

TMTS汽车电子仿真及测试研讨会笔记请查收!
描述
11月29日,德思特2023年度TMTS汽车电子仿真及测试研讨会圆满结束。感谢大家的观看与支持!
在直播间收到一些观众的技术问题,我们汇总了热点问题并请讲师详细解答,在此整理分享给大家,请查收!
面向汽车T-BOX与域控制器的HIL测试新方案
Q:目前全球一共只有100多颗卫星,为什么你们的模拟器需要模拟那么多的通道?有什么应用吗?
卫星数量和模拟仿真通道不是等同的,我们一般在GNSS模拟仿真中的搜星通道一般指的是:每个通道代表一颗卫星输出的一个星座的一个频点。这样算下来的话,如果需要同时仿真世界上所有的卫星与频点,则一共需要上百个通道。此外伴随着多径效应模拟、多待测件/多车模拟,以及一些新的应用,需要的通道数就会更多,我们保证了用户模拟的全面性,以及对于未来的扩展性。此外,这些通道是免费开放给用户的,无需额外付费。

Q:软件定义形式有什么优势呢?我自己也可以搭建?
软件定义顾名思义,就是以软件为核心,一方面他带来了灵活性、扩展性以及经济效益;此外核心软件Skydel带来了大量独特的功能,他不因为硬件的变化而改变,最大程度上提供了高性能仿真能力。我们也欢迎用户自己去搭建GNSS模拟器,在Skydel的基础上,采用自己的硬件,我们有提供丰富的指导文件。
Q:能详细介绍下软件定义架构与硬件驱动的区别吗?
软件定义架构(Software-Defined Architecture)和硬件驱动之间有几个主要的区别:
● 抽象层级:软件定义架构通过在软件中定义和管理资源,引入了一个抽象层级,使得应用程序可以通过软件界面来访问和管理底层资源。而硬件驱动是直接与硬件设备交互的程序。
● 灵活性和可编程性:软件定义架构通过软件配置和管理资源,具有更高的灵活性和可编程性,可以根据需求动态改变资源分配和配置。相比之下,硬件驱动的功能和性能通常是固定的,不容易变更。
● 硬件依赖性:软件定义架构减少对特定硬件的依赖,通过引入抽象层级可以在不同的硬件环境中运行。而硬件驱动通常是为特定硬件设备或芯片定制的,对其他硬件可能不适用。
简而言之,软件定义架构通过软件对资源进行配置和管理,具有灵活性和可编程性,并减少对特定硬件的依赖。而硬件驱动直接与硬件设备交互,是硬件资源的控制和管理。
Q:请问软件在环与硬件在环的具体操作是?
GNSS模拟器在软件在环与硬件在环中的使用方法类似,区别在于是否真正地输出了射频信号。这里我以硬件在环为例进行介绍。
