

基于ESP8266的简易三轮机器人小车设计
描述
项目作者:ROBO HUB 翻译文首发于:DF创客社区
这篇教程会向你展示如何在家中用基础电子零件制作一辆简单的机器人车。
车子可以通过手机来控制,而且不只限于4个方向。这是一个对于初学者来说非常有趣的项目,占用的完成时间不会很多,通过它不仅可以学习到如何搭建车辆,还可以了解电机对车辆工作的作用,以及一些基本的电子知识、编程实践,甚至一些物理知识。
所需物料
NodeMCU 或者 ESP8266 板
L298N 电机驱动器
BO电机(减速电机)
轮子
纸板片
热熔胶和强力胶
跳线
锂离子电池和电池盒
开关
以下是如果你希望制作一个炫酷版本的替代品
3D打印机
PLA丝线
Tinkercad应用
Cura切片软件
制作步骤
制备底板
这个项目提供两种进行底板制作的方式:可以选择3D打印,也可以选择用纸板制作。(STL文件可以在文末下载)
如果选择3D打印作为底板,需要使用Tinkercad应用进行设计,然后打印。如果选择纸板,则需要根据BO电机的设计参考标准制作模板,然后将模板轮廓画在纸板上,剪裁出底板。
制作电路图
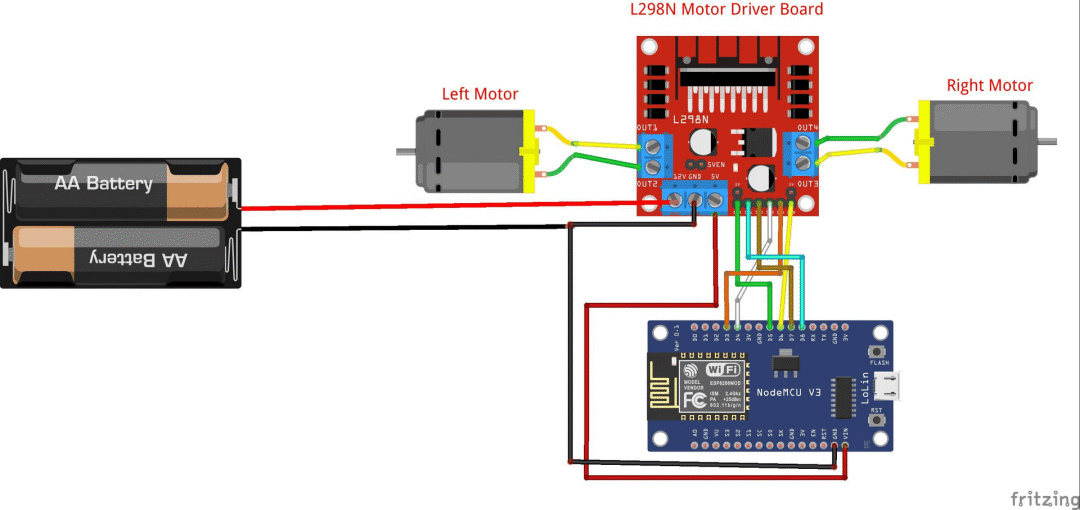
整辆机器人车的电路图如教程所示,没有使用面包板,而是直接使用跳线在组件之间进行连接。
建立连接之前,确保将电池的地线连接到马达驱动器和Nodemcu的GND。电池盒的电池正极连接到马达驱动器的12v插槽,马达驱动器的5v连接到Nodemcu板的Vin现在,马达驱动器和Nodemcu之间的通信连接如下:
ENA 至 GPIO14 (D5)
ENB 至 GPIO12 (D6)
IN_1 至 GPIO15 (D8)
IN_2 至 GPIO13 (D7)
IN_3 至 GPIO2 (D4)
IN_4 至 GPIO0 (D3)
最后,我们把BO电动机的连线的接口连接到马达驱动器上的电动机连接插槽。这样,马达驱动器就可以控制BO马达的运转了。
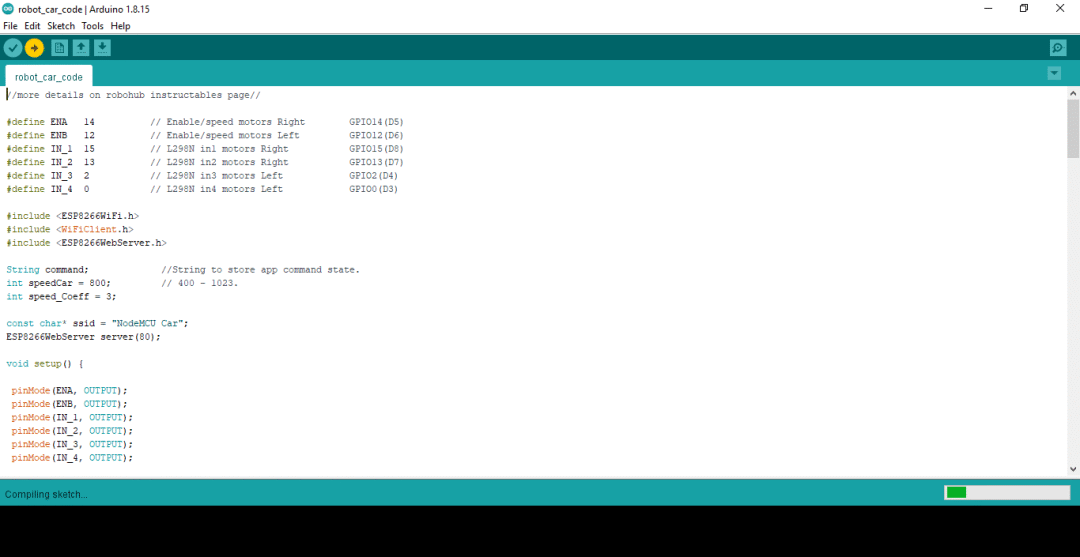
编写Arduino代码
连接开发板到电脑,打开Arduino IDE,接着将教程中提供的代码复制并粘贴到IDE中。(代码可以在文末下载)
如果你想为WiFi设置自定义名字,可以在代码中编辑,如果你对此还不完全清楚,建议不要做任何改变。
