

感应电机传统三电平直接转矩控制方法
电子说
描述
导读:本期文章介绍感应电机传统三电平12扇区的直接转矩控制。针对两电平直接转矩控制在高速时驱动功率不足和转矩脉动大的问题,从而引进三电平来进行改善。
一、引言
为了解决两电平传统直接转矩控制系统转矩脉动大、响应慢和驱动功率不足的问题,本节介绍三电平逆变器的原理及其应用于异步电机直接转矩控制的具体方法,通过MATLAB仿真验证了其可行性和优越性,结果显示该控制方法具有动态响应快、抗扰性强、转矩脉动小、谐波分量小、开关频率稳定等优点,对提高异步电机直接转矩控制系统的性能以及减小开关管的损耗有一定的成效。
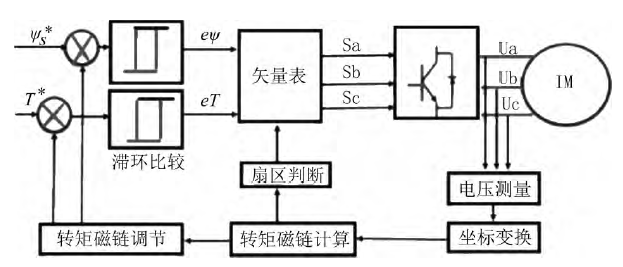
图1-2 感应电机三电平12扇区的直接转矩控制框图
二、两电平直接转矩控制
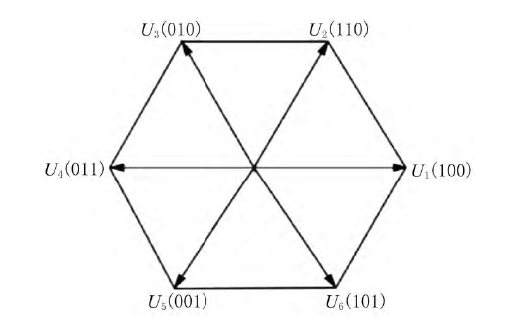
图2-1 两电平逆变器电压矢量
两电平的直接转矩控制产生8个电压矢量,其中有两个零矢量用于减速或延时。这种控制方法比较粗糙不精确,尤其在定子磁链由某一扇区运动到零一扇区时,磁链轨迹会明显脱离标准圆形轨迹,使磁链轨迹畸变,从而导致定子电流的突变,引起电磁转矩的脉动,若电机高速运行则会造成转轴的抖动,同时发生较大的噪声,严重的会使电机线圈内的电流反复跳变,影响系统运行。
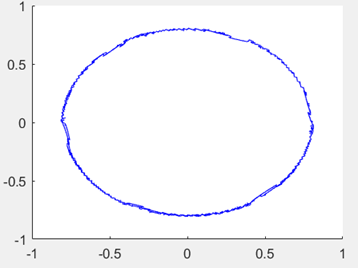
图2-2 磁链圆轨迹
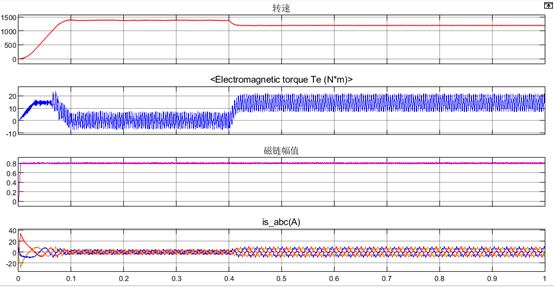
图2-3 仿真波形变化情况
从图(2-2)和(2-3)可知,磁链圆轨迹畸变和电磁转矩的脉动比较大。
三、三电平直接转矩控制
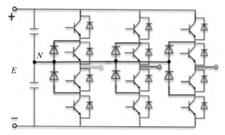
图3-1 三电平逆变器拓扑原理图
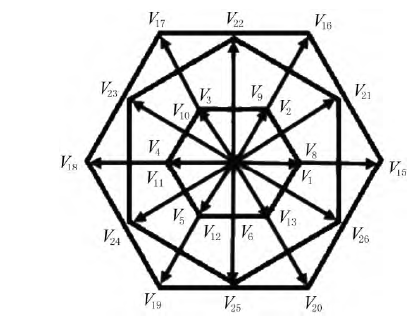
图3-2 三电平逆变器的电压矢量
从图(3-2)可知,三电平逆变器有27个电压矢量。与传统的两电平逆变器相比,在三电平逆变器中,电压矢量为27,远远大于两电平的矢量数8,所以矢量选择范围更广,能够更好地逼近正弦磁链,控制电机获得更好的控制性能。
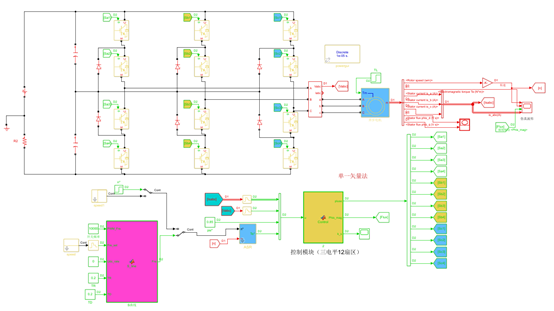