用户实时发送真实的车辆轨迹,并生成相应的GNSS射频信号。图中描绘了一个闭环,其中真实位置传输到系统中,自动驾驶仪应用命令实时影响车辆轨迹。系统中的HIL模拟器和Skydel GNSS模拟器造成的附加延迟必须足够小,来保障不会对自动驾驶仪和GNSS接收器性能的测试和测量产生负面影响。整体系统框图如下:
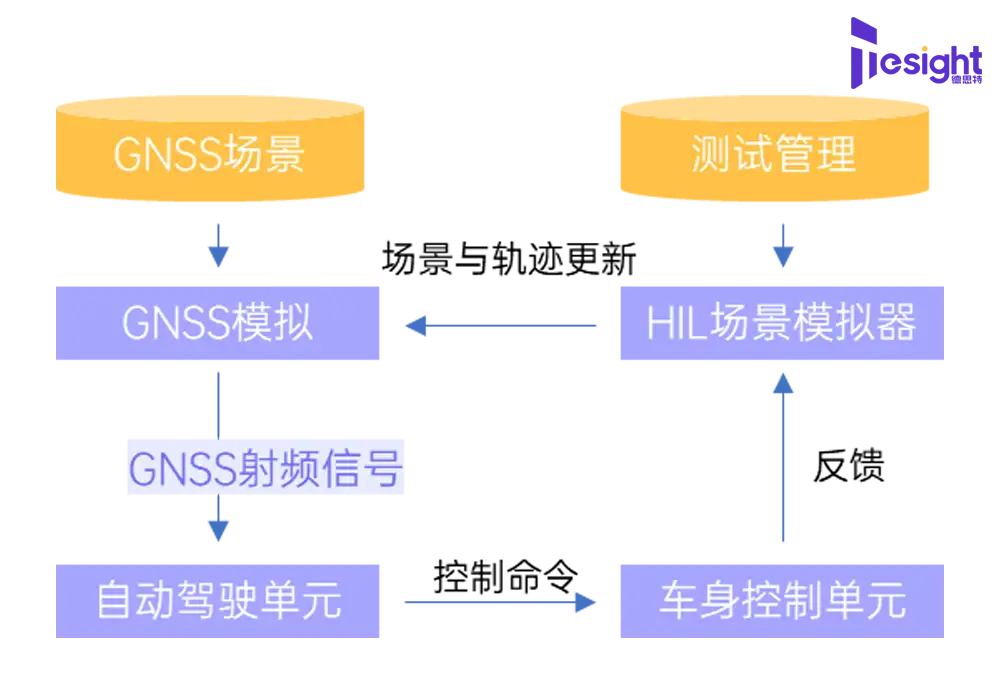
物理连接上:
a) 物理连接上HIL仿真器和GNSS模拟器采用以太网联接
b) 通信协议采用TCP/IP,真实位置信息传输通过UDP协议
c) 提供开放API用于Skydel软件的开放编程与远程控制
d) 另外需要借助时钟装置对HIL模拟器与GNSS模拟器做同步
此外, 德思特提供了一个Skydel HIL客户端(Skydel HIL Client),这是一个提供简单API的库。强烈建议使用此库,不要尝试与Skydel重新实现通信协议。Skydel HIL客户端需要以太网连接,并且对大多数命令混合使用TCP/IP,对真实位置数据使用UDP。Skydel HIL客户端增加了延迟,延迟主要由以太网连接定义。
 软件定义的GNSS模拟器
软件定义的GNSS模拟器
Q:多实例和多辆车是一个概念吗?
这是一个包含概念,多辆车属于多实例仿真的一种,我们认为在同一台设备内进行的多个独立且实时的仿真场景或轨迹,就是多个实例。因此,多实例可能的情况是:
● 多天线:例如同一辆车或者飞机的多个天线,每根天线独立使用,具有独立的信号采集与分析功能,因此是多实例。
● 多车或多无人机:模拟场景下多个实体的交互、运行等,属于多个独立信号的运行,因此是多实例。
● RTK:因为同时具有基准站与流动站两个独立实体,因此是多实例。

汽车总线物理层测试方案
Q:你们的数字化仪是PCIe什么标准?是不是主机带有匹配的插槽就可以开始使用?对工控机有什么要求吗?
我们不同的数字化仪对应的PCIe标准不一样,低速采集的板卡是4.0的标准, 中高速的采集卡是PCIe8.0或者16.0. 主板带有对应插槽就可以,并且您有8.0的插槽条,可以兼容4.0的插槽。
 德思特数字化仪
德思特数字化仪
Q:这个数字化仪有触发输入接口吗?只能采集模拟信号吗?
有的,我们有触发输入的接口,本身的采集通道也可以作为触发通道。数字化仪除了模拟信号,我们还有预留的16个数字IO通道,数字IO和模拟IO可以同时采集。当然如果您只是想获取数字IO,我们也有很多数字IO板卡提供。
汽车大电流注入测试
Q:开环和闭环法怎么选择?依据是什么?
