

传感器在汽车底盘控制系统中的应用
电子说
描述
来源: AEE汽车技术平台
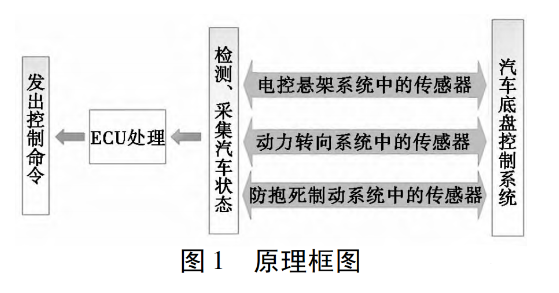
在汽车底盘控制系统中运用到了很多传感器,其中主要包括电控悬架系统、防抱死制动系统、动力转向系统等。
这些传感器的基本原理和功能都是将汽车所需要的非电信号转换成汽车能识别的信号,传感器就这样通过检测,然后进行信号的反馈,底盘控制系统通过接收到的反馈信息对系统进行操控,并完成相应的指令。传感器是汽车控制系统中十分重要的组成部分,它是确保汽车能够正常安全行驶的重要装置。
电控悬架系统中传感器的应用
传统的汽车悬架技术不能根据地面对车身的各种作用力做出分析并及时进行调节。而汽车电控悬架能灵活地感受路面,也能根据检测到的汽车高度、车速、转向角等对汽车做出不同的修正操作,这样既增加了乘客乘坐时的舒适性,也能使操纵稳定性达到最佳的状态,确保汽车平稳安全的行驶。在汽车电控悬架系统中车高传感器和转向角传感器是两个重要的部件。
车高传感器
主要负责对车底高度予以监测,并将高度信息转化为数字信号,由悬架 ECU 对车高进行精确计算,再根据道路的变化情况进行修正,避免车的底盘与地面发生碰撞和摩擦。车高传感器通常采用光电式车高传感器,其工作原理是将光电式车高传感器安装在车身一端,将悬架的上下运动转变为传感器内部窄槽圆盘的旋转运动,圆盘的转动可以使由发光二极管和光敏二极管组成的遮光器输出进行ON/OFF 转换,并将转换信息传输给悬架 ECU。
当车身高度发生变化也就是悬架形变量发生变化时,圆盘在传感器的带动下会发生转动,此时悬架ECU 检测出车身高度发生变化,并做出相应的修正。光电式车高传感器采用光学原理制造,可实现非接触式测量,不会对被测量物形成额外的负载,因此它有测量误差小、精度高、响应时间短等优点。
转向角传感器
方向盘大致可以旋转 2. 9 圈,大约是 1044°,通过转向机构以固定的传动比带动前轮在 40°左右变化。此传感器能够对转向角度进行测定,如果转向的角度超过了系统设定的值,悬架 ECU 会做出相应的调整,促使减震力和弹簧的刚度增加,减震力此时会调整到最佳状态,以防止车身发生侧倾。比较常见的转向角传感器有齿轮式传感器和光码盘式传感器两种,但在汽车应用中由于可靠性问题,光码盘式传感器使用的比较少。
齿轮式传感器采用的是三个齿轮的机械结构,该种传感器测量的主要是转角和转过的圈数,大齿轮依靠转向角管柱的运动而运动,但两个小齿轮不会随着大齿轮的转动而转动,它们和传感器的外壳一起固定在车身上,并且两个小齿轮之间相差一个齿轮数,通过分别采集随方向盘转动的转角大小,再加上相差的一个齿轮数,不同的圈数就会相差特定的角度,从而计算得到方向盘的绝对转角,这样就实现了对转向角度的自动检测,及时发现安全隐患并进行调整。
防抱死制动系统中传感器的应用
在现在发生的交通事故中,大多数仍然是刹车造成的侧翻等事故,所以关注和了解汽车制动防抱死系统是十分重要的事情,在汽车防抱死系统中起到重大作用的必然有传感器。而在汽车防抱死制动系统中应用到的传感器就是轮速传感器。
轮速传感器大致可以分为三类: 电磁式轮速传感器、霍尔效应式轮速传感器、光电式传感器。
但是我们在汽车防抱死制动系统中主要应用的是电磁式轮速传感器和霍尔效应式轮速传感器。现代汽车的防抱死制动系统中基本都装有电磁式轮速传感器,它一般都应用在主减速器或者是变速器中。电磁式轮速传感器由传感头和齿圈构成,传感头的主要组成部分是感应线圈和永磁性磁芯,齿圈就是磁阻较小的铁性材料。电磁式轮速传感器是通过电磁感应线圈利用电磁效应的原理将车轮的转速转换成电信号。
具体的工作原理是: 当齿圈随着车轮转动时,与传感器磁头相对齐的部分发生了变化,使通过感应线圈的磁通量也就是磁场强度发生了变化,从而感应线圈上可以产生不同的感应电动势。
当齿圈的顶部与感应线圈对齐的时候,此时二者之间的间隙是最小的,磁阻也是最小的,传感器永磁性磁芯所产生的磁感线容易通过齿圈,感应线圈的磁通量比较大; 当齿圈的底部与感应线圈对齐的时候,此时二者的间隙是最大的,磁阻也是最大的,传感器永磁性磁芯所产生的磁感线不容易通过齿圈,感应线圈的磁通量比较小。这样感应线圈的磁通量不断交替呈周期性变化,就会产生一个周期性正弦交流电压信号,该信号的频率和齿圈的齿数和转速也就是和车轮的转速是成正比的,这样就可以对车速进行监控和检测。
电磁式轮速传感器结构简单,成本比较低,也可以应用在一些有污垢的地方,但是它的频率响应不高,当车速很高的时候,它的频率响应容易跟不上,从而产生错误的信号,并且它的抗电磁波干扰能力也很差。所以在我们日渐发展的汽车行业中,有时候轮速传感器是不能满足我们的需求的,而霍尔效应式轮速传感器却可以克服这些问题,所以现在霍尔效应式轮速传感器逐渐取代了电磁式轮速传感器。