图3-3 异步电机直接转矩控制系统仿真(三电平12扇区)
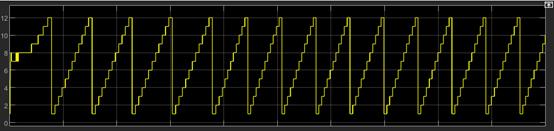
图3-4 12扇区
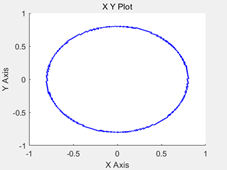
图3-5 磁链圆轨迹
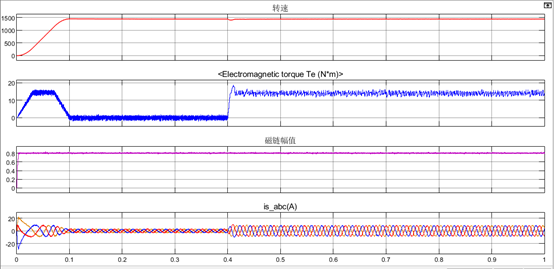
图3-6 仿真波形变化情况
从图(3-5)和(3-6)可知,磁链圆轨迹畸变和电磁转矩的脉动比较小。
四、总结
本文叙述了两电平传统直接转矩控制的控制原理,并进行了仿真,证实了其存在的不足。针对其不足引入了三电平逆变器,阐述了控制策略,分析了其整个控制过程,并通过仿真验证了三电平多矢量控制对谐波抑制及减小转矩脉动的有效性和应用于大功率非恒转矩负载的实用性,较为显著地提高了直接转矩控制系统的抗扰性和控制精度。
审核编辑:汤梓红
-
新型三相异步电机直接转矩控制方法2023-10-18 2573
-
感应电机智能调速2025-05-28 361
-
三相感应电机SVM-DTC系统2025-06-13 564
-
无速度传感器感应电机控制系统转速辨识方法研究2025-07-09 299
-
效率最优的感应电机无差拍直接转矩控制2025-07-16 311
-
电机矢量控制与转矩控制技术及电机选型经典计算公式、步骤、实例2020-06-29 9337
-
感应电机无速度传感器直接转矩控制系统2009-12-12 877
-
基于DSP交流感应电机直接转矩模糊控制系统2016-04-25 594
-
五相感应电机转矩跟踪电子变极方法_尹溶森2017-01-08 761
-
04现代电机控制-三相感应电动机直接转矩控制2017-01-21 1103
-
感应电动机直接转矩控制中电压状态选择2017-09-12 826
-
八开关三相逆变器-感应电机传动系统直接转矩控制算法2018-04-20 1419
-
基于DSP的感应电机直接转矩变频调速系统2021-05-11 1297
-
感应电机设计方法_感应电机结构特点2023-03-10 1708
-
异步电机直接转矩控制(12扇区三电平SVPWM)2023-03-29 700
全部0条评论

快来发表一下你的评论吧 !