开环和闭环方法是以测试布置为依据来做区分,不同的方法测试布置要求明显不同,测试结果也有差异,相对而言,闭环测试法的要求更加严苛。一般来说,我们测试标准中会有规定需要用哪种测试方法,如果没有规定需要自己选择,那么选择开环还是闭环法主要取决于你的产品设计和测试要求。如果你的产品设计和测试要求较为严格,那么可能需要选择闭环法。如果你的产品设计和测试要求相对较为宽松,那么开环法可能是一个更好的选择。总的来说,选择哪种方法主要取决于你的具体需求和情况。在做出选择时,你可能需要考虑你的产品设计、测试要求以及你的资源和能力。
Q:你们的报告生成器可以生成的文件有哪些内容呢?
生成报告分为三个步骤。首先,创建或者选择一个模板文件作为报告的基础。然后设置所需的报告生成器设置。最后生成并检查测试报告。
①模板文件可以采用Microsoft Word、Microsoft Excel或文本格式制作。
②选择模板文件并确定报告内容后即可生成报告,模板文件中包含各个测试的代码(只列举了几项)。
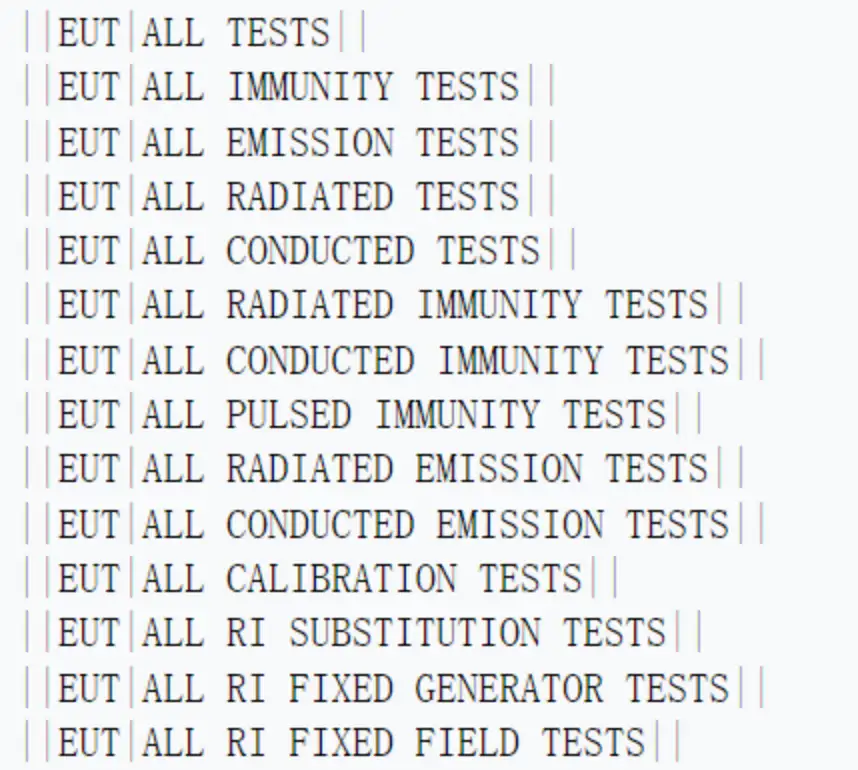
③报告生成器可以生成图形文件和表格文件,报告生成器已进行扩展,不仅可以更轻松地指定应包含哪些图表,而且甚至可以在一个图表中包含多条“线”。可以生成不限于以下内容:
● 组合多条图表线
● 单频段多频段测试中产生的所有数据的记录,包括像辐射抗扰中生成的磁场图
● 可定制的AD通道测量表
Q:请问你们的套装支持什么标准呢?

从上图可以看出,我们的套装支持,国际标准,国家标准,除了表格中说到的这一些,由于我们能产生大于200 mA的电平等级且产生的频率范围覆盖我国车企的标准。那么我们还支持绝大部分车企的标准。
 德思特汽车大电流注入测试方案
德思特汽车大电流注入测试方案
汽车传感器仿真和信号分析
Q:我看直播里面讲的传感器仿真是基于压阻式的基本传感器,那对于智能传感器,比如MEMS这种可以仿真吗?