点击板子,选择esp8266模块板,现在检查正确的串行端口(COM)号码,然后点击上传代码按钮。
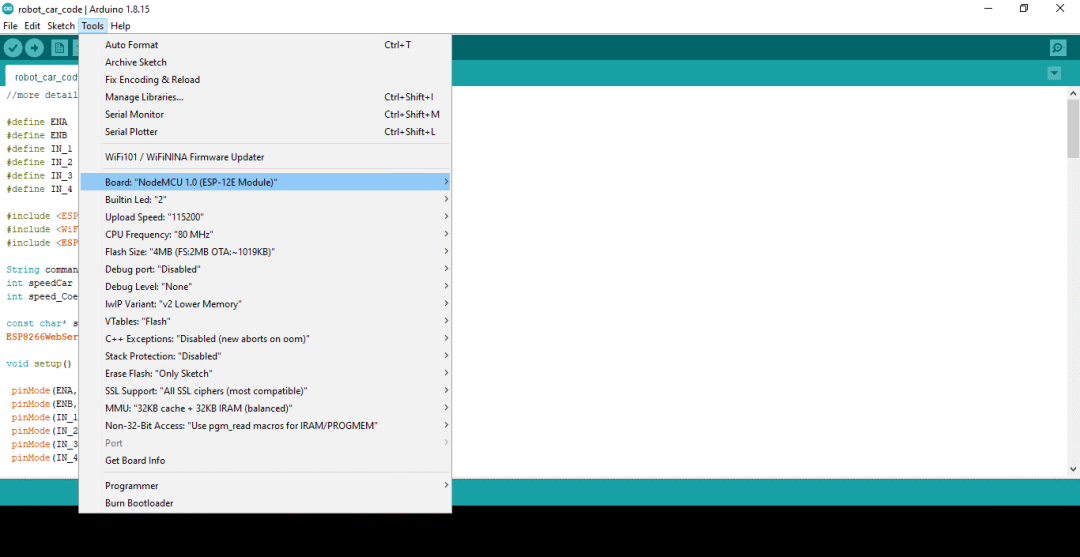
一段时间后,代码将被上传到板子上,现在板子上有了代码。
完成这一步后,通过电池的电力供应测试项目,当你打开开关后,如果一切正常,Nodemcu的LED指示灯将会亮起,你可以在手机上看到Wi-Fi的名字。
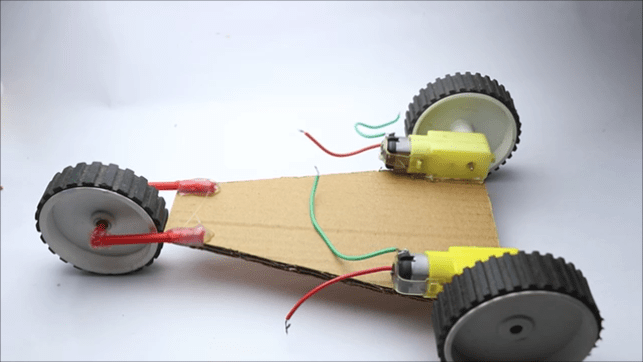
添加前轮
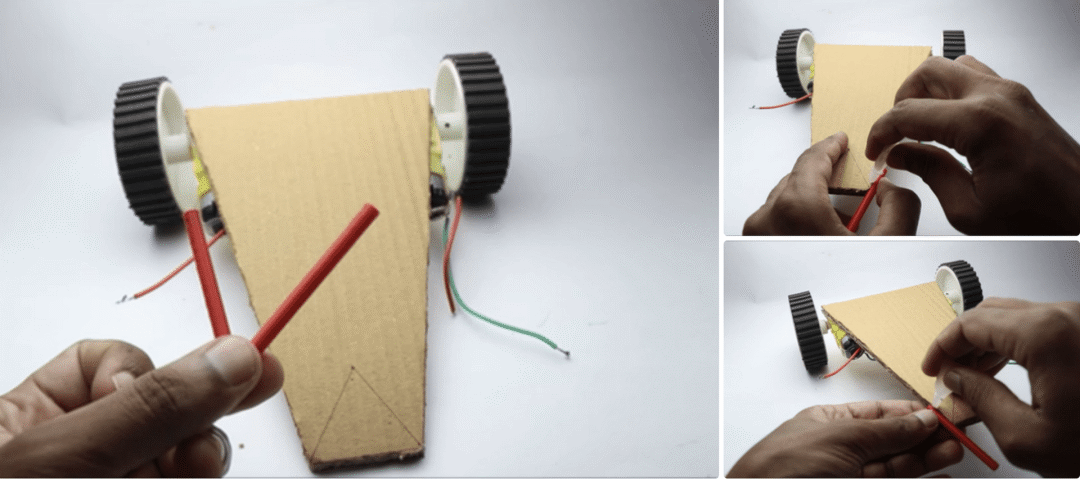
机器人车是三轮车,前面的一个轮子是自由滚动的,另外两个轮子是由电机轴控制的。
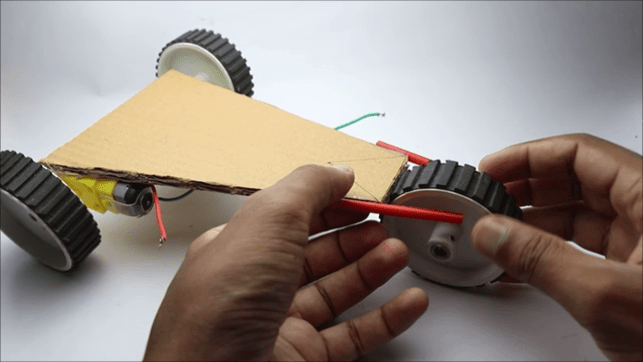
现在对于这个我们使用的是一个简单的机制,我们要做的就是使用一根吸管或一段管子。如果你找不到任何管子,你可以自己动手制作,只需将纸条卷成管状并用强力胶加固。
在纸板的小尖端上放置并使用强力胶固定。
然后可以添加轮子,并使用管子或者自制纸管从中心锁住它!