霍尔效应式轮速传感器的主要组成部分有霍尔元件、永磁体、齿圈等。霍尔元件的工作原理是:将霍尔元件薄片置于磁场方向垂直于薄片的磁场中,当有电流流过该薄片时,在垂直于电流和磁场的方向上将产生电动势。
霍尔效应式轮速传感器的工作原理是:当齿圈的顶部对准霍尔元件的时候,磁力线聚集穿过霍尔元件,这时霍尔元件可以产生较大的电动势,经过放大整形后可以输出低电平; 当齿圈的底部对准霍尔元件的时候,磁力线分散穿过霍尔元件,此时霍尔元件产生的电动势比较小,可以输出高电平。当齿圈和车轮一起转动时,此时霍尔元件输出的电平数是和齿圈的齿数还有齿圈的转速成正比的,所以和车轮的转速也是成正比的,由此可以测出汽车的轮速。
霍尔效应式轮速传感器结构简单、体积较小、使用寿命很长、可靠性很高、并且频率特性好、抗干扰能力强,所以在汽车行业有着很广泛的应用。
动力转向系统中传感器的应用
常见的动力转向系统主要包括主动前轮助力转向系统、主动前轮叠加转向系统和主动后轮转向系统。动力转向系统是利用发动机的动力来帮助操作人员进行转向操纵的装置,在控制过程中采用的传感器类型主要有发动机转速、车速、转矩传感器等。
其原理是把发动机输出部分的机械能转化为压力能,在操作人员的控制下,对转向器或转向系统装置里一些转动器件加以各个方向的气压或液压作用力,用来缓解操作人员的转向操纵力。
由于操纵轻便、灵 活,动力转向系统在汽车制造中被广泛运用。
磁电式车速传感器
磁电式车速传感器又叫电动式传感器,它是由接线柱的磁芯和线圈组成的一个模拟交流信号发生器,是应用电磁感应原理,将汽车行驶速度转换为线圈的感应电动势从而输出的传感器。使用其反转效应可以构成力矩发生器和电磁激振器等。
发动机或点火模块是靠磁轮组运转经过传感器时,交流电压信号在线圈里产生,如在磁轮组上去除一些齿轮,使之能产生同步脉冲信号以确定燃油喷射时刻的。汽车车速越大,感应电压脉冲频率就越大,输出轴转向速就越大,电子控制器件按照感应电压脉冲的值来推算汽车行驶的速度。比较适合用来检测动态。因为它有比较高的输出功率,所以配用电路比较容易,零位和性能比较稳定。
发动机转速传感器
其主要靠飞轮上的信号齿工作,负责查看发动机转动速度来确定曲轴的位置,检查活塞上停点和曲轴转角信号,通过半导体元件把磁信号转化为电信号,并将信号传送至 ECU,用来操控喷油及点火时刻。按产生信号的原理,发动机转速传感器可以分为 2 线制( 电源线和交流信号线) 或 3 线制( 交流信号屏蔽线) 的电磁感应式、3 线制的霍尔式以及光电式。
发动机转速传感器有较高的灵敏度、寿命长、可靠性高的特点。可以完成长间隔传输,有较好的抗冲击性和抗震性。
转矩传感器
通过测量驾驶员作用于方向盘上的力矩,在被测弹性轴上放上侧转应变片而构成应变桥,如给应变桥提电就可测得其弹性轴受转的电信号,此电信号及车速信号被动力转向 ECU 接收后,就可以确定辅助动力的大小和方向。旋转体上的应变桥压输入以及检查到的应变信号的输出就是依靠导电滑轮在旋转与静止的部分之间传递。从而在不同速度行驶时控制转向力矩的大小和方向。
转矩传感器具有精度高、可靠性好、寿命长、频响快等优点。缺点是转矩传感器的体积较大,不宜安装,在慢转速时因为脉冲波的前沿和后沿有些慢不太好比较,所以低速的性能不太理想。
审核编辑:汤梓红
-
汽车底盘高效点焊技术分析与应用2025-02-19 1211
-
汽车底盘控制技术研究2024-02-19 1650
-
回收汽车底盘电池模组 回收汽车底盘电池模组 回收事故汽车底盘电池 退役公交电池回收、货车汽车电池回收2022-01-03 1761
-
传感器在汽车底盘电子控制中的应用现状如何?2021-05-11 2051
-
2020第四届中国上海国际汽车底盘及制动系统展览会2019-12-18 2547
-
基于传感器的汽车底盘电子控制的工作原理是什么?2019-09-04 4725
-
现代汽车底盘电子控制简介2017-01-14 1446
-
模糊自适应PID在汽车底盘测功机中的仿真研究2013-05-06 1327
-
汽车底盘电控技术pps幻灯片教程2012-10-26 9090
-
现代汽车底盘电子控制系统组成有哪些?2010-03-19 13566
-
汽车底盘电子系统,汽车底盘电子系统是什么意思2010-03-11 4679
-
传感器在汽车底盘电子控制中的应用2009-11-03 1862
-
一种汽车底盘自动润滑系统程控器的设计2009-01-10 839
-
汽车底盘构造图2008-05-27 20437
全部0条评论

快来发表一下你的评论吧 !