这个比较复杂的智能传感器集成了部分芯片,主控在里面,这个是我们仿真板卡做不到的。不过这种情况,一般是针对于自动驾驶里面应用居多,都是在软件层上去做仿真模拟。如果您有这种仿真测试的集成需求,也可以找我们,我们背靠研发团队,是可以给您完全的解决方案的。
Q:如果我想做一套故障注入的测试系统,但是想用网线去控制,可以实现吗?
这个也是可以做到的,我们有这种LXI机箱,插入PXI板卡,可以通过以太网或者USB去控制。
面向自动驾驶与智慧城市的C-V2X与C-ITS方案
Q:Sdk 支持哪些软件语言,或者软件集成开发环境?
支持C和Python的语言。软件集成开发环境要求如下:
1.操作系统要求:Ubuntu Linux 18.04或更高版本。
2.V2X设备要求:安装、授权并运行德思特V2X软件堆栈。
3.Python SDK要求:
- pip3包管理器,用于安装Python软件包。
- Python 3.7或更高版本,用于运行Python示例。
4.C SDK要求:
- 开发者环境,例如build-essentials、cmake等,可以从.c源代码生成可执行文件并运行
Q:你们提供的这个应用程序和高德、百度这些有什么区别?
最大的区别就是它显示基于V2X的数据,并显示情境警告。例如前方碰撞警告等一系列的应用场景,可以在车载显示屏上显示,也可以与后视镜集成,相较于直接使用手机会有更大的安全性,不易分散注意力。而且是不需要蜂窝网络连接就能实现提醒,在没有信号的情况下或者信号差的情况下也可以使用。
Q:你们的V2X协议栈有指定的硬件?
我们的V2X协议栈没有指定硬件,它支持国际上目前常用的ETSl、ISO、IEEE、SAE、CAICT、CAICV、CCSA定义的标准和指令,以及C2C-CC、C-Roads、NISSTC的配置文件。
 德思特C-V2X与C-ITS方案
德思特C-V2X与C-ITS方案
Q:V2X消息接口怎么访问呢?
我们的V2X堆栈提供了SDK,可以整合车辆数据(例如CAN接口提取的专有车辆数据等)发送来源更加丰富的V2X消息,也可以是发送自定义的V2X消息,同时可以处理接收到的设备消息(包括其他车辆和道路基础设施、传感器等)和自定义消息。更多详细信息可以联系德思特技术工程师获取《德思特V2X软件栈和SDK的使用指南》,其中对于具体案例和访问方法都有介绍。
-
技术 | ADC/DAC芯片测试研讨会笔记请查收!2025-06-24 1180
-
直播 | GB/T 45086与ISO11451标准深度解读研讨会笔记请查收!2025-06-18 1307
-
面向未来量子通信与大物理研究线上研讨会QA笔记请查收!2025-04-21 843
-
信号完整性仿真与测试系列研讨会2023-07-05 1245
-
SWCF2022 演讲笔记:GNSS模拟赋能汽车HIL测试2022-12-05 1353
-
碎片化市场电子研讨会:Android、仿真器的测试2018-11-06 3387
-
横河与Metron和DTS联合举办汽车测试研讨会2018-10-22 2352
-
Metron的EV汽车电机特性、仿真与测试研讨会一起召开2018-09-24 3917
-
2017中国西部微波射频技术研讨会暨第二十三届国际电子测试测量研讨会2017-07-05 1323
-
2015 TI 汽车电子研讨会震撼来袭!2017-04-27 1046
-
一博全国技术研讨会——武汉研讨会召开在即2014-04-01 4361
-
在线研讨会-基于ISO16750的汽车电子测试方案2013-09-22 8797
-
网上研讨会2013-06-27 3746
-
汽车零部件系列技术研讨会暨采购配对会2009-08-28 3845
全部0条评论

快来发表一下你的评论吧 !
