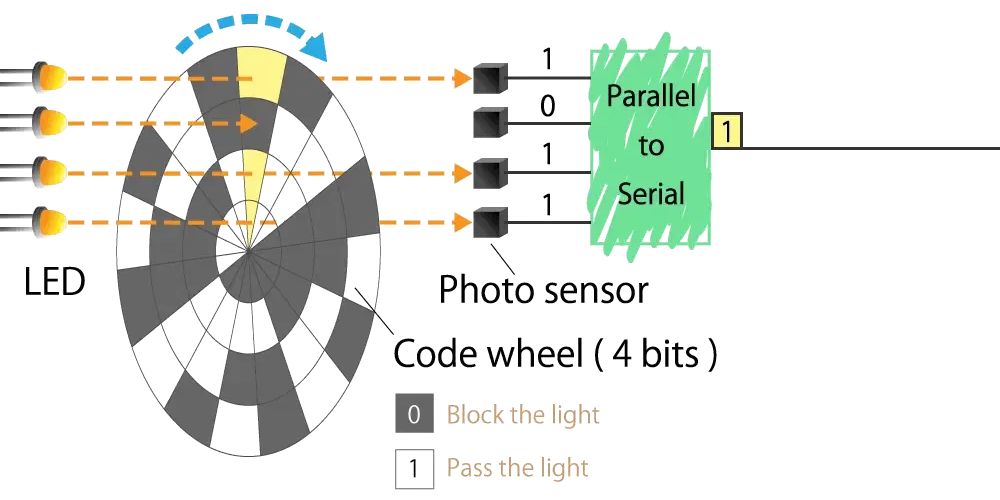
Fig.7 并行输出信号和串行转换输出信号
数字信号在传输过程中具有抗噪声能力强的优点。然而,并行输出的缺点是增加了信号线的数量,由于串行输出需要时间通信,所以如果电机旋转运动时,输出的位置信息可能偏离当前位置。模拟信号具有无时延、只需一条信号传输线的优点,但其缺点是在传输过程中容易受到噪声的影响。如上所述,相对式编码器和绝对编码器各有优缺点,一定要根据应用情况选择检测类型。例如,检测电机轴或机器人手臂的旋转角度是需要绝对的角度,检测电机的转子磁极则只需要相对的角度。建议您根据“检测目的”来选用增量式编码器或绝对式编码器。
总结
编码器有两种方式表示位移和位置信息:相对位置检测与绝对位置检测。相对位置的检测方法为增量式,绝对位置的检测方法包括绝对式和伪绝对式。相对式和绝对式各有优缺点,建议大家根据“测量目的”正确选用。
-
增量式编码器和绝对式编码器的区别 #自动化 #plc培训 #零基础学自动化#硬声创作季Hello,World! 2022-10-20
-
#plc #编码器 增量式编码器与绝对式编码器区别.学习电子知识 2022-10-24
-
增量式编码器与绝对值式编码器的区别是什么?2021-10-12 4482
-
增量型编码器与绝对型编码器的区别2009-09-26 3154
-
绝对式光电编码器2010-06-02 6191
-
伺服电机编码器绝对式和增量式区别2018-02-05 35013
-
增量式编码器与绝对式编码器的区别2019-11-06 65451
-
增量式编码器和绝对值编码器选哪个?2023-03-19 5663
-
绝对值编码器和增量式编码器不同在哪儿?2023-04-12 7732
-
虹科干货|绝对式编码器和增量式编码器的区别2023-05-26 3321
-
增量式编码器和绝对值编码器有哪些区别?2023-07-05 6361
-
光纤绝对式和光纤增量式编码器的区别2024-05-15 1545
-
增量编码器和绝对值编码器的区别2024-06-03 6013
-
增量编码器与绝对值编码器的区别2024-11-18 4575
-
绝对值编码器与增量式编码器相比有哪些优势?2025-08-11 2535
全部0条评论

快来发表一下你的评论吧 !