基础模型已经准备好,现在我们要添加的就是电子元件,并且这并不是一个复杂的任务。
完成装配
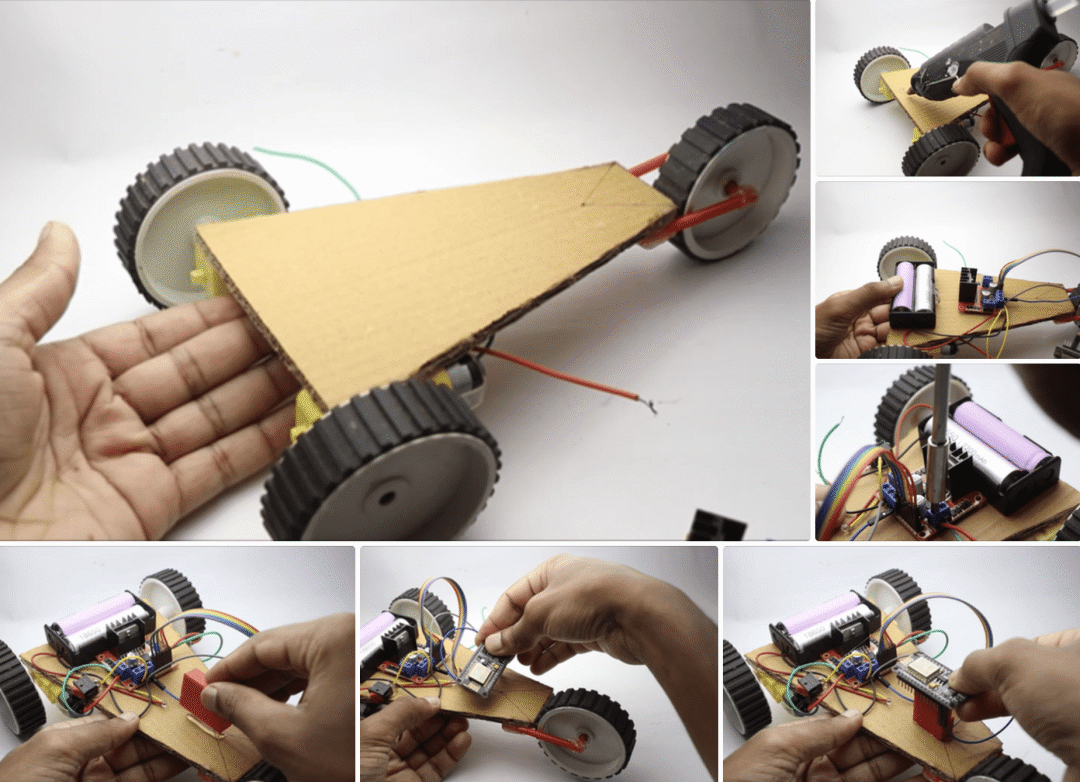
在纸板上放一滴热胶,然后放上装有电池的锂离子电池座。接下来,将电机驱动器固定到纸板上,可以将BO电机的线连接到驱动器的插槽里。最后,放上Nodemcu板。
使用方式
设立机器人车和手机(控制设备)的连接十分简单。使用Wi-Fi接入热点,先在手机上打开Wi-Fi,然后开启机器人车,你将在手机上看到你为车辆所设的Wi-Fi名称,连上网络。然后,你可以打开已预装在你手机上的应用,这样你就能通过一个数字屏幕遥控器来控制机器人车了。
审核编辑:汤梓红
-
如何使用ESP8266和ArduinoUno设计无线遥控两轮机器人漫游车2022-05-13 10787
-
三轮循迹小车2015-11-01 8518
-
三轮移动机器人平移方法2018-01-02 4661
-
基于ESP8266物联网智能小车的设计资料分享2022-01-21 2584
-
自制一辆基于ESP8266的简易三轮机器人小车,可以通过手机遥控!2023-10-12 2495
-
NodeMcu ESP8266 无需任何基础 制作wifi小车2021-10-28 1651
-
最简单DIY基于ESP8266的物联网智能小车②(webserver服务器网页高级遥控版)2021-12-29 1997
-
使用ESP8266-01制作WIFI遥控小车(一)2022-01-12 3155
-
Wifi控制的FPV Rover机器人(带有Arduino和ESP8266)2022-11-18 919
-
带有ESP8266的电报机器人2022-11-21 877
-
基于ESP8266的电报机器人2022-12-21 877
-
ESP8266硬件2023-02-10 7446
-
ESP8266初次如何实现无线通信(基于电脑与ESP8266)2023-05-30 1418
-
机器人小车开源设计2023-06-28 552
-
ESP8266由游戏手柄控制的汽车机器人2023-07-03 1229
全部0条评论

快来发表一下你的评论吧 !
